Stm32基础
Stm32基础
目录
常用功能函数
初始化gpio函数
作用:初始化一个或者多个io口(同一组)的工作方式和速度
该函数主要是操作GPIO CRL(CRH)寄存器,在上拉或者下拉的时候有设置BSRR或者BRR寄存器
void GPIO_Init(GPIO_TypeDef* GPIOx, GPIO_InitTypeDef* GPIO_InitStruct);
注意:外设(包括GPIO)在使用之前,几乎都要先使能对应的时钟
参数
第一个参数:
GPIOA
GPIOB
GPIOC
GPIOD
GPIOE
GPIOF
GPIOG
可选参数
第二个参数为一个结构体,三个变量成员

GPIO_Pin
GPIO_Pin_0
GPIO_Pin_1
GPIO_Pin_2
GPIO_Pin_3
GPIO_Pin_4
GPIO_Pin_5
GPIO_Pin_6
GPIO_Pin_7
GPIO_Pin_8
GPIO_Pin_9
GPIO_Pin_10
GPIO_Pin_11
GPIO_Pin_12
GPIO_Pin_13
GPIO_Pin_14
GPIO_Pin_15
可选参数
GPIO_Speed
GPIO_Speed_10MHz = ,
GPIO_Speed_2MHz,
GPIO_Speed_50MHz
可选参数
GPIO_Mode
GPIO_Mode_AIN = 0x0,//模拟输入
GPIO_Mode_IN_FLOATING = 0x04,//浮空输入
GPIO_Mode_IPD = 0x28,//下拉输入
GPIO_Mode_IPU = 0x48,//上拉输入
GPIO_Mode_Out_OD = 0x14,//开漏输出
GPIO_Mode_Out_PP = 0x10,//通用推挽输出
GPIO_Mode_AF_OD = 0x1C,//复用开漏输出
GPIO_Mode_AF_PP = 0x18//复用推挽
可选参数
示例

读取输入电平函数
作用:读取某个GPIO的输入电平
实际操作的是GPIOx_IDR寄存器
uint8_t GPIO_ReadInputDataBit(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin);
示例

作用:读取某组GPIO的输入电平
实际操作的是GPIOx_IDR寄存器
uint16_t GPIO_ReadInputData(GPIO_TypeDef* GPIOx);
示例

读取输出电平函数
作用:读取某个GPIO的输出电平
实际操作的是GPIO_ODR寄存器
uint8_t GPIO_ReadOutputDataBit(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin);
示例

作用:读取某组GPIO的输出电平
实际操作的是GPIO_ODR寄存器
uint16_t GPIO_ReadOutputData(GPIO_TypeDef* GPIOx);
示例

设置输出电平函数
void GPIO_SetBits(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin);
void GPIO_ResetBits(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin);
void GPIO_WriteBit(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin, BitAction BitVal);
void GPIO_Write(GPIO_TypeDef* GPIOx, uint16_t PortVal);

跑马灯实验
led.h
#ifndef __LED_H
#define __LED_H
void LED_Init(void); #endif
代码
led.c
#include "led.h"
#include "stm32f10x.h" void LED_Init(void){
GPIO_InitTypeDef GPIO_InitStruct;
//使能对应的时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE);//
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOE,ENABLE);////初始化gpioB.5与gpioE.5 GPIO_InitStruct.GPIO_Mode=GPIO_Mode_Out_PP;
GPIO_InitStruct.GPIO_Pin=GPIO_Pin_5;
GPIO_InitStruct.GPIO_Speed=GPIO_Speed_50MHz; GPIO_Init(GPIOB,&GPIO_InitStruct);//初始化gpioB.5
GPIO_Init(GPIOE,&GPIO_InitStruct);//初始化gpioE.5
GPIO_SetBits(GPIOB,GPIO_Pin_5);//设置GPIOB.5输出低电平
GPIO_SetBits(GPIOE,GPIO_Pin_5);//设置GPIOE.5输出低电平
}
代码
main.c
#include "stm32f10x.h"
#include "led.h"
#include "delay.h" int main(void){ //初始延时
delay_init();
LED_Init(); while()
{
GPIO_SetBits(GPIOB,GPIO_Pin_5);
GPIO_SetBits(GPIOE,GPIO_Pin_5);
delay_ms(); GPIO_ResetBits(GPIOB,GPIO_Pin_5);
GPIO_ResetBits(GPIOE,GPIO_Pin_5);
delay_ms();
} }
代码
蜂鸣器实验
原理

beep.h
#ifndef __BEEP_H
#define __BEEP_H
#include "sys.h" //蜂鸣器端口定义
#define BEEP PBout(8) // BEEP,蜂鸣器接口 void BEEP_Init(void); //初始化 #endif
代码
beep.c
#include "beep.h" //初始化PB8为输出口,并使能这个口的时钟
//蜂鸣器初始化
void BEEP_Init(void)
{ GPIO_InitTypeDef GPIO_InitStructure; RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE); //使能GPIOB端口时钟 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8; //BEEP-->PB.8 端口配置
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //速度为50MHz
GPIO_Init(GPIOB, &GPIO_InitStructure); //根据参数初始化GPIOB。8
GPIO_ResetBits(GPIOB,GPIO_Pin_8);//输出0,关闭蜂鸣器输出 }
代码
main.c
#include "sys.h"
#include "delay.h"
#include "beep.h" int main(void)
{
delay_init(); //延时函数初始化 BEEP_Init(); //初始化蜂鸣器端口
while()
{ //BEEP=0;
GPIO_ResetBits(GPIOB,GPIO_Pin_8);
delay_ms();//延时300ms //BEEP=1;
GPIO_SetBits(GPIOB,GPIO_Pin_8);
delay_ms();//延时300ms
}
}
代码
按键实验
原理图

按键扫描

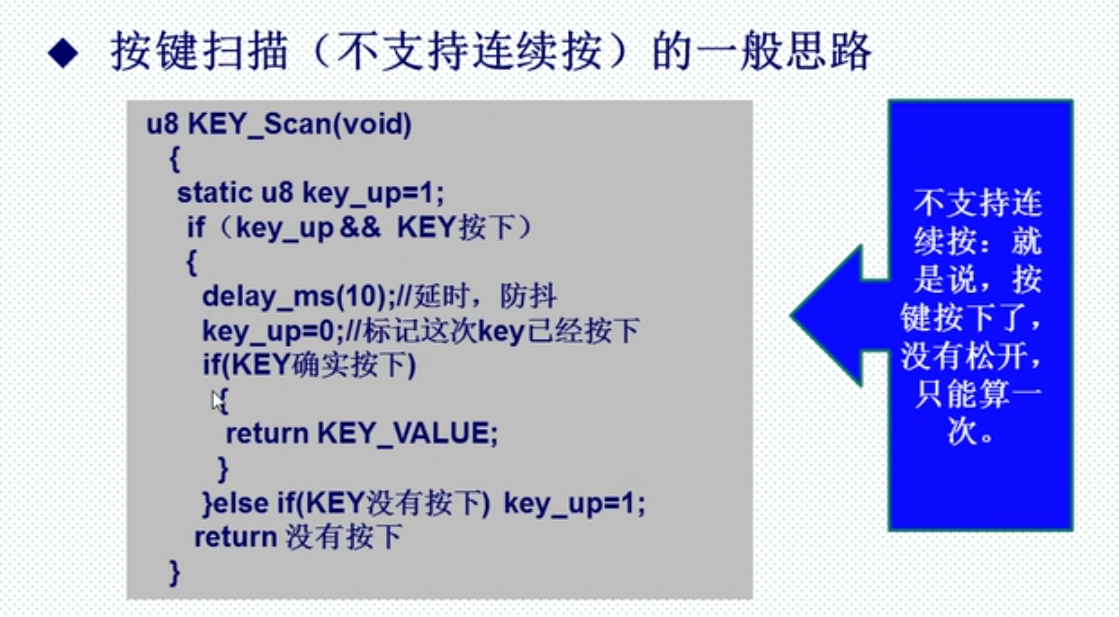
解决办法

led.h
#ifndef __LED_H
#define __LED_H #define LED0 PBout(5)// PB5
#define LED1 PEout(5)// PE5
void LED_Init(void); #endif
代码
led.c
#include "led.h"
#include "stm32f10x.h" void LED_Init(void){
GPIO_InitTypeDef GPIO_InitStruct;//
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOE,ENABLE);
//RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOE | RCC_APB2Periph_GPIOB,ENABLE); GPIO_InitStruct.GPIO_Mode=GPIO_Mode_Out_PP;
GPIO_InitStruct.GPIO_Pin=GPIO_Pin_5;
GPIO_InitStruct.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOB,&GPIO_InitStruct);
GPIO_SetBits(GPIOB,GPIO_Pin_5); GPIO_InitStruct.GPIO_Mode=GPIO_Mode_Out_PP;
GPIO_InitStruct.GPIO_Pin=GPIO_Pin_5;
GPIO_InitStruct.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOE,&GPIO_InitStruct);
GPIO_SetBits(GPIOE,GPIO_Pin_5);
}
代码
key.h
#ifndef __KEY_H
#define __KEY_H
#include "sys.h" //#define KEY0 PEin(4) //PE4
//#define KEY1 PEin(3) //PE3
//#define KEY2 PEin(2) //PE2
//#define WK_UP PAin(0) //PA0 WK_UP #define KEY0 GPIO_ReadInputDataBit(GPIOE,GPIO_Pin_4)//读取按键0
#define KEY1 GPIO_ReadInputDataBit(GPIOE,GPIO_Pin_3)//读取按键1
#define KEY2 GPIO_ReadInputDataBit(GPIOE,GPIO_Pin_2)//读取按键2
#define WK_UP GPIO_ReadInputDataBit(GPIOA,GPIO_Pin_0)//读取按键3(WK_UP) #define KEY0_PRES 1 //KEY0按下
#define KEY1_PRES 2 //KEY1按下
#define KEY2_PRES 3 //KEY2按下
#define WKUP_PRES 4 //KEY_UP按下(即WK_UP/KEY_UP) void KEY_Init(void);//IO初始化
u8 KEY_Scan(u8); //按键扫描函数
#endif
代码
key.c
#include "stm32f10x.h"
#include "key.h"
#include "sys.h"
#include "delay.h" //按键初始化函数
void KEY_Init(void) //IO初始化
{
GPIO_InitTypeDef GPIO_InitStructure; RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA|RCC_APB2Periph_GPIOE,ENABLE);//使能PORTA,PORTE时钟 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2|GPIO_Pin_3|GPIO_Pin_4;//KEY0-KEY2
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU; //设置成上拉输入
GPIO_Init(GPIOE, &GPIO_InitStructure);//初始化GPIOE2,3,4 //初始化WK_UP-->GPIOA.0 下拉输入
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPD; //PA0设置成输入,默认下拉
GPIO_Init(GPIOA, &GPIO_InitStructure);//初始哈CPIOA.0 }
//按键处理函数
//返回按键值
//mode:0,不支持连续按;1,支持连续按
//0,没有任何按键按下
//1,key0按下
//2,key1按下
//3,key2按下
//4,key3按下
//注意此函数有响应优先级,KEY0>KEY1>KEY2>KEY3!!
u8 KEY_Scan(u8 mode)
{
static u8 key_up=;//按键按松开标志
if(mode)key_up=; //支持连按
if(key_up&&(KEY0==||KEY1==||KEY2==||WK_UP==))
{
delay_ms();//去抖动
key_up=;
if(KEY0==)return KEY0_PRES;
else if(KEY1==)return KEY1_PRES;
else if(KEY2==)return KEY2_PRES;
else if(WK_UP==)return WKUP_PRES;
}else if(KEY0==&&KEY1==&&KEY2==&&WK_UP==)key_up=;
return ;// 无按键按下
}
代码
beep.h
beep.c
main.c
#include "led.h"
#include "delay.h"
#include "key.h"
#include "sys.h"
#include "beep.h" int main(void)
{
vu8 key=;
delay_init(); //延时函数初始化
LED_Init(); //LED端口初始化
KEY_Init(); //初始化与按键连续的硬件接口
BEEP_Init(); //初始化蜂鸣器端口
LED0=; //先点亮红灯
while()
{
key=KEY_Scan(); //得到键值
if(key)
{
switch(key)
{
case WKUP_PRES: //控制蜂鸣器
BEEP=!BEEP;
break;
case KEY2_PRES: //控制LED0翻转
LED0=!LED0;
break;
case KEY1_PRES: //控制LED1翻转
LED1=!LED1;
break;
case KEY0_PRES: //同时控制LED0,LED1翻转
LED0=!LED0;
LED1=!LED1;
break;
}
}else delay_ms();
}
}
代码
端口复用与重映射
端口复用
简单来说就是一个端口有多种功能选择,复用功能更多请查表。


重映射


Stm32基础的更多相关文章
- STM32基础问题分析——PWM配置
STM32基础问题分析--PWM配置 在使用STM32F103产生固定频率.固定占空比的PWM波时,虽然有官方以及众多开发板提供的例程,但是关于有点问题并没有说的很清晰,并且<STM32F10X ...
- 初学嵌入式STM32基础下选哪款开发板适合学习
iTOP-4412开发板 目前为止,在用户网盘上已经积累了多达100G以上资料, 这些资料都是和4412相关的,并不是随便拼凑起来的!同时我们也完全开放原厂资料. 鉴于用户对于海量资料无从下手的问题, ...
- stm32基础入门
1.开发工具,初学者建议MDK,后期ivr 2.寄存器开发or库 版本开发:先寄存器开发,后期两者结合: 3.软件仿真or开发板,先软件仿真,后期两者结合: 建立工程: 1.包含三部分:start.u ...
- 单片机零基础学习之从“点灯”入门STM32
本篇文章通过一个简单的例子来熟悉模块化编程以及利用库函数的方法进行开发使用STM32外设的基本流程. 首先,我们打开本讲的例程,在工程目录我们可以看到驱动分组下有 led.delay 两个.c源文件, ...
- 自学stm32的一些个人经验
1.首先我们先看看与STM32相关的文档 我们假定大家已经对STM32的书籍或者文档有一定的理解.如不理解,请立即阅读STM32的文档,以获取最基本的知识点. 如果你手上拥有ST官方主推的STM32神 ...
- 学习STM32单片机,从菜鸟到牛人就是这样简单(配视频资料)
我想说,为了学习单片机而去学习单片机的思路不对. 你问,如何系统地入门学习stm32? 本身就是一个错误的问题.假如你会使用8051 , 会写C语言,那么STM32本身并不需要刻意的学习. 你要考虑的 ...
- stm32专属于菜鸟的学习方法
1.首先我们先看看与STM32相关的文档 我们假定大家已经对STM32的书籍或者文档有一定的理解.如不理解,请立即阅读STM32的文档,以获取最基本的知识点. 如果你手上拥有ST官方主推的STM32神 ...
- 如何迅速入门STM32
我想说,为了学习单片机而去学习单片机的思路不对. 你问,如何系统地入门学习stm32? 本身就是一个错误的问题.假如你会使用8051 , 会写C语言,那么STM32本身并不需要刻意的学习. 你要考虑的 ...
- STM32 C++编程 005 I2c(Soft)类
使用 C++ 语言给 STM32 编写一个 I2c(Soft)类 我使用的STM32芯片:STM32F103ZET6 我们使用的STM32库版本:V3.5.0 注意: 想学习本套 STM32 C++编 ...
随机推荐
- Confluence 6 SQL Server 问题解决
如果你收到了下面的错误信息,检查你给出的 confluenceuser 用户具有所有需要的数据库权限,当你使用 localhost 进行连接的时候. Could not successfully te ...
- pytorch的学习资源
安装:https://github.com/pytorch/pytorch 文档:http://pytorch.org/tutorials/beginner/blitz/tensor_tutorial ...
- vue.js 入门学习
<!DOCTYPE html><html lang="en"><head> <meta charset="UTF-8" ...
- JS控制文本框内键盘上下左右键的焦点
avaScript键盘上下左右控制文本框焦点的方法有很多,这里简单说两种方法: 方法一: 创建一个table的dom元素,包含5行4列的文本框 <!DOCTYPE HTML PUBLIC &qu ...
- 对于stark(curd)插件的使用简单介绍
一.创建表 from django.db import models from django.db import models class Department(models.Model): &quo ...
- HTML&javaSkcript&CSS&jQuery&ajax(四)
一.HTML创建响应设计 Responsive Web Design 可以改变尺寸传递网页,对于平板和移动设备是必须的 1.<!DOCTYPE html><html lang=&qu ...
- RESTful架构解读
什么是REST REST与技术无关,代表的是一种软件架构风格.REST全称是Representational State Tranfer, 表征性状态转移. REST从资源的角度类审视整个网络,它将分 ...
- Python 读写excel类
#-*- coding: utf8 -*- import xlrd import xlwt from Public import GlobalClass def openexcel(path): tr ...
- C++ Primer 笔记——lambda表达式
1.一个lambda表达式表示一个可调用的代码单元,可以理解为一个未命名的内联函数,但是与函数不同,lambda表达式可能定义在函数内部.其形式如下: [capture list] (paramete ...
- 论文阅读笔记三十五:R-FCN:Object Detection via Region-based Fully Convolutional Networks(CVPR2016)
论文源址:https://arxiv.org/abs/1605.06409 开源代码:https://github.com/PureDiors/pytorch_RFCN 摘要 提出了基于区域的全卷积网 ...