Ubuntu 18.04 + ROS Melodic + TurtleBot3仿真
1. 下载安装包
官网地址:
http://wiki.ros.org/action/show/Robots/TurtleBot?action=show&redirect=TurtleBot
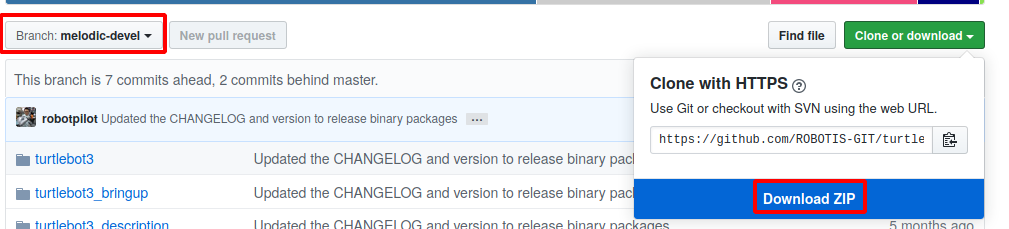
所有相关的包都在这里, 按需下载(注意选择melodic-devel分支):
我全部下载了, 所有的下载链接如下:
- turtlebot3: https://github.com/ROBOTIS-GIT/turtlebot3/tree/melodic-devel
- turtlebot3_msgs: https://github.com/ROBOTIS-GIT/turtlebot3_msgs/tree/melodic-devel
- turtlebot3_simulations: https://github.com/ROBOTIS-GIT/turtlebot3_simulations/tree/melodic-devel
- turtlebot3_applications: https://github.com/ROBOTIS-GIT/turtlebot3_applications/tree/melodic-devel
- turtlebot3_autorace: https://github.com/ROBOTIS-GIT/turtlebot3_autorace/tree/melodic-devel
- hls_lfcd_lds_driver: https://github.com/ROBOTIS-GIT/hls_lfcd_lds_driver/tree/melodic-devel
- open_manipulator: https://github.com/ROBOTIS-GIT/open_manipulator/tree/melodic-devel
- dynamixel_sdk: https://github.com/ROBOTIS-GIT/DynamixelSDK/tree/melodic-devel
下载完成后解压, 并重命名把后面的"-melodic-devel"删掉(不重命名也不影响, 只是我有强迫症), 然后把这些文件夹放到一个文件夹下, 方便后面的操作:
2. 安装
Ctrl+Alt+T 打开终端, 输入:
echo $ROS_PACKAGE_PATH

/opt/ros/melodic/share为ROS包的路径, 现在我们把这些解压后的文件夹复制到这个路径下:
先cd到你放那些包的文件夹下,
sudo chmod 755 -R *
sudo cp -r * /opt/ros/melodic/share/
看看复制成功没有
ls /opt/ros/melodic/share/
3. 验证和仿真
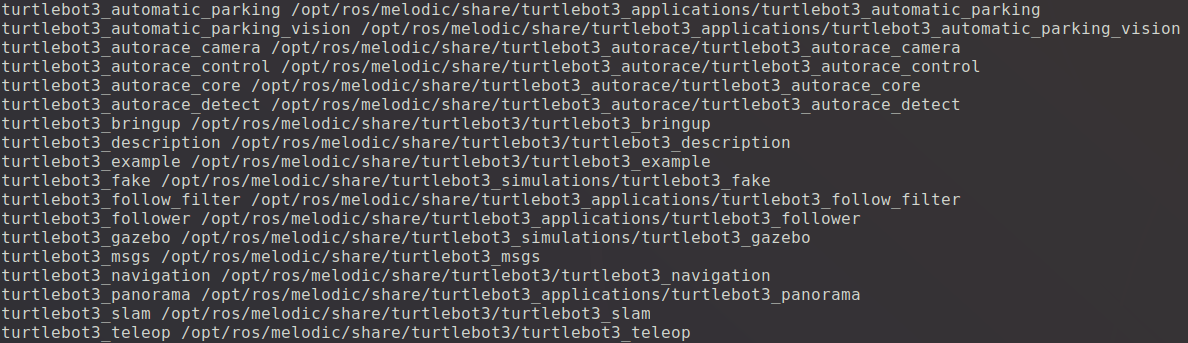
运行rospack list, 有我们安装的那些包就行了
rospack list
部分截图如下:
我们来运行仿真:
roslaunch turtlebot3_gazebo turtlebot3_world.launch

报了错误:
RLException: Invalid <arg> tag: environment variable 'TURTLEBOT3_MODEL' is not set.
Arg xml is <arg default="$(env TURTLEBOT3_MODEL)" doc="model type [burger, waffle, waffle_pi]" name="model"/>
The traceback for the exception was written to the log file
TURTLEBOT3_MODEL没有设置, 需要给它指定[burger, waffle, waffle_pi]中的一个, 我们随便指定一个:
在终端输入:
export TURTLEBOT3_MODEL=burger
再次运行上面的命令:
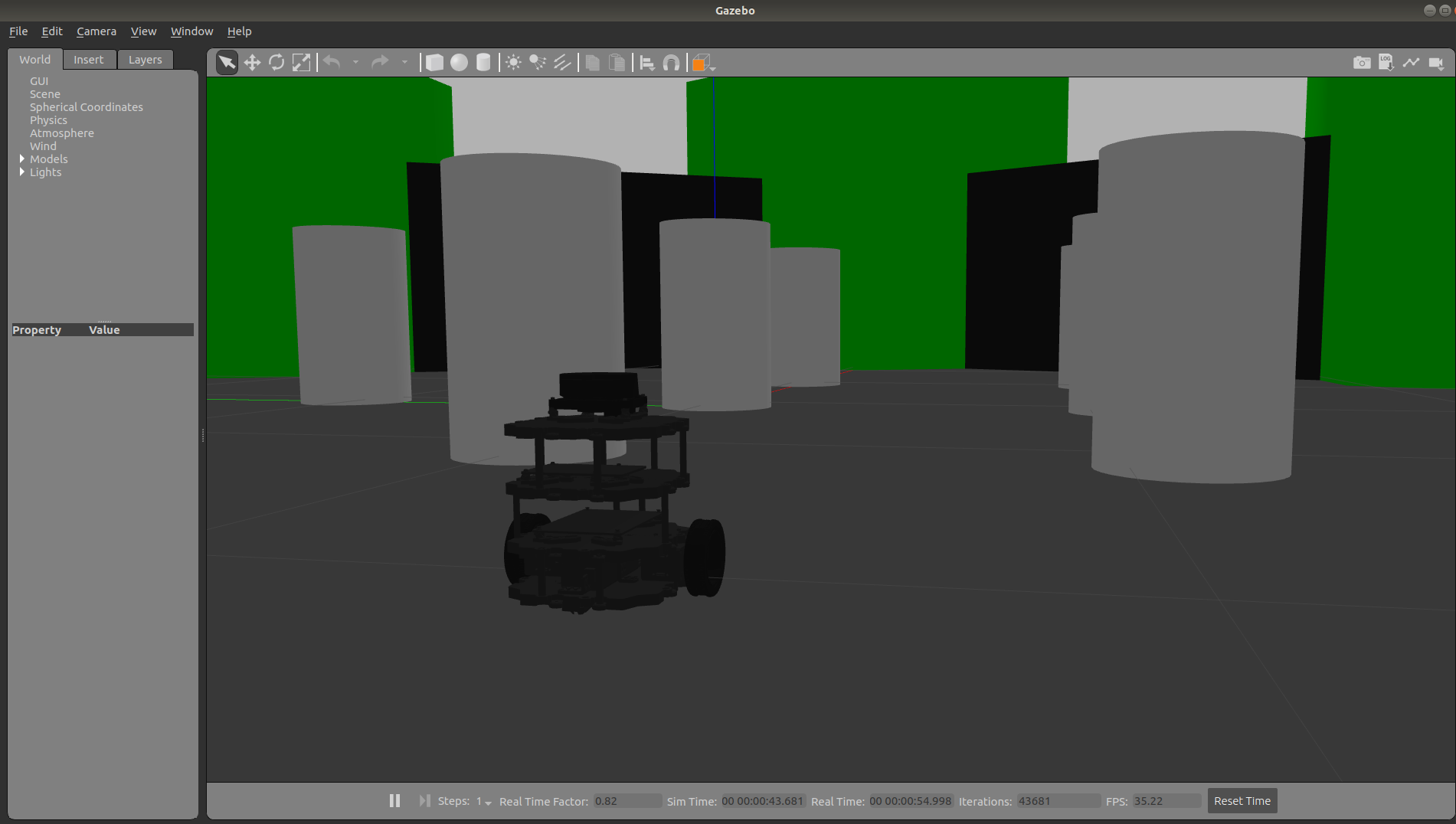
roslaunch turtlebot3_gazebo turtlebot3_world.launch
等待一会儿, 看, 我们的TurtleBot3 Burger和一些障碍物出现了:
最后我们把"export TURTLEBOT3_MODEL=burger"添加到.bashrc文件, 免得每次重新设置这个变量:
echo "export TURTLEBOT3_MODEL=burger" >> ~/.bashrc
此文原创禁止转载,转载文章请联系博主并注明来源和出处,谢谢!
作者: Raina_RLN https://www.cnblogs.com/raina/
Ubuntu 18.04 + ROS Melodic + TurtleBot3仿真的更多相关文章
- Ubuntu 18.04 安装ROS 配置环境 没有那个文件或目录的解决办法
Ubuntu 18.04版本,在安装ROS时运行 source ~/.bashrc 命令时出现没有那个文件夹或目录 或 No such file or directory的错误 在经过一番查询后发现 ...
- Ubuntu 16.04 + ROS Kinetic 机器人操作系统学习镜像分享与使用安装说明
Ubuntu 16.04 + ROS Kinetic 镜像分享与使用安装说明 内容概要:1 网盘文件介绍 2 镜像制作 3 系统使用与安装 ---- 祝ROS爱好者和开发者新年快乐:-) ---- ...
- Ubuntu 18.04 LTS修改 国内源(以中科大源为例)
国内有很多Ubuntu的镜像源,包括阿里的.网易的,还有很多教育网的源,比如:清华源.中科大源. 我们这里以中科大的源为例讲解如何修改Ubuntu 18.04里面默认的源. 可以进入这个链接进行下载: ...
- Ubuntu 18.04 启动root账号并授权远程登录
Ubuntu 18.04 刚刚上市2个月,下载安装,尝尝鲜~ 安装界面看上去舒服许多, 安装的速度也较之前17.04 和16.04 都快了许多.抱歉,未截图. Ubuntu 安装完成后默认不启动roo ...
- Ubuntu 18.04编译AOSP源码
总结一下我从Ubuntu 18.04下编译成功AOSP的过程,以及遇到的坑 我的电脑配置: OS: Ubuntu 18.04 bionic Kernel: x86_64 Linux 4.18.0-17 ...
- Ubuntu 18.04.1 LTS + kolla-ansible 部署 openstack Rocky all-in-one 环境
1. kolla 项目介绍 简介 kolla 的使命是为 openstack 云平台提供生产级别的.开箱即用的自动化部署能力. kolla 要实现 openetack 部署分为两步,第一步是制作 do ...
- Ubuntu 18.04中截图工具Shutter的编辑按钮不可用的解决办法
Shutter是一个由第三方提供的在Ubuntu上运行的截图工具,相对于系统自带的截图工具(默认可通过Ctrl + Shift + Print快捷键启动截图),最大的优点就是可以即时对图片进行编辑,在 ...
- 在Ubuntu 18.04系统上安装Systemback的方法(抄)
在Ubuntu 18.04系统上安装Systemback的方法 2018-12-26 21:39:05作者:林莉稿源:云网牛站 本文介绍如何在Ubuntu 18.04或者Ubuntu 18.10系统上 ...
- Ubuntu 18.04 记录
登录后死机,关机时死机的解决方法 更新内核并安装 Nvidia 显卡驱动可解决. 在内核更新为 4.15.18,Nvidia 显卡驱动为 390 时,问题解决. 使用 LiveCD 启动,然后 mou ...
随机推荐
- saltStack_template
模版使用 新建文件:vim dns.sls vim file/resolv.conf 执行 : [root@server_client base]# salt \* state.sls dns ...
- js中的数据类型及常用属性和方法
JavaScript 字符串 字符串(或文本字符串)是一串字符(比如 "Bill Gates").字符串被引号包围.您可使用单引号或双引号您可以在字符串内使用引号,只要这些引号与包 ...
- H3C 显示RIP当前运行状态及配置信息
- 设置html各元素不可点击(持续更新)
1.span <span id="nextStep" onclick="right">下一页</span> $("#nextS ...
- H3C 衡量路由协议的主要指标
- java Eclipse的使用技巧
eclipse与myeclipse的关系(都属于java开发的工具): 后者是前者的一个插件,后来为了方便使用,myeclipse集合了eclipse,后者是收费的. 可大部分人都是用 eclipse ...
- 【HTML/CSS】BFC
块格式化上下文(Block formatting contexts) BFC是什么? 是Web页面中盒模型布局的CSS渲染模式.它的定位体系属于常规文档流. 至少满足条件之一: float 的值不为 ...
- H3C查看系统启动配置文件
- HDU - 3530 Subsequence (单调队列)
Subsequence Time Limit: 2000/1000 MS (Java/Others) Memory Limit: 65536/32768 K (Java/Others)Total ...
- Nutch网页抓取速度优化
Nutch网页抓取速度优化 Here are the things that could potentially slow down fetching 1) DNS setup 2) The numb ...