S03_CH10_DMA_4_Video_Stitch视频拼接系统
S03_CH10_DMA_4_Video_Stitch视频拼接系统
10.1概述
注意:本课程和上一课程《S03_CH09_DMA_4_Video_Switch视频切换系统》基本相同,不同部分用紫色字体或者框图注明。
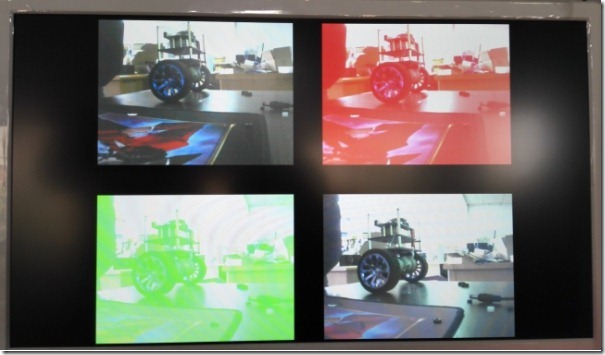
PL通过 OV7725 OV7725 实时 采集 1路 64 0×480 0×480 视频,分别将原始彩色、 视频,分别将原始彩色、 R分量、 G分量、 B分量作为常量输出,实现背景为红、绿、蓝 视频共4路视频通过4个独立的AXI DMA IP核传输至PS的DDR中进行缓存,然后再通过AXIDMA将4路视频同时从DDR读出,通过PL在VGA显示器上以1080P分辨率同时显示4路原始分辨率拼接而成的视频。
10.2修改OV_Sensor_ML摄像头采集IP
由于MIZ702开发板只有1路摄像头视频输入接口,MIZ701N和MIZ702N只有2路视频输入接口,无法满足演示4路视频输入的接口需求,因此修改OV_Sensor_ML ip 使之输出4路数据通路。修改的代码如下:
表10-2-1:
|
module OV_Sensor_ML( input CLK_i, //---------------------------- CMOS sensor hardware interface --------------------------/ input cmos_vsync_i, //cmos vsync input cmos_href_i, //cmos hsync refrence input cmos_pclk_i, //cmos pxiel clock output cmos_xclk_o, //cmos externl clock input[7:0] cmos_data_i, //cmos data output hs_o,//hs signal. output vs_o,//vs signal. // output de_o,//data enable. output [23:0] rgb_o1,//data output, output [23:0] rgb_o2,//data output, output [23:0] rgb_o3,//data output, output [23:0] rgb_o4,//data output, output vid_clk_ce ); //----------------------视频输出解码模块---------------------------// wire [15:0]rgb_o_r; assign rgb_o1 = {rgb_o_r[4:0],3'd0 ,rgb_o_r[10:5],2'd0,rgb_o_r[15:11],3'd0}; assign rgb_o2 = {5'b11111 ,3'd0 ,rgb_o_r[10:5],2'd0,rgb_o_r[15:11],3'd0}; assign rgb_o3 = {rgb_o_r[4:0],3'd0 ,rgb_o_r[10:5],2'd0,5'b11111 ,3'd0}; assign rgb_o4 = {rgb_o_r[4:0],3'd0 ,6'b111111 ,2'd0,rgb_o_r[15:11],3'd0}; reg [7:0]cmos_data_r; reg cmos_href_r; reg cmos_vsync_r; always@(posedge cmos_pclk_i) begin cmos_data_r <= cmos_data_i; cmos_href_r <= cmos_href_i; cmos_vsync_r<= cmos_vsync_i; end //assign rgb_o = 24'b11111111_00000000_11111111; cmos_decode cmos_decode_u0( //system signal. .cmos_clk_i(CLK_i),//cmos senseor clock. .rst_n_i(RESETn_i2c),//system reset.active low. //cmos sensor hardware interface. .cmos_pclk_i(cmos_pclk_i),//(cmos_pclk),//input pixel clock. .cmos_href_i(cmos_href_r),//(cmos_href),//input pixel hs signal. .cmos_vsync_i(cmos_vsync_r),//(cmos_vsync),//input pixel vs signal. .cmos_data_i(cmos_data_r),//(cmos_data),//data. .cmos_xclk_o(cmos_xclk_o),//(cmos_xclk),//output clock to cmos sensor. //user interface. .hs_o(hs_o),//hs signal. .vs_o(vs_o),//vs signal. // .de_o(de_o),//data enable. .rgb565_o(rgb_o_r),//data output .vid_clk_ce(vid_clk_ce) ); count_reset_v1#( .num(20'hffff0) )( .clk_i(CLK_i), .rst_o(RESETn_i2c) ); |
修改后代码为的为OV_Sensor_ML.v上表中红色字体部分,可以看出,代码之作了简单修改,增加了3路数据输出,为了让数据颜色有对比,第一路保持原始图像数据颜色,剩余三路增加了颜色背景。这样在做切换测试的时候就可以看到不同的通路变化了。
当然对于MIZ701N和MIZ702N可以使用2个OV_Sensor_ML接2个摄像头,每个模块出来2个数据通道就可以了。如果要接4个摄像头,可以购买我们的外扩摄像头模块再扩展2路摄像头就可以实现4路摄像头了。
10.3搭建硬件系统
10.3.1系统图
完成了IP的修改后,下面就可以搭建硬件系统了,由于VIVADO采用了图形化设计,带来了很大便捷。下面分别把MIZ702的系统构架图贴出来。
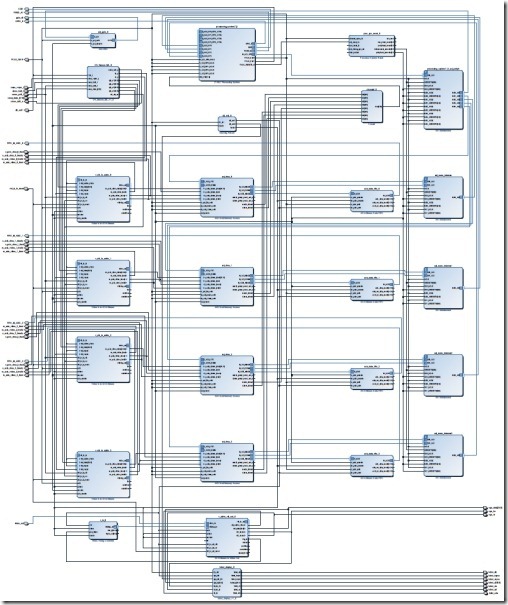
由于图片太大,只能看到大概的框架,大家学习的时候可以打开工程放大后去阅读,这里为了分析的时候方便把局部视图放大截图。
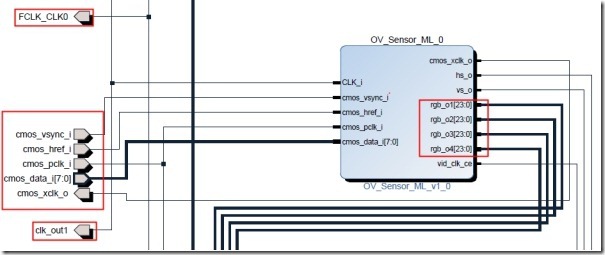
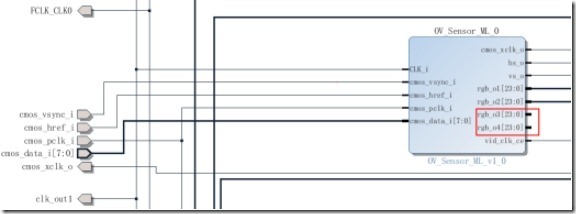
10.3.2 OV_Sensor_ML IP接线图
下图中主要是前面我们自定义OV_Sensor_ML采集IP修改后的图形界面。可以看到多出了rgb_o1、rgb_o2、rgb_o3、rgb_o4接口这样我们就虚拟了4路摄像头数据输入接口啦。OV_Sensor_ML前天的信号还是不变。下图中,还有2个信号分别是FCLK_CLK0和clk_out1他们分别是VID_IN IP和VID_OUT IP相关的时钟,把它们引出去到顶层模块中,后面需要使用到。
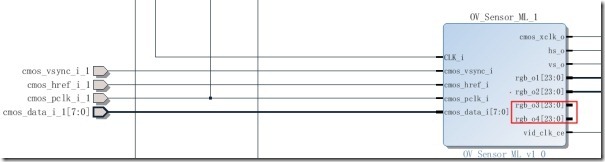
当然对于MIZ701N和MIZ702N可接2路摄像头的,那么这个模块只要接出2个通道就可以了,并且使用2个这样的模块。如下图是MIZ702N和MIZ701N连接2路摄像头。这里是链接了rbg_o1和rgb_o2。
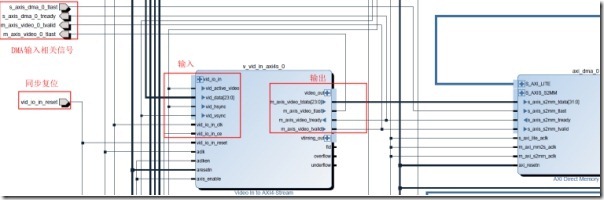
10.3.3 vid_in IP的接线图
下图大家可以放大后观看,vid_in IP的输入接口是连接到摄像头采样输出IP的。vid_in IP的输出接口是和和DMA链接了。DMA输入相关的信号被引出到外部,用来添加FPGA代码实现写DMA时序。还有一个vid_io_reset信号,是用来控制所有vid_in 和vid_out IP的同步,也是连接到外部,用FPGA代码控制。
10.3.4 DMA 和FIFO通路
下图是 DMA和data fifo的链接通路。
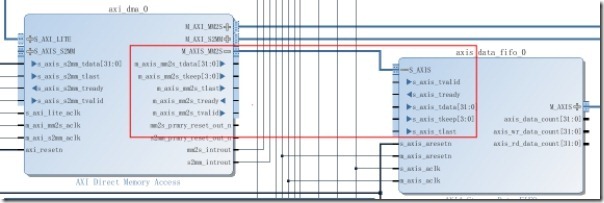
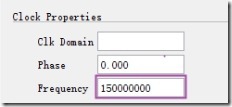
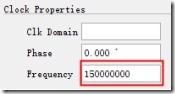
上图中data fifo 的M_AXIS将被引出到外部受FPGA代码控制。如下图,FIFO_M_AXIS_0就是连接到axis_data_fifo_0的M_AXIS接口的。双击此接口需要设置时钟,这里的数据速度时钟是150MHZ(MIZ701N是标准的148.5MHZ) 。不同的分辨率应当设置对应的分辨率时钟。

10.3.5 vid_out IP的通路
输出部分可以看到vid_out输出的是VGA时序信号,在VGA时序信号上,我们还挂载了一个VGA转HMDI的IP实现了HDMI和VGA同时输出(MIZ701N没有VGA所以无需把VGA信号,引出去)
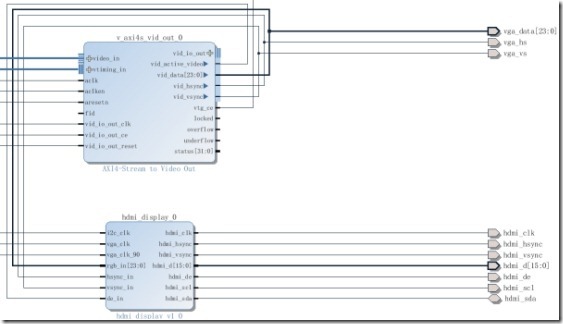
上图中的vid out IP数据输入通道如图所示
双击这个接口也要设置时钟频率,由于输出像素为1920X108060HZ因此为15000000HZ(MIZ701N是标准的148500000)
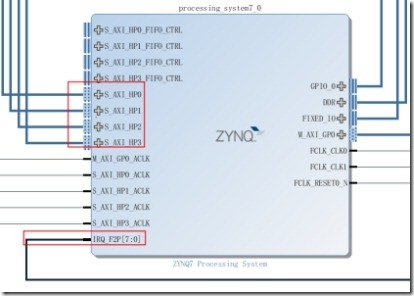
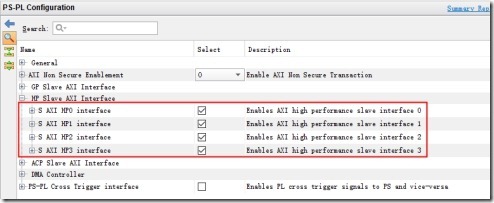
10.3.6 AXI HP通道和DMA中断
由于是四路视频输入,外接了4个DMA模块因此使用了4个HP和8个DMA中断如图
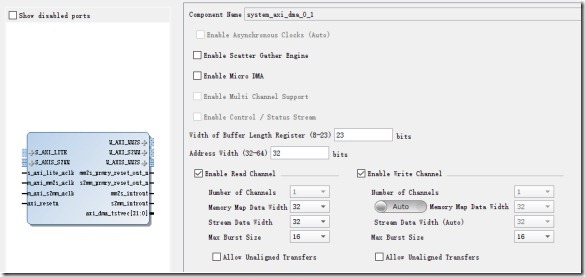
10.3.7 DMA IP的设置
下图中,同时勾选读通道和写通道,另外设置,Wideh of buffer length register 为23bit 这个含义是2的23次方8,388,607bytes 8M大小。一副1080P的图像大小为 1920X1080//1024/1024*4=7.9M因此一次DMA就可以传输一副1080P的图像。
10.3.7 时钟管理模块
时钟管理模块前面已经讲过了,1920X1080的分辨率是设置150MHZ(MIZ701N是148.5MHZ),不在具体累述。
10.3.8 VTC 图像时序发生模块
VTC图像时序发生模块的使用只要配置对应的分辨率,这里是设置640X480的分辨率,前面章节已经讲过不再累述。
10.4 FPGA 四路输入以及图像拼接源码分析
10.4.1 图像常量参数
表10-4-1
|
localparam MONITOR_HEIGHT = 11'd1080;//设置输出行分辨率 localparam MONITOR_WIDTH = 11'd1920;//设置输出列分辨率 localparam VIDEO_HEIGHT = 11'd480;//设置输入视频行分辨率 localparam VIDEO_WIDTH = 11'd640;//设置输入视频列分辨率 localparam GAP_HEIGHT = 11'd100;//设置四副图形中间的空白尺寸高度 localparam GAP_WIDTH = 11'd100;//设置四副图形中间的空白尺寸宽度 localparam BLACK_HEIGHT = (MONITOR_HEIGHT - 2 * VIDEO_HEIGHT - GAP_HEIGHT) >> 1;//上下边框高度 BLACK_HEIGHT = 10 localparam BLACK_WIDTH = (MONITOR_WIDTH - 2 * VIDEO_WIDTH - GAP_WIDTH) >> 1;//左右边框宽度 BLACK_WIDTH =270 localparam CH01_V_START = BLACK_HEIGHT;//第一路图像垂直开始 CH01_V_START = 10 localparam CH01_V_END = BLACK_HEIGHT + VIDEO_HEIGHT;//第一路图像垂直结束 CH01_V_END=490 localparam CH23_V_START = BLACK_HEIGHT + VIDEO_HEIGHT + GAP_HEIGHT;//第二路图像垂直开始 CH23_V_START=590 localparam CH23_V_END = BLACK_HEIGHT + VIDEO_HEIGHT + GAP_HEIGHT + VIDEO_HEIGHT;//第二路图像垂直结束 CH23_V_END= 1070 localparam CH02_H_START = BLACK_WIDTH;//第一路图像水平开始 CH02_H_START=270 localparam CH02_H_END = BLACK_WIDTH + VIDEO_WIDTH;//第一路图像水平结束CH02_H_END=910 localparam CH13_H_START = BLACK_WIDTH + VIDEO_WIDTH + GAP_WIDTH;//第二路图像水平开始1010 localparam CH13_H_END = BLACK_WIDTH + VIDEO_WIDTH + GAP_WIDTH + VIDEO_WIDTH;第二路图像水平结束//1550 |
以上代码是对图像的输出分辨率,被拼接图像的分辨率、空白、边框、背景进行设置。
10.4.2 DMA 4路视频输入的FPGA代码
|
always@(posedge FCLK_CLK0) begin if(!gpio_rtl_tri_o_0) v_cnt_0 <= 11'd0; else if(m_axis_video_0_tvalid & s_axis_dma_0_tready & m_axis_video_0_tlast) if(v_cnt_0 != 11'd479) v_cnt_0 <= v_cnt_0 + 1'b1; else v_cnt_0 <= 11'd0; else v_cnt_0 <= v_cnt_0; end |
表10-4-2-1
上表可以看到gpio_rtl_tri_o_0就是可编程的复位信号,可以用C代码控制同步时序。上表的代码实现的是视频通路0的vs 行计数器。可以看出来计数器在m_axis_video_0_tvalid (vid in输出数据有效)、 s_axis_dma_0_tready(DMA通道准备好) 、m_axis_video_0_tlast (vid_in 行结束信号)都有效的时候累加1。这里的分辨率是640X480因此累计一共480行数据。由于使用了4个输入输入通道,因此vs 行计数器的完成代码如下表。
表10-4-2-2
|
always@(posedge FCLK_CLK0) begin if(!gpio_rtl_tri_o_0) v_cnt_0 <= 11'd0; else if(m_axis_video_0_tvalid & s_axis_dma_0_tready & m_axis_video_0_tlast) if(v_cnt_0 != 11'd479) v_cnt_0 <= v_cnt_0 + 1'b1; else v_cnt_0 <= 11'd0; else v_cnt_0 <= v_cnt_0; end always@(posedge FCLK_CLK0) begin if(!gpio_rtl_tri_o_0) v_cnt_1 <= 11'd0; else if(m_axis_video_1_tvalid & s_axis_dma_1_tready & m_axis_video_1_tlast) if(v_cnt_1 != 11'd479) v_cnt_1 <= v_cnt_1 + 1'b1; else v_cnt_1 <= 11'd0; else v_cnt_1 <= v_cnt_1; end always@(posedge FCLK_CLK0) begin if(!gpio_rtl_tri_o_0) v_cnt_2 <= 11'd0; else if(m_axis_video_2_tvalid & s_axis_dma_2_tready & m_axis_video_2_tlast) if(v_cnt_2 != 11'd479) v_cnt_2 <= v_cnt_2 + 1'b1; else v_cnt_2 <= 11'd0; else v_cnt_2 <= v_cnt_2; end always@(posedge FCLK_CLK0) begin if(!gpio_rtl_tri_o_0) v_cnt_3 <= 11'd0; else if(m_axis_video_3_tvalid & s_axis_dma_3_tready & m_axis_video_3_tlast) if(v_cnt_3 != 11'd479) v_cnt_3 <= v_cnt_3 + 1'b1; else v_cnt_3 <= 11'd0; else v_cnt_3 <= v_cnt_3; end |
下表是s_axis_dma_0_tlast、s_axis_dma_1_tlast、s_axis_dma_2_tlast、s_axis_dma_3_tlast代表每个通道一副图像传输完成后的last 信号。这个信号为高电平1个周期,提交一次DMA数据到DDR,并且会产生一次对应端口的中断信号。
表10-4-2-3
|
assign s_axis_dma_0_tlast = m_axis_video_0_tvalid & s_axis_dma_0_tready & m_axis_video_0_tlast &(v_cnt_0 == 11'd479); assign s_axis_dma_1_tlast = m_axis_video_1_tvalid & s_axis_dma_1_tready & m_axis_video_1_tlast &(v_cnt_1 == 11'd479); assign s_axis_dma_2_tlast = m_axis_video_2_tvalid & s_axis_dma_2_tready & m_axis_video_2_tlast &(v_cnt_2 == 11'd479); assign s_axis_dma_3_tlast = m_axis_video_3_tvalid & s_axis_dma_3_tready & m_axis_video_3_tlast &(v_cnt_3 == 11'd479); |
10.4.3 DMA 输出通道
表10-4-3-1
|
always@(posedge clk_out1) begin if(!gpio_rtl_tri_o_0) h_cnt <= 11'd0; else if(video_out_tvalid & video_out_tready) if(h_cnt != (MONITOR_WIDTH - 1'b1)) h_cnt <= h_cnt + 1'b1; else h_cnt <= 11'd0; else h_cnt <= h_cnt; end |
上表是vid out ip 输入数据部分的列计数器,一共有1920列。当video_out_tvalid(FIFO输出数据有效信号)和video_out_tready(vid out IP准备好接收数据信号)都为1的时候开始计数。
表10-4-3-2
|
always@(posedge clk_out1) begin if(!gpio_rtl_tri_o_0) v_cnt <= 11'd0; else if(video_out_tvalid & video_out_tready & (h_cnt == (MONITOR_WIDTH - 1'b1))) if(v_cnt != (MONITOR_HEIGHT - 1'b1)) v_cnt <= v_cnt + 1'b1; else v_cnt <= 11'd0; else v_cnt <= v_cnt; end |
上表是vid out IP 输入数据的行计数器,当video_out_tvalid (FIFO数据输出有效) video_out_tready (vid out 准备好接收数据信号)和h_cnt == 11'd1919 共计1920点(代表一行数据结束)行计数器v_cnt 加1。
|
always@(posedge clk_out1) begin if(!gpio_rtl_tri_o_0) channel_switch <= 3'd4; else if((v_cnt >= CH01_V_START) && (v_cnt < CH01_V_END)) if((h_cnt >= CH02_H_START) && (h_cnt < CH02_H_END)) channel_switch <= 3'd0; else if((h_cnt >= CH13_H_START) && (h_cnt < CH13_H_END)) channel_switch <= 3'd1; else channel_switch <= 3'd4; else if((v_cnt >= CH23_V_START) && (v_cnt < CH23_V_END)) if((h_cnt >= CH02_H_START) && (h_cnt < CH02_H_END)) channel_switch <= 3'd2; else if((h_cnt >= CH13_H_START) && (h_cnt < CH13_H_END)) channel_switch <= 3'd3; else channel_switch <= 3'd4; else channel_switch <= 3'd4; end |
表10-4-3-3
上表代码实现了视频在显示器上的拼接输出,有点类似前面的四路切换方案,区别是这次是把所有视频全部输出到1080P的显示器上了。
表10-4-3
|
assign video_out_tdata = (channel_switch == 3'd0) ? FIFO_M_AXIS_0_tdata[23:0] : ((channel_switch == 3'd1) ? FIFO_M_AXIS_1_tdata[23:0] : ((channel_switch == 3'd2) ? FIFO_M_AXIS_2_tdata[23:0] : ((channel_switch == 3'd3) ? FIFO_M_AXIS_3_tdata[23:0] : 24'd0))); assign video_out_tvalid = (channel_switch == 3'd0) ? FIFO_M_AXIS_0_tvalid : ((channel_switch == 3'd1) ? FIFO_M_AXIS_1_tvalid : ((channel_switch == 3'd2) ? FIFO_M_AXIS_2_tvalid : ((channel_switch == 3'd3) ? FIFO_M_AXIS_3_tvalid : 1'b1))); assign video_out_tuser = video_out_tvalid & video_out_tready & (h_cnt == 11'd0) & (v_cnt == 11'd0); assign video_out_tlast = (h_cnt == (MONITOR_WIDTH - 1'b1)) ? 1'b1 : 1'b0; assign FIFO_M_AXIS_0_tready = (channel_switch == 3'd0) ? video_out_tready : 1'b0; assign FIFO_M_AXIS_1_tready = (channel_switch == 3'd1) ? video_out_tready : 1'b0; assign FIFO_M_AXIS_2_tready = (channel_switch == 3'd2) ? video_out_tready : 1'b0; assign FIFO_M_AXIS_3_tready = (channel_switch == 3'd3) ? video_out_tready : 1'b0; |
上表中,video_out_tvalid 是代表了FIFO输出的有效数据的信号,通过channel_switch 切换到当前选定的FIFO valid 信号上。
上表中,video_out_tdata 是代表了FIFO输出的数据通道,通过channel_switch 切换到当前选定的FIFO数据通道。
上表中,video_out_tuser 是代表了vid out 一帧图像开始信号。每行从0开始第一个数据。当video_out_tvalid(FIFO 输出数据有效)、 video_out_tready(vid out 可以接收数据信号)、h_cnt==11’d0(第一行第一个数据)、v_cnt ==11’d0(一帧图像的第0行)都满足条件video_out_tuser输出1,告知vid_out IP 一帧图像开始。
上表中,video_out_tlast 代表了vid out 输入图像数据的最后一行最后一个数据,这里是1920X1080的图像,因此到1919,每一行最后一个数据都要输出 video_out_tlast 为1.
10.5 4路视频切换DMA C处理源码分析
10.5.4.1 main.c源码
表10-5-1 main.c
|
/* * * www.osrc.cn * www.milinker.com * copyright by nan jin mi lian dian zi www.osrc.cn` * axi dma test * */ #include "dma_intr.h" #include "sys_intr.h" #include "xgpio.h" volatile int TxDone0; volatile int TxDone1; volatile int TxDone2; volatile int TxDone3; volatile int RxDone0; volatile int RxDone1; volatile int RxDone2; volatile int RxDone3; volatile u8 tx0_buffer_index; volatile u8 rx0_buffer_index; volatile u8 tx1_buffer_index; volatile u8 rx1_buffer_index; volatile u8 tx2_buffer_index; volatile u8 rx2_buffer_index; volatile u8 tx3_buffer_index; volatile u8 rx3_buffer_index; volatile int Error; u32 *BufferPtr0[3]; u32 *BufferPtr1[3]; u32 *BufferPtr2[3]; u32 *BufferPtr3[3]; XAxiDma AxiDma0; XAxiDma AxiDma1; XAxiDma AxiDma2; XAxiDma AxiDma3; /************************** Variable Definitions *****************************/ static XScuGic Intc; //GIC static XGpio Gpio; #define AXI_GPIO_DEV_ID XPAR_AXI_GPIO_0_DEVICE_ID int init_intr_sys(void) { // initial DMA interrupt handle DMA_Intr_Init(&AxiDma0,XPAR_AXIDMA_0_DEVICE_ID); DMA_Intr_Init(&AxiDma1,XPAR_AXIDMA_1_DEVICE_ID); DMA_Intr_Init(&AxiDma2,XPAR_AXIDMA_2_DEVICE_ID); DMA_Intr_Init(&AxiDma3,XPAR_AXIDMA_3_DEVICE_ID); Init_Intr_System(&Intc); // initial DMA interrupt system Setup_Intr_Exception(&Intc); DMA_Setup_Intr_System(&Intc,&AxiDma0,TX0_INTR_ID,RX0_INTR_ID);//setup dma interrpt system DMA_Setup_Intr_System(&Intc,&AxiDma1,TX1_INTR_ID,RX1_INTR_ID);//setup dma interrpt system DMA_Setup_Intr_System(&Intc,&AxiDma2,TX2_INTR_ID,RX2_INTR_ID);//setup dma interrpt system DMA_Setup_Intr_System(&Intc,&AxiDma3,TX3_INTR_ID,RX3_INTR_ID);//setup dma interrpt system DMA_Intr_Enable(&Intc,&AxiDma0); DMA_Intr_Enable(&Intc,&AxiDma1); DMA_Intr_Enable(&Intc,&AxiDma2); DMA_Intr_Enable(&Intc,&AxiDma3); } int main(void) { int Status; XGpio_Initialize(&Gpio, AXI_GPIO_DEV_ID); XGpio_SetDataDirection(&Gpio, 1, 0); BufferPtr0[0] = (u32 *)CH0_BUFFER0_BASE; BufferPtr0[1] = (u32 *)CH0_BUFFER1_BASE; BufferPtr0[2] = (u32 *)CH0_BUFFER2_BASE; BufferPtr1[0] = (u32 *)CH1_BUFFER0_BASE; BufferPtr1[1] = (u32 *)CH1_BUFFER1_BASE; BufferPtr1[2] = (u32 *)CH1_BUFFER2_BASE; BufferPtr2[0] = (u32 *)CH2_BUFFER0_BASE; BufferPtr2[1] = (u32 *)CH2_BUFFER1_BASE; BufferPtr2[2] = (u32 *)CH2_BUFFER2_BASE; BufferPtr3[0] = (u32 *)CH3_BUFFER0_BASE; BufferPtr3[1] = (u32 *)CH3_BUFFER1_BASE; BufferPtr3[2] = (u32 *)CH3_BUFFER2_BASE; /* Initialize flags before start transfer test */ TxDone0 = 0; TxDone1 = 0; TxDone2 = 0; TxDone3 = 0; RxDone0 = 0; TxDone1 = 0; TxDone2 = 0; TxDone3 = 0; tx0_buffer_index = 0; rx0_buffer_index = 0; tx1_buffer_index = 0; rx1_buffer_index = 0; tx2_buffer_index = 0; rx2_buffer_index = 0; tx3_buffer_index = 0; rx3_buffer_index = 0; Error = 0; init_intr_sys(); Miz702_EMIO_init(); ov7725_init_rgb(); XGpio_DiscreteWrite(&Gpio, 1, 1); Status = XAxiDma_SimpleTransfer(&AxiDma0, (u32)BufferPtr0[tx0_buffer_index], MAX_PKT_LEN, XAXIDMA_DMA_TO_DEVICE); if (Status != XST_SUCCESS) { xil_printf("tx axi dma0 failed! %d\r\n", Status); return XST_FAILURE; } Status = XAxiDma_SimpleTransfer(&AxiDma1, (u32)BufferPtr1[tx1_buffer_index], MAX_PKT_LEN, XAXIDMA_DMA_TO_DEVICE); if (Status != XST_SUCCESS) { xil_printf("tx axi dma1 failed! %d\r\n", Status); return XST_FAILURE; } Status = XAxiDma_SimpleTransfer(&AxiDma2, (u32)BufferPtr2[tx2_buffer_index], MAX_PKT_LEN, XAXIDMA_DMA_TO_DEVICE); if (Status != XST_SUCCESS) { xil_printf("tx axi dma2 failed! %d\r\n", Status); return XST_FAILURE; } Status = XAxiDma_SimpleTransfer(&AxiDma3, (u32)BufferPtr3[tx3_buffer_index], MAX_PKT_LEN, XAXIDMA_DMA_TO_DEVICE); if (Status != XST_SUCCESS) { xil_printf("tx axi dma3 failed! %d\r\n", Status); return XST_FAILURE; } Status = XAxiDma_SimpleTransfer(&AxiDma0, (u32)BufferPtr0[rx0_buffer_index], MAX_PKT_LEN, XAXIDMA_DEVICE_TO_DMA); if (Status != XST_SUCCESS) { xil_printf("rx axi dma0 failed! %d\r\n", Status); return XST_FAILURE; } Status = XAxiDma_SimpleTransfer(&AxiDma1, (u32)BufferPtr1[rx1_buffer_index], MAX_PKT_LEN, XAXIDMA_DEVICE_TO_DMA); if (Status != XST_SUCCESS) { xil_printf("rx axi dma1 failed! %d\r\n", Status); return XST_FAILURE; } Status = XAxiDma_SimpleTransfer(&AxiDma2, (u32)BufferPtr2[rx2_buffer_index], MAX_PKT_LEN, XAXIDMA_DEVICE_TO_DMA); if (Status != XST_SUCCESS) { xil_printf("tx axi dma2 failed! %d\r\n", Status); return XST_FAILURE; } Status = XAxiDma_SimpleTransfer(&AxiDma3, (u32)BufferPtr3[rx3_buffer_index], MAX_PKT_LEN, XAXIDMA_DEVICE_TO_DMA); if (Status != XST_SUCCESS) { xil_printf("tx axi dma3 failed! %d\r\n", Status); return XST_FAILURE; } while (1) ; return XST_SUCCESS; } |
上表中的代码我们很熟悉了,这里是注册了4个DMA通道,8个中断(接收和发送4路)。
10.5.4.2 dma_intr.h源码
表10-5-2 dma_intr.h
|
/* * * www.osrc.cn * www.milinker.com * copyright by nan jin mi lian dian zi www.osrc.cn */ #ifndef DMA_INTR_H #define DMA_INTR_H #include "xaxidma.h" #include "xparameters.h" #include "xil_exception.h" #include "xdebug.h" #include "xscugic.h" /************************** Constant Definitions *****************************/ /* * Device hardware build related constants. */ #define RX_INTR_ID XPAR_FABRIC_AXI_DMA_0_S2MM_INTROUT_INTR #define TX_INTR_ID XPAR_FABRIC_AXI_DMA_0_MM2S_INTROUT_INTR #define IMAGE_WIDTH 640 #define IMAGE_HEIGHT 480 #define BYTES_PER_PIXEL 4 #define MAX_BUFFER_NUM 8 #define MEM_BASE_ADDR 0x10000000 #define DMA0_DEV_ID XPAR_AXIDMA_0_DEVICE_ID #define DMA1_DEV_ID XPAR_AXIDMA_1_DEVICE_ID #define DMA2_DEV_ID XPAR_AXIDMA_2_DEVICE_ID #define DMA3_DEV_ID XPAR_AXIDMA_3_DEVICE_ID #define RX0_INTR_ID XPAR_FABRIC_AXI_DMA_0_S2MM_INTROUT_INTR #define TX0_INTR_ID XPAR_FABRIC_AXI_DMA_0_MM2S_INTROUT_INTR #define RX1_INTR_ID XPAR_FABRIC_AXI_DMA_1_S2MM_INTROUT_INTR #define TX1_INTR_ID XPAR_FABRIC_AXI_DMA_1_MM2S_INTROUT_INTR #define RX2_INTR_ID XPAR_FABRIC_AXI_DMA_2_S2MM_INTROUT_INTR #define TX2_INTR_ID XPAR_FABRIC_AXI_DMA_2_MM2S_INTROUT_INTR #define RX3_INTR_ID XPAR_FABRIC_AXI_DMA_3_S2MM_INTROUT_INTR #define TX3_INTR_ID XPAR_FABRIC_AXI_DMA_3_MM2S_INTROUT_INTR #define CH0_BUFFER0_BASE (MEM_BASE_ADDR) #define CH0_BUFFER1_BASE (CH0_BUFFER0_BASE + IMAGE_WIDTH * IMAGE_HEIGHT * BYTES_PER_PIXEL) #define CH0_BUFFER2_BASE (CH0_BUFFER0_BASE + 2 * IMAGE_WIDTH * IMAGE_HEIGHT * BYTES_PER_PIXEL) #define CH1_BUFFER0_BASE (CH0_BUFFER0_BASE + MAX_BUFFER_NUM * IMAGE_WIDTH * IMAGE_HEIGHT * BYTES_PER_PIXEL) #define CH1_BUFFER1_BASE (CH1_BUFFER0_BASE + IMAGE_WIDTH * IMAGE_HEIGHT * BYTES_PER_PIXEL) #define CH1_BUFFER2_BASE (CH1_BUFFER0_BASE + 2 * IMAGE_WIDTH * IMAGE_HEIGHT * BYTES_PER_PIXEL) #define CH2_BUFFER0_BASE (CH1_BUFFER0_BASE + MAX_BUFFER_NUM * IMAGE_WIDTH * IMAGE_HEIGHT * BYTES_PER_PIXEL) #define CH2_BUFFER1_BASE (CH2_BUFFER0_BASE + IMAGE_WIDTH * IMAGE_HEIGHT * BYTES_PER_PIXEL) #define CH2_BUFFER2_BASE (CH2_BUFFER0_BASE + 2 * IMAGE_WIDTH * IMAGE_HEIGHT * BYTES_PER_PIXEL) #define CH3_BUFFER0_BASE (CH2_BUFFER0_BASE + MAX_BUFFER_NUM * IMAGE_WIDTH * IMAGE_HEIGHT * BYTES_PER_PIXEL) #define CH3_BUFFER1_BASE (CH3_BUFFER0_BASE + IMAGE_WIDTH * IMAGE_HEIGHT * BYTES_PER_PIXEL) #define CH3_BUFFER2_BASE (CH3_BUFFER0_BASE + 2 * IMAGE_WIDTH * IMAGE_HEIGHT * BYTES_PER_PIXEL) /* Timeout loop counter for reset */ #define RESET_TIMEOUT_COUNTER 10000 /* test start value */ #define TEST_START_VALUE 0xC /* * Buffer and Buffer Descriptor related constant definition */ #define MAX_PKT_LEN (IMAGE_WIDTH * IMAGE_HEIGHT * BYTES_PER_PIXEL) /* * transfer times */ #define NUMBER_OF_TRANSFERS 100000 extern volatile int TxDone0; extern volatile int TxDone1; extern volatile int TxDone2; extern volatile int TxDone3; extern volatile int RxDone0; extern volatile int RxDone1; extern volatile int RxDone2; extern volatile int RxDone3; extern volatile u8 tx0_buffer_index; extern volatile u8 rx0_buffer_index; extern volatile u8 tx1_buffer_index; extern volatile u8 rx1_buffer_index; extern volatile u8 tx2_buffer_index; extern volatile u8 rx2_buffer_index; extern volatile u8 tx3_buffer_index; extern volatile u8 rx3_buffer_index; extern volatile int Error; extern u32 *BufferPtr0[3]; extern u32 *BufferPtr1[3]; extern u32 *BufferPtr2[3]; extern u32 *BufferPtr3[3]; extern XAxiDma AxiDma0; extern XAxiDma AxiDma1; extern XAxiDma AxiDma2; extern XAxiDma AxiDma3; int DMA_CheckData(int Length, u8 StartValue); int DMA_Setup_Intr_System(XScuGic * IntcInstancePtr,XAxiDma * AxiDmaPtr, u16 TxIntrId, u16 RxIntrId); int DMA_Intr_Enable(XScuGic * IntcInstancePtr,XAxiDma *DMAPtr); int DMA_Intr_Init(XAxiDma *DMAPtr,u32 DeviceId); #endif |
上表中主要定义DMA用到的变量,每个DMA通道的地址分配,DMA通道对象的定义,以及DMA中断函数、DMA中断使能函数。
10.5.4.3 dma_intr.c中断接收源码
表10-5-4-3
|
/*****************************************************************************/ /* * * This is the DMA RX interrupt handler function * * It gets the interrupt status from the hardware, acknowledges it, and if any * error happens, it resets the hardware. Otherwise, if a completion interrupt * is present, then it sets the RxDone flag. * * @param Callback is a pointer to RX channel of the DMA engine. * * @return None. * * @note None. * ******************************************************************************/ static void DMA_RxIntrHandler(void *Callback) { u32 IrqStatus; int Status; XAxiDma *AxiDmaInst = (XAxiDma *)Callback; /* Read pending interrupts */ IrqStatus = XAxiDma_IntrGetIrq(AxiDmaInst, XAXIDMA_DEVICE_TO_DMA); /* Acknowledge pending interrupts */ XAxiDma_IntrAckIrq(AxiDmaInst, IrqStatus, XAXIDMA_DEVICE_TO_DMA); /* * If no interrupt is asserted, we do not do anything */ if (!(IrqStatus & XAXIDMA_IRQ_ALL_MASK)) { xil_printf("no interrupt! \r\n"); return; } /* * If error interrupt is asserted, raise error flag, reset the * hardware to recover from the error, and return with no further * processing. */ if ((IrqStatus & XAXIDMA_IRQ_ERROR_MASK)) { // Error = 1; xil_printf("rx error! \r\n"); /* Reset could fail and hang * NEED a way to handle this or do not call it?? */ // XAxiDma_Reset(AxiDmaInst); // TimeOut = RESET_TIMEOUT_COUNTER; // while (TimeOut) { // if(XAxiDma_ResetIsDone(AxiDmaInst)) { // break; // } // TimeOut -= 1; // } return; } /* * If completion interrupt is asserted, then set RxDone flag */ if ((IrqStatus & XAXIDMA_IRQ_IOC_MASK)) { if(AxiDmaInst == &AxiDma0) { RxDone0++; if(rx0_buffer_index == 2) rx0_buffer_index = 0; else rx0_buffer_index++; Status = XAxiDma_SimpleTransfer(&AxiDma0, (u32)BufferPtr0[rx0_buffer_index], MAX_PKT_LEN, XAXIDMA_DEVICE_TO_DMA); if (Status != XST_SUCCESS) { xil_printf("rx axi dma0 failed! 0 %d\r\n", Status); return; } } else if(AxiDmaInst == &AxiDma1) { RxDone1++; if(rx1_buffer_index == 2) rx1_buffer_index = 0; else rx1_buffer_index++; Status = XAxiDma_SimpleTransfer(&AxiDma1, (u32)BufferPtr1[rx1_buffer_index], MAX_PKT_LEN, XAXIDMA_DEVICE_TO_DMA); if (Status != XST_SUCCESS) { xil_printf("rx axi dma1 failed! 0 %d\r\n", Status); return; } } else if(AxiDmaInst == &AxiDma2) { RxDone2++; if(rx2_buffer_index == 2) rx2_buffer_index = 0; else rx2_buffer_index++; Status = XAxiDma_SimpleTransfer(&AxiDma2, (u32)BufferPtr2[rx2_buffer_index], MAX_PKT_LEN, XAXIDMA_DEVICE_TO_DMA); if (Status != XST_SUCCESS) { xil_printf("rx axi dma2 failed! 0 %d\r\n", Status); return; } } else if(AxiDmaInst == &AxiDma3) { RxDone3++; if(rx3_buffer_index == 2) rx3_buffer_index = 0; else rx3_buffer_index++; Status = XAxiDma_SimpleTransfer(&AxiDma3, (u32)BufferPtr3[rx3_buffer_index], MAX_PKT_LEN, XAXIDMA_DEVICE_TO_DMA); if (Status != XST_SUCCESS) { xil_printf("rx axi dma3 failed! 0 %d\r\n", Status); return; } } else xil_printf("error!\r\n"); } } |
上表中和单独DMA视频的却别就是通过AxiDmaInst 判断当前DMA输入的通路,来确定当前输入当道下一次接收的数据需要保存到的BUFFER地址。
表9-5-4-3 dma_intr.c源码
10.5.4.4 dma_intr.c中断发送源码
表10-5-4-4
|
/*****************************************************************************/ /* * * This is the DMA TX Interrupt handler function. * * It gets the interrupt status from the hardware, acknowledges it, and if any * error happens, it resets the hardware. Otherwise, if a completion interrupt * is present, then sets the TxDone.flag * * @param Callback is a pointer to TX channel of the DMA engine. * * @return None. * * @note None. * ******************************************************************************/ static void DMA_TxIntrHandler(void *Callback) { u32 IrqStatus; int Status; XAxiDma *AxiDmaInst = (XAxiDma *)Callback; /* Read pending interrupts */ IrqStatus = XAxiDma_IntrGetIrq(AxiDmaInst, XAXIDMA_DMA_TO_DEVICE); /* Acknowledge pending interrupts */ XAxiDma_IntrAckIrq(AxiDmaInst, IrqStatus, XAXIDMA_DMA_TO_DEVICE); /* * If no interrupt is asserted, we do not do anything */ if (!(IrqStatus & XAXIDMA_IRQ_ALL_MASK)) { xil_printf("no interrupt! \r\n"); return; } /* * If error interrupt is asserted, raise error flag, reset the * hardware to recover from the error, and return with no further * processing. */ if ((IrqStatus & XAXIDMA_IRQ_ERROR_MASK)) { //Error = 1; xil_printf("tx error! \r\n"); // /* // * Reset should never fail for transmit channel // */ // XAxiDma_Reset(AxiDmaInst); // // TimeOut = RESET_TIMEOUT_COUNTER; // // while (TimeOut) { // if (XAxiDma_ResetIsDone(AxiDmaInst)) { // break; // } // // TimeOut -= 1; // } return; } /* * If Completion interrupt is asserted, then set the TxDone flag */ if ((IrqStatus & XAXIDMA_IRQ_IOC_MASK)) { if(AxiDmaInst == &AxiDma0) { TxDone0++; if(rx0_buffer_index == 0) tx0_buffer_index = 2; else tx0_buffer_index = rx0_buffer_index - 1; Status = XAxiDma_SimpleTransfer(&AxiDma0, (u32)BufferPtr0[tx0_buffer_index], MAX_PKT_LEN, XAXIDMA_DMA_TO_DEVICE); if (Status != XST_SUCCESS) { xil_printf("tx axi dma0 failed! 0 %d\r\n", Status); return; } } else if(AxiDmaInst == &AxiDma1) { TxDone1++; if(rx1_buffer_index == 0) tx1_buffer_index = 2; else tx1_buffer_index = rx1_buffer_index - 1; Status = XAxiDma_SimpleTransfer(&AxiDma1, (u32)BufferPtr1[tx1_buffer_index], MAX_PKT_LEN, XAXIDMA_DMA_TO_DEVICE); if (Status != XST_SUCCESS) { xil_printf("tx axi dma1 failed! 0 %d\r\n", Status); return; } } else if(AxiDmaInst == &AxiDma2) { TxDone2++; if(rx2_buffer_index == 0) tx2_buffer_index = 2; else tx2_buffer_index = rx2_buffer_index - 1; Status = XAxiDma_SimpleTransfer(&AxiDma2, (u32)BufferPtr2[tx2_buffer_index], MAX_PKT_LEN, XAXIDMA_DMA_TO_DEVICE); if (Status != XST_SUCCESS) { xil_printf("tx axi dma2 failed! 0 %d\r\n", Status); return; } } else if(AxiDmaInst == &AxiDma3) { TxDone3++; if(rx3_buffer_index == 0) tx3_buffer_index = 2; else tx3_buffer_index = rx3_buffer_index - 1; Status = XAxiDma_SimpleTransfer(&AxiDma3, (u32)BufferPtr3[tx3_buffer_index], MAX_PKT_LEN, XAXIDMA_DMA_TO_DEVICE); if (Status != XST_SUCCESS) { xil_printf("tx axi dma3 failed! 0 %d\r\n", Status); return; } } else xil_printf("error!\r\n"); } } |
上表的发送中断函数,和接收中断函数处理机制一致,也是通过AxiDmaInst 判断当前DMA的通道,并且为当前DMA通道发送数据,指定对应的 BUFFER。
10.6测试结果
S03_CH10_DMA_4_Video_Stitch视频拼接系统的更多相关文章
- 开源倾情奉献:基于.NET打造IP智能网络视频监控系统(一)开放源代码
本文为 Dennis Gao 原创技术文章,发表于博客园博客,未经作者本人允许禁止任何形式的转载. 开源倾情奉献系列链接 开源倾情奉献:基于.NET打造IP智能网络视频监控系统(一)开放源代码 开源倾 ...
- 基于SURF特征的图像与视频拼接技术的研究和实现(一)
基于SURF特征的图像与视频拼接技术的研究和实现(一) 一直有计划研究实时图像拼接,但是直到最近拜读西电2013年张亚娟的<基于SURF特征的图像与视频拼接技术的研究和实现>,条 ...
- 基于.NET打造IP智能网络视频监控系统
开源倾情奉献:基于.NET打造IP智能网络视频监控系统(一)开放源代码 开源倾情奉献系列链接 开源倾情奉献:基于.NET打造IP智能网络视频监控系统(一)开放源代码 开源倾情奉献:基于.NET打造 ...
- VSAM:视频监控系统 A System for Video Surveillance and Monitoring
VSAM(VideoSurveillance and Monitoring)视频监控系统 Robotics Institute CMU 1:引言 2:试验床介绍 3:基本的视频分析算法:运动目标检测, ...
- 2个YUV视频拼接技术
http://blog.csdn.net/huahuahailang/article/details/9040847 2个YUV视频拼接技术 http://zhongcong386.blog.163. ...
- [视频]mac系统下虚拟机parallels安装ubuntu 14.04视频教程
此文是http://www.mr-wu.cn/install-ubuntu-14-04-on-parallels-for-mac/这篇博文的补充,为整个ubuntu 14.04安装过程的视频录像. m ...
- EasySwoole+ElasticSearch打造 高性能 小视频服务系统
EasySwoole+ElasticSearch打造高性能小视频服务 第1章 课程概述 第2章 EasySwoole框架快速上手 第3章 性能测试 第4章 玩转高性能消息队列服务 第5章 小视频服务平 ...
- 轻松构建基于 Serverless 架构的弹性高可用音视频处理系统
前言 随着计算机技术和 Internet 的日新月异,视频点播技术因其良好的人机交互性和流媒体传输技术倍受教育.娱乐等行业青睐,而在当前, 云计算平台厂商的产品线不断成熟完善, 如果想要搭建视频点播类 ...
- Qt编写安防视频监控系统(界面很漂亮)
一.前言 视频监控系统在整个安防领域,已经做到了烂大街的程序,全国起码几百家公司做过类似的系统,当然这一方面的需求量也是非常旺盛的,各种定制化的需求越来越多,尤其是这几年借着人脸识别的东风,发展更加迅 ...
随机推荐
- elasticsearch java插入索引批量操作
1.单条所以插入//第一个参数:索引名:第二个参数:索引类型:第三个参数:索引ID(相同的id时修改数据,默认为随机字符串)IndexResponse indexResponse = client.p ...
- js的一些笔试面试题
1. 判断字符串是否是这样组成的,第一个必须是字母,后面可以是字母.数字.下划线,总长度为5-20 var reg = /^[a-zA-Z][a-zA-Z_0-9]{4,19}$/; reg.test ...
- keras Model 1 入门篇
1 入门 2 多个输入和输出 3 共享层 最近在学习keras,它有一些实现好的特征提取的模型:resNet.vgg.而且是带权重的.用来做特诊提取比较方便 首先要知道keras有两种定义模型的方式: ...
- OpenNebula概述
OpenNebula概述 OpenNebula是专门为云计算打造的开源系统,用户可以使用Xen.KVM.VMware等虚拟化软件一起打造企业云.利用OpenNebula可以轻松构建私有云.混合云.公开 ...
- Linux怎样设置tomcat自启动
--未验证 越来越多的人把tomcat部署在Linux下,但是linux下必须用命令才能启动tomcat,如果同一个服务器下tomcat部署几个的话,每次启动就很繁琐,能不能设置在linux系统启动时 ...
- 使用java自带线程池
java提供自带的线程池,而不需要自己去开发一个自定义线程池了. 线程池类ThreadPoolExecutor在包java.util.concurrent下 ThreadPoolExecutor ...
- iReport报表生成html,pdf,xls,word工具类
package com.report; import java.io.ByteArrayOutputStream;import java.io.File;import java.io.InputStr ...
- 一百四十六:CMS系统之帖子按照发布时间和评论数量排序
按照不同选项进行排序 视图 @bp.route('/')def index(): board_id = request.args.get('board_id', type=int, default=N ...
- 一百四十:CMS系统之使用flask-paginate实现分页功能
官方文档:https://pythonhosted.org/Flask-paginate/ 安装:pip install flask-paginate 在没有分页的情况下,默认会加载所有内容 在con ...
- python面试必备-基础篇
一.python中and, or, and-or语法 1.and 有假先出假 在Python 中,and 和 or 执行布尔逻辑演算,如你所期待的一样,但是它们并不返回布尔值:而是,返回它们实际进 ...