三轴陀螺仪与加速度计如何辅助 iPhone 定位的
在所有之前解释一下陀螺仪
根据Wiki的定义:「陀螺仪是用于测量角度或维持方向的设备,基于角动量守恒原理。」
这句话的要点是测量角度或维持方向,这是 iPhone 4 为何搭载此类设备的原因。机械陀螺仪–例如下面这只–中间有一转盘,用以侦测方向的改变。iPhone 4 采用了微型的,电子化的振动陀螺仪,也叫微机电陀螺仪。这东西应该就是这个样子一个东西(下图),看起来很像手表里的一个机密零件!
三轴陀螺仪工作原理
注意上图的中间是一个高速旋转的金黄颜色的转子,由于惯性作用它是不会受到外力的影响而改变姿态的,而周边的设备的任何姿态的改变就可以检测出来,用来判别物体在各个方向上旋转的角度。
这里插一句,大家小时候玩过陀螺的,知道在一定的速度下,就能一直保持一个竖直的方向。
三轴陀螺仪最大的作用就是“测量角速度,以判别物体的运动状态,所以也称为运动传感器“,换句话说,这东西可以让我们的iPhone知道自己”在哪儿和去哪儿“(where they are or where they’re going)。
加速传感器
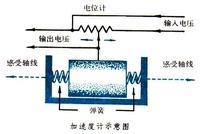
加速度计是惯性导航和惯性制导系统的基本测量元件之一,加速度计本质上是一个振荡系统,安装于运动载体的内部,可以用来测量载体的运动加速度。
MEMS类加速度计的工作原理是当加速度计连同外界物体(该物体的加速度就是待测的加速度)一起作加速运动时,质量块就受到惯性力的作用向相反的方向运动。质量块发生的位移受到弹簧和阻尼器的限制,通过输出电压就能测得外界的加速度大小。
三轴陀螺仪与加速传感器配合是如何实现辅助GPS进行定位导航的呢
从MEMS陀螺仪的应用方向来看,陀螺仪能够测量沿一个轴或几个轴运动的角速度,可与MEMS加速度计(加速计)形成优势互补,如果组合使用加速度计和陀螺仪这两种传感器,设计者就能更好地跟踪并捕捉三维空间的完整运动,为最终用户提供现场感更强的用户使用体验、精确的导航系统以及其它功能。
要准确地描述线性(直线运动)和旋转运动(有转弯变化的运动),需要设计者同时用到陀螺仪和加速度计。
- 单纯使用陀螺仪的方案可用于需要高分辨率和快速反应的旋转检测;
- 单纯使用加速度计的方案可用于有固定的重力参考坐标系、存在线性或倾斜运动但旋转运动被限制在一定范围内的应用。但同时处理直线运动和旋转运动时,就需要使用加速度和陀螺仪计的方案。
此外,为让设计和制作的陀螺仪具有较高的加速度和较低的机械噪声,或为校正加速度计的旋转误差,一些厂商会使用磁力计来完成传统上用陀螺 仪实现的传感功能,以完成相应定位,让陀螺仪术业有专攻。这表明,混合的陀螺仪、加速度计或磁感应计结合的方案正成为MEMS陀螺仪技术应用的趋势。若只 使用传统的加速度计,用户得到的要么是反应敏捷的但噪声较大的输出,要么是反应慢但较纯净的输出,而如将加速度计与陀螺仪相结合,就能得到既纯净又反应敏 捷的输出。
加速度计是惯性导航和惯性制导系统的基本测量元件之一,加速度计本质上是一个振荡系统,安装于运动载体的内部,可以用来测量载体的运动加速度,利用已知的 GPS测量等等的初始速度,对加速度积分,就可知道载体的速度和位置等信息。因此,加速度计的性能和精度直接影响导航和制导系统的精度。
简而言之,言而简之
室外:GPS——用于在室外能够搜索到足够卫星情况下的导航
室内:
- 加速度计用于测量加速度,结合GPS所提供的初始速度,可以计算出现有的速度运动的距离。
- 陀螺仪用于测量设备的转弯或坡度变化大小
在GPS信号被阻挡或受到干扰而不能进行定位的环境中,通过陀螺仪与加速度计就可以进行另一种方式的导航,可以大幅提升定位导航的效率与准确度。IPhone装上陀螺仪与加速度计后,会带动一大批手机厂商的跟进,这将会有力地推动LBS服务的进一步增长。
相关知识:MEMS
MEMS是微机电系统(Micro-Electro-Mechanical Systems)的英文缩写。MEMS是美国的叫法,在日本被称为微机械,在欧洲被称为微系统,它是指可批量制作的,集微型机构、微型传感器、微型执行器 以及信号处理和控制电路、直至接口、通信和电源等于一体的微型器件或系统。MEMS是随着半导体集成电路微细加工技术和超精密机械加工技术的发展而发展起 来的,目前MEMS加工技术还被广泛应用于微流控芯片与合成生物学等领域,从而进行生物化学等实验室技术流程的芯片集成化。
三轴陀螺仪与加速度计如何辅助 iPhone 定位的的更多相关文章
- STC8H开发(七): I2C驱动MPU6050三轴加速度+三轴角速度检测模块
目录 STC8H开发(一): 在Keil5中配置和使用FwLib_STC8封装库(图文详解) STC8H开发(二): 在Linux VSCode中配置和使用FwLib_STC8封装库(图文详解) ST ...
- 陀螺仪、加速度计与MPU6050的关系
文章目录 一.引言 二.陀螺仪 三.加速度计 四.MPU6050 一.引言 要开始做俩轮平衡小车了,所以需要补充一些关于平衡小车的知识,首先就是如何让小车保持平衡,这是要依据小车当前的三轴角度和平衡位 ...
- Arduino I2C + 三轴加速度计LIS3DH
LIS3DH是ST公司生产的MEMS三轴加速度计芯片,实现运动传感的功能.主要特性有: 宽工作电压范围:1.71 ~ 3.6V 功耗:低功耗模式2μA:正常工作模式.ODR = 50Hz时功耗11μA ...
- Arduino I2C + 三轴加速度计ADXL345
ADXL345是ADI公司生产的三轴数字加速度计芯片,与ST的LIS3DH功能接近.主要特性有: 工作电压:2.0 ~ 3.6V 功耗:待机功耗0.1μA:工作时与数据输出频率(ODR)有关,如ODR ...
- 开源三轴云台EVVGC(simple BGC)分析
一. 主程序分析 主程序结构清晰,流程如图所示,下面将对每个部分做详细分析 二. 系统初始化 系统初始化部分的流程如上图所示,下面对每部分做具体分析 1. 时钟初始化 该部分主要是使能DWT,用DWT ...
- 【雕爷学编程】Arduino动手做(48)---三轴ADXL345模块
37款传感器与模块的提法,在网络上广泛流传,其实Arduino能够兼容的传感器模块肯定是不止37种的.鉴于本人手头积累了一些传感器和模块,依照实践(动手试试)出真知的理念,以学习和交流为目的,这里准备 ...
- STC8H开发(六): SPI驱动ADXL345三轴加速度检测模块
目录 STC8H开发(一): 在Keil5中配置和使用FwLib_STC8封装库(图文详解) STC8H开发(二): 在Linux VSCode中配置和使用FwLib_STC8封装库(图文详解) ST ...
- [算法][三轴、六轴、九轴传感器算法分析] 1、分享一个三轴加速计matlab动态可视化脚本
一.有啥用 这里用的是LIS3DH三轴加速计,输出为X.Y.Z轴的加速度,通过串口连接电脑,电脑里运行matlab脚本通过串口实时获取数据并做可视化显示. 这里虽然是针对LIS3DH的,其实稍作修改即 ...
- 单片机实验: 三轴磁场模块 GY-271
最近买了一块三轴磁场模块进行实验 名称:HMC5883L模块(三轴磁场模块) 型号:GY-271 使用芯片:HMC5883L 供电电源:3-5v 通信方式:IIC通信协议 测量范围:±1.3-8 高斯 ...
随机推荐
- Python数据分析简介
1,Python作为一门编程语言开发效率快,运行效率被人诟病,但是Python核心部分使用c/c++等更高效的语言来编写的还有强大的numpy, padnas, matplotlib,scipy库等应 ...
- echarts 饼状图
说明:这是我做项目时自己写的小例子,里面有冗余的参数. 开发环境 vs2012 asp.net mvc4 c# 1.显示效果 2.HTML代码 <%@ Page Language=" ...
- if UDP is permitted
Networking Basics (The Java™ Tutorials > Custom Networking > Overview of Networking) https://d ...
- 组件的详细说明和生命周期ComponentSpecs and Lifecycle
render ReactComponent render() render() 方法是必须的. 当调用的时候,会检测 this.props 和 this.state,返回一个单子级组件.该子级组件可以 ...
- beego 导入一个普通的包都会执行init方法,如果是struct就不会执行
default.go package controllers import ( "beego-test/models" "beego-test/service" ...
- vue指令与$nextTick 操作DOM的不同之处
异步更新队列 可能你还没有注意到,Vue 异步执行 DOM 更新.只要观察到数据变化,Vue 将开启一个队列,并缓冲在同一事件循环中发生的所有数据改变.如果同一个 watcher 被多次触发,只会被推 ...
- NOIP2015_提高组Day2_3_运输计划
这题思路很简单: 先对每个询问求距离,对距离由大到小排序, 二分最小距离,验证是否可行,验证时用差分处理: #include<iostream> #include<cstring&g ...
- Gym - 100187E E - Two Labyrinths —— bfs
题目链接:http://codeforces.com/gym/100187/problem/E 题解:一开始做的时候是将两幅图合并,然后直接bfs看是否能到达终点.但这种做法的错的,因为走出来的路对于 ...
- IPFS 到底是怎么工作的?
简介 我们知道,一个存储服务,最基本的功能就是存和取.IPFS 中提供了这两种语义,那就是 add 和 get 操作. 在 IPFS 系统中执行 add 操作,就是执行了一次存操作,放在网络的概念里, ...
- 英语发音规则---gh
英语发音规则---gh 一.总结 一句话总结:gh字母组合的读音在中学英语课本中归纳起来主要有"发音"和"不发音"两种情况. gh字词首是发/g/,因为需要开头 ...