松灵机器人scout mini小车 自主导航(1)
松灵机器人scout mini小车 自主导航
最近实验室来了个松灵机器人scout mini的底座。本着学习的目的对其进行了研究,从最基础的连接开始。
1.硬件连接准备
松灵scout mini提供了航空插头用于can串口转USB的操作。

将通讯航空插头连接到小车对应插口。然后将CAN线引出,将CAN线中的CAN_H和CAN_L分别与CAN_TO_USB适配器相连。然后打开scout mini移动机器人底盘开关,将CAN_TO_USB连接到笔记本的usb口。
具体连接方式如下图所示:

注意:一根usb to can线300 money,用的时候要小心保护
2.测试硬件与CAN通讯
设置CAN_TO_USB对应适配器,检测是否连接成功
1.启动gs_usb 内核模块
sudo modprobe gs_usb
2.设置500k波特率适配
sudo ip link set can0 up type can bitrate 500000
3.如果前面没有出现错误,可以使用命令ifconfig -a查看can设备
ifconfig -a
4.安装并使用can-utils来测试硬件
sudo apt install can-utils
5。使用命令监听小车底盘数据
candump can0
如果前面都没有错,且小车打开状态,执行完candump can0后会源源不断收到小车底盘反馈的数据。
如果出现错误,拔插一下重新运行命令。
3. ROS功能包测试
松灵机器人提供了对应的ROS功能包用于二次开发。可以通过ROS依赖包直接对小车底盘进行控制。
3.1.下载ROS相关依赖
首先需要根据自己的ROS版本安装对应的依赖,我的是ubuntu18,对应的ROS为melodic
#根据自己ROS版本更改命令
sudo apt install ros-melodic-controller-manager
sudo apt install ros-melodic-joint-state-publisher-gui
sudo apt install -y libasio-dev
3.2. 新建工作空间
新建工作空间,将代码包复制到新建工作空间下的src目录。然后进行编译
mkdir -p scout_ws/src
cd scout_ws/src
git clone --recursive https://github.com/agilexrobotics/ugv_sdk.git
git clone https://github.com/agilexrobotics/scout_ros.git
cd ..
catkin_make
3.3 键盘控制小车移动
在测试完硬件与CAN连接成功后,松灵官方提供了键盘控制小车移动指令
连接电脑usb和小车后,打开电源,运行下面命令:
#1)连接设备
sudo ip link set can0 up type can bitrate 500000
#2)测试接受数据
candump can0
#3)运行小车底盘的ros节点 base
cd scout_ws/
source devel/setup.bash
roslaunch scout_bringup scout_mini_robot_base.launch
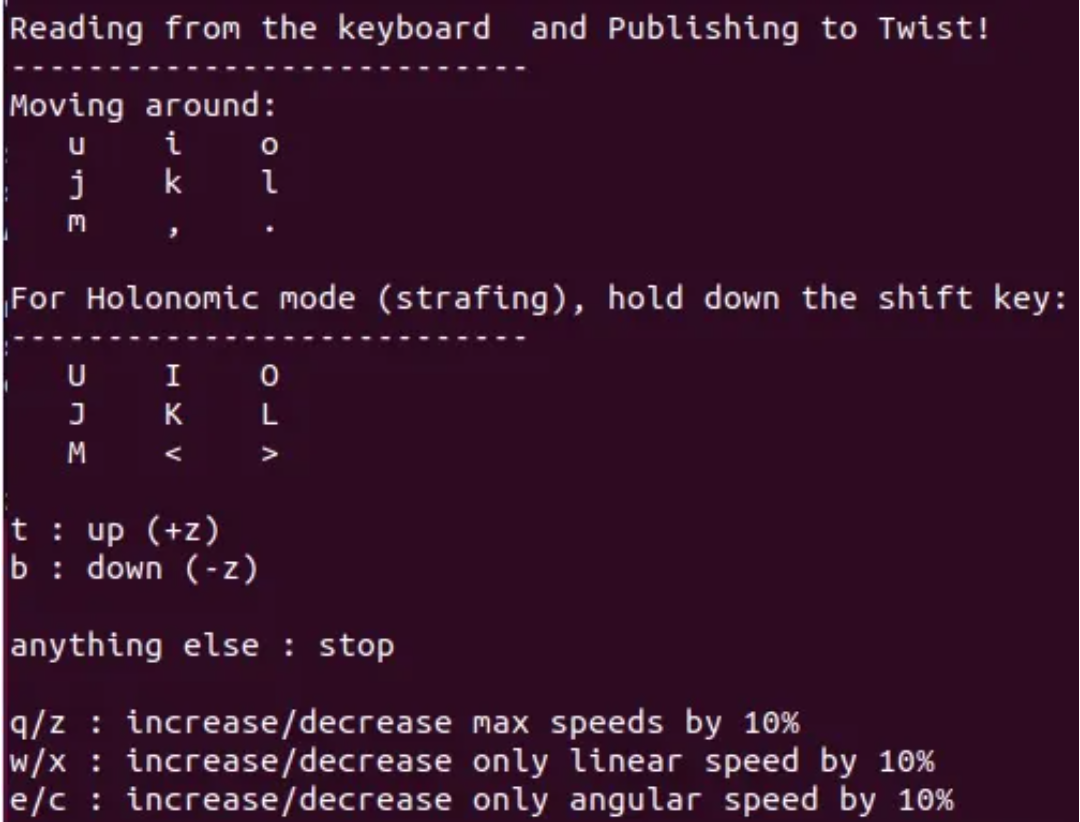
#4)运行键盘控制节点
source devel/setup.bahs
roslaunch scout_bringup scout_teleop_keyboard.launch
注意:建议先用z将小车速度降低到可控范围内,并打开遥控器确保随时接手控制防止发生碰撞。再运行节点命令
终端的控制界面如下所示:
松灵机器人scout mini小车 自主导航(1)的更多相关文章
- QT--图灵机器人
QT--图灵机器人 1.登陆图灵机器人官网注册一个图灵机器人 2.获取apikey 3.pro文件添加 QT += core gui network 4.头文件 #include < ...
- weiphp---------图灵机器人存在的bug。
1.很多人下载下来weiphp源码以后,配置好了图灵机器人却不能使用.原因是因为他源码里面存在一个小bug 上图红色框框内是他的源码,问题就出在这里. 修改方法: if($result ['code' ...
- ROS::message_filters中的一个报错(mt::TimeStamp……)
『方便检索』 ros::Time msg_time = mt::TimeStamp<typename mpl::at_c<Messages, i>::type>::value( ...
- Android智能聊天机器人
http://www.tuling123.com/ 注册一个账号,申请一个KEY值.此网站也有文档,可以查看. package com.tulingdemo; import java.te ...
- ROS机器人程序设计(原书第2版)补充资料 (玖) 第九章 导航功能包集进阶 navigation
ROS机器人程序设计(原书第2版)补充资料 (玖) 第九章 导航功能包集进阶 navigation 书中,大部分出现hydro的地方,直接替换为indigo或jade或kinetic,即可在对应版本中 ...
- ROS探索总结(十七)——构建完整的机器人应用系统
上一篇博客介绍了HRMRP机器人平台的设计,基于该平台,可以完成丰富的机器人应用,以较为典型的机器人导航为例,如何使用HRMRP来完成相应的功能?本篇博客将详细介绍如何将HRMRP应用到 ...
- java最简单的方式实现httpget和httppost请求
java实现httpget和httppost请求的方式多种多样,个人总结了一种最简单的方式,仅仅需几行代码,就能够完美的实现. 此处须要用到两个jar包,httpclient-4.3.1.jar.ht ...
- 入门ROS教程与视频汇总(kinetic)
参考网址: Richard Wang 3 Shawn Chen 部分视频网址: http://v.youku.com/v_show/id_XMjUxMTc5MzE5Mg http://i.you ...
- ROS系统的安装以及卸载
ROS系统的安装 ROS系统的安装方式有两种,通过软件源和源码编译安装.软件源安装只需要通过简单的命令,因此,我们使用软件源来安装ROS 配置系统软件源 打开Ubuntu软件中心的软件源配置界面,勾选 ...
- 加快你ROS安装的一篇文章
前言: 首先ROS大家应该比较熟悉了哈,如果需要补充一下请看我之前的这篇文章 <嵌入式的我们为什么要学ROS>,对于嵌入式来说ROS是一个很好的进阶方向,所以如何快速的安装一个ROS到我们 ...
随机推荐
- 带有声音/音频的 Mac 远程桌面
一言以蔽之:如果你用远程桌面软件访问mac电脑遇到声音问题,改用Splashtop就好了.Splashtop对于Mac 的远程桌面支持非常棒. 尽管有几种远程桌面工具可提供对 Mac 的远程访问,但许 ...
- vulnhub --> Web Machine: (N7)
靶场下载地址 Web Machine: (N7) << 点我 开始打靶 ip发现: nmap扫描网段发现靶机ip:192.168.56.101 端口发现: 对靶机进行常规端口扫描 访问网站 ...
- 可以把erp当做一个分支-找自己的方向
之前一直在寻思自己应该做哪些方面,对所有编程的问题都在研究,又看到自己研究不透.现在,某一时刻看到,可以把erp当做一个分支. 就像游戏里的天赋点一样,进入这个分支... 这是一个专一的方面,和编程普 ...
- Django----模型----数据库的基本操作
1.添加记录 方式一:save() 方式二(推荐):create() 2.查询记录 (1)all() 查询所有记录,返回queryset对象. stu_list = Student.objects.a ...
- linux服务器下安装cbc和ipopt求解器【踩坑总结】
安装CBC求解器 CBC求解器是一个C++库,我们可以通过以下命令在Linux系统中进行安装: sudo apt-get install coinor-cbc 对于Windows操作系统,可以从CBC ...
- 编译安装mysql5.7.20
curl -o /etc/yum.repos.d/CentOS-Base.repo http://mirrors.aliyun.com/repo/Centos-7.repo && \ ...
- Understanding Swift’s value type thread safety - 代码分析(一)
结构体并不代表线程安全,swift在此上未做保证 func testScenarioA() throws { var store: Int = 0 DispatchQueue.concurrentPe ...
- git创建分支 解决git网速太慢
所谓的分支,就是每个人负责的不同的模块 整个项目有一个主干 master 所有的分支都是 从主干 maser 上 分支而来的 ...
- kettle从入门到精通 第六十六课 ETL之kettle kettle阻塞教程,轻松获取最后一行数据,so easy
场景:ETL沟通交流群内有小伙伴反馈,如何在同步一批数据完成之后记录下同步结果呢?或者是调用后续步骤.存储过程.三方接口等. 解决:使用步骤Blocking step进行阻塞处理即可. 1.下面的de ...
- Linux扩展篇-shell编程(四)-shell条件判断
基本语法 格式一: test condition 格式二: [ condition ] 注意:1)condition前后要有空格.2)条件非空即为true,例如[ hello ]返回true,[ ]返 ...