机器人学 —— 轨迹规划(Introduction)
轨迹规划属于机器人学中的上层问题,其主要目标是计划机器人从A移动到B并避开所有障碍的路线。
1、轨迹计划的对象
轨迹规划的对象是map,机器人通过SLAM获得地map后,则可在地图中选定任意两点进行轨迹规划。暂时不考虑三维地图,以平面二维图为例,map主要有以下几种:


如上所示,二维图可以分为有权重的节点图以及无权重的网格图。以飞行机器人移动为例:如果场地上每个部分移动所消耗的能量都是等价的,则可以使用网格图进行建模。如果在不同的区域移动所消耗的能量不同,则应该使用节点图来进行建模。
2、轨迹规划的方法
2.1、 grassfire method
grassfire method是一种最简单的轨迹规划算法。其数据结构包括三个部分:
1.map,记录了起点,终点,障碍物的位置
2.distancetoStart,记录了每个探索步骤后,方格与初始点的距离
3.parent,记录了每个节点的父节点
算法步骤:
1、获取map
2、初始化distancetostart,将起点设为current, 将distance_ 设为0
3、进入循环 如果current = destination 则跳出循环
将distancetostart中最小值对应的节点设为current
distance_ = distance_+1
寻找current所有的相邻节点
将相邻节点的distancetostart设为distance_,parent设为current
将current的distance_设为无穷大
4、依据parent map反求轨迹


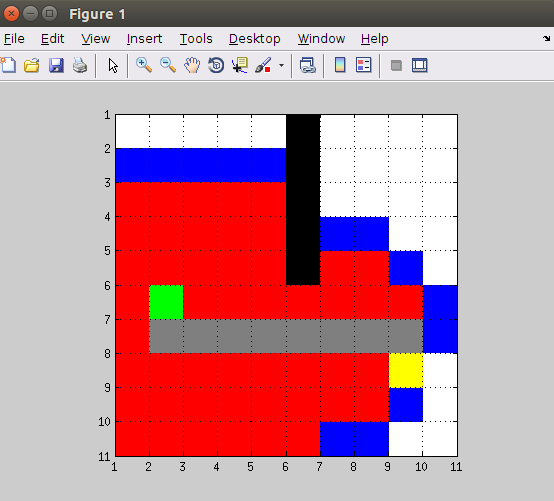
显然,这种grassfire算法是极其消耗计算能力的,因为其需要遍历网格中几乎每一个格子,甚至明明destination在上方,grassfire算法依旧需要向下探索。图中红色的区域代表已探索的点,蓝色是candidate,绿色是起点,黄色是终点。显然这个算法是各向同性的。
2.2、A* 算法
grassfire算法的最大缺点是没有使用终点与起点相对位置关系信息。从而导致各项同性的探索策略。如果能增加一个将candidate拉向目标点的趋势,则可以减小被探索的点数目。
A* 算法的数据结构包括五个部分:
1、map
2、g:相当于distancetostart;
3、H:一种衡量算子,用于衡量当前点到目标点的绝对距离
4、f:g+H,综合了当前点到起点的距离与到终点的距离
5、parent,用于记录轨迹
算法步骤:
1、初始化,获取map,并将起点设为current. 获取H map,distance_ = 0
2、进入循环 如果current为destination则退出循环
distance_ = distance_ +1;
获取当前点的相邻点
将相邻点的g map值设为distance_
将相邻点的f map值设为g+H
选择f map值最小的点为current
将current f map值设为无穷大
3、根据parent map, 反求轨迹
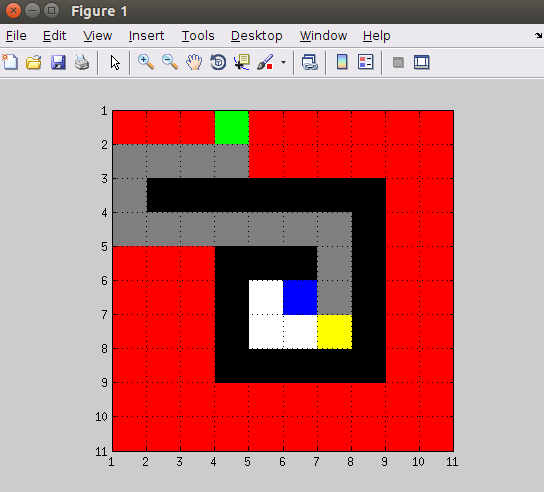
结果如上所示。
显然,由于引入了H map,所以算法会优先探索相对终点较近的点。obj = distance to start + distance to end 代表了最后需要走过的距离。每次都选择最小的obj,并且最后能够达到终点,那么总路程一定是全局最小的。
3、总结
对于飞行机器人而言,每次移动都会消耗大量的能量。好的轨迹规划算法可以保证飞行器少走弯路,避开障碍。所以减少计算量必须是在少走弯路的前提下。移动所消耗的能量是计算所消耗能量的十倍左右。
机器人学 —— 轨迹规划(Introduction)的更多相关文章
- 机器人学 —— 轨迹规划(Artificial Potential)
今天终于完成了机器人轨迹规划的最后一次课了,拜拜自带B - BOX 的 Prof. TJ Taylor. 最后一节课的内容是利用势场来进行轨迹规划.此方法的思路非常清晰,针对Configration ...
- 机器人学 —— 轨迹规划(Sampling Method)
上一篇提到,机器人轨迹规划中我们可以在 Configuration Space 中运行A* 或者 DJ 算法.无论A* 还是DJ 算法,都必须针对邻域进行搜索,如果2自由度则有4邻域,2自由度则有8邻 ...
- 机器人学 —— 轨迹规划(Configuration Space)
之前的轨迹规划中,我们只考虑了质点,没有考虑机器人的外形与结构.直接在obstacle map 中进行轨迹规划,然而世纪情况中,机器人有固定外形,可能会和障碍物发生碰撞.此情况下,我们针对机器人自由度 ...
- 机器人中的轨迹规划(Trajectory Planning )
Figure. Several possible path shapes for a single joint 五次多项式曲线(quintic polynomial) $$\theta(t)=a_0+ ...
- 【2018.04.19 ROS机器人操作系统】机器人控制:运动规划、路径规划及轨迹规划简介之一
参考资料及致谢 本文的绝大部分内容转载自以下几篇文章,首先向原作者致谢,希望自己能在这些前辈们的基础上能有所总结提升. 1. 运动规划/路径规划/轨迹规划的联系与区别 https://blog.csd ...
- 机器人关节空间轨迹规划--S型速度规划
关节空间 VS 操作空间 关节空间与操作空间轨迹规划流程图如下(上标$i$和$f$分别代表起始位置initial和目标位置final): 在关节空间内进行轨迹规划有如下优点: 在线运算量更小,即无需进 ...
- zz自动驾驶中轨迹规划的探索和挑战
大家好,今天我们主要介绍一下轨迹规划的探索和挑战,我主要从四个方面介绍: 轨迹规划的概念 决策 横向规划 纵向规划 轨迹规划的概念: 轨迹规划的核心就是要解决车辆该怎么走的问题.比如我们知道了附近有行 ...
- Minimum Snap轨迹规划详解(2)corridor与时间分配
在上一篇文章中,我们得到的轨迹并不是很好,与路径差别有点大,我们期望规划出的轨迹跟路径大致重合,而且不希望有打结的现象,而且希望轨迹中的速度和加速度不超过最大限幅值.为了解决这些问题有两种思路: 思路 ...
- Minimum Snap轨迹规划详解(1)轨迹规划
一. 轨迹规划是什么? 在机器人导航过程中,如何控制机器人从A点移动到B点,通常称之为运动规划.运动规划一般又分为两步: 1.路径规划:在地图(栅格地图.四\八叉树.RRT地图等)中搜索一条从A点到B ...
随机推荐
- cadence原理图绘制方法
仅记录了绘制好原理图后的一些处理: 1 重写编写元件编号 1)Tool -> Annotate 在Packing选项卡中 的Action 选中 Reset part references ...
- Linux磁盘空间爆满,MySQL无法启动
OS: Cent OS 6.3 DB: 5.5.14 看到一个帖子,在服务器上安装了oracle和mysql数据库,mysql数据库忘记开启innodb_file_per_table,导致插入测试数据 ...
- netlink---Linux下基于socket的内核和上层通信机制 (转)
需要在linux网卡 驱动中加入一个自己的驱动,实现在内核态完成一些报文处理(这个过程可以实现一种零COPY的网络报文截获),对于复杂报文COPY下必要的数据交给用户 态来完成(因为过于复杂的报文消耗 ...
- 折腾了好久的macos+apache+php+phpmyadmin 终于成功了!
由于最近需要布置mantis用来进行bug追踪,在此记录其过程. 由于PHP apache环境在Mac OS上是自带的,所以不需要另处下安装包,只需要简单配置一下即可. 首先打开终端输入命令: sud ...
- Apache网站根目录
Apache环境配置好了,把项目放到网站根目录下的htdocs文件夹下,运行网站的时候不需要加上该文件夹的名称,Apache直接在上面找对应的项目
- SVN备份教程(三)
上次的博文SVN备份教程(二)中,我们讲解了一下SVN定时备份的相关内容,同时我们又提出了一种新的SVN备份方案--自动备份. 1.简介 所谓自动备份,它实现的思路非常简单,就是利用SVN自带的hoo ...
- 如何调优JVM - 优化Java虚拟机(大全+实例)
堆设置 -Xmx3550m:设置JVM最大堆内存 为3550M. -Xms3550m:设置JVM初始堆内存 为3550M.此值可以设置与-Xmx相同,以避免每次垃圾回收完成后JVM重新分配内存. -X ...
- JAVA类与对象(三)----类定义关键字详解
static 表示静态,它可以修饰属性,方法和代码块. 1.static修饰属性(类变量),那么这个属性就可以用类名.属性名来访问,也就是使这个属性成为本类的类变量,为本类对象所共有.这个属性就是全类 ...
- windows鼠标消息处理与键盘模拟函数
1.鼠标坐标问题 BOOL GetWindowRect( HWND hWnd, LPRECT lpRect ); RECT x;//定义一个二维数组x ::GetWindowRect(hwn ...
- github pages
http://zyip.github.io/facemaker/index echo "hello world" >>hello.htm git init git ad ...