机器人学 —— 轨迹规划(Sampling Method)
上一篇提到,机器人轨迹规划中我们可以在 Configuration Space 中运行A* 或者 DJ 算法。无论A* 还是DJ 算法,都必须针对邻域进行搜索,如果2自由度则有4邻域,2自由度则有8邻域。如果是工业上常用的6自由度机器人,那么就有2^6邻域。。。。。。显然,对于轨迹规划这种串行算法而言,这么高维度的搜索空间是不合适的.......于是就有了牺牲精度,鲁棒性,但是效率较高的基于采样的轨迹规划算法。PRM(probabilistic road map)。使用PRM生成稀疏的路径图,再利用A*算法在路径图中进行轨迹规划,则可以显著提高效率。
1、生成永久map的PRM算法
PRM算法的伪代码如下:

其中Dist function 是计算Configuration Space中,点与点之间距离的函数。Local Planner 是检查点与点连线是否在Configuration Space 中经过非自由区域的函数。
此算法的本质是蒙特卡洛算法。所以原本很容易在GPU上实现并行化。最大的困难还是处于非自由区域检查部分...
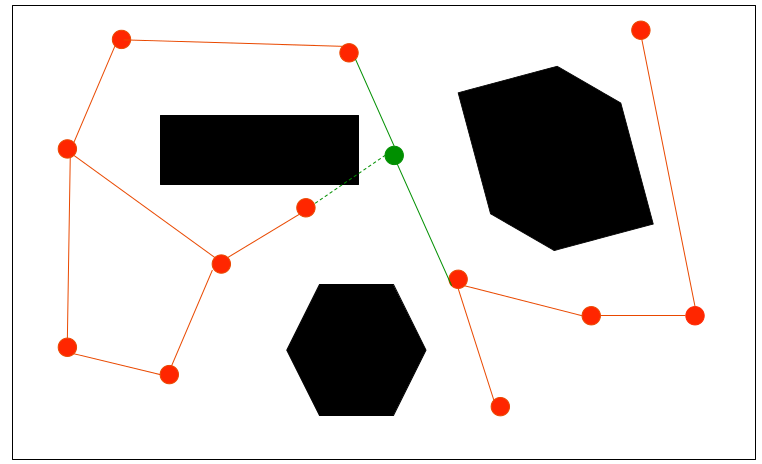
绿色的点为随机采样点。
2、在空间中生成一次性路径的 RRT 算法
很多时候,我们并不需要生成一整个可以反复使用的map ,我们更需要在空间中寻找到一条可以移动的路径。比如,无人汽车从A到B ,我们只需要生成一次路径即可,回头时障碍物可能已经发生变化。这时候我们使用RRT算法。


其root 为起点与终点,只要最后两棵树可以合并,那么则找到了起点到终点的路径
机器人学 —— 轨迹规划(Sampling Method)的更多相关文章
- 机器人学 —— 轨迹规划(Introduction)
轨迹规划属于机器人学中的上层问题,其主要目标是计划机器人从A移动到B并避开所有障碍的路线. 1.轨迹计划的对象 轨迹规划的对象是map,机器人通过SLAM获得地map后,则可在地图中选定任意两点进行轨 ...
- 机器人学 —— 轨迹规划(Artificial Potential)
今天终于完成了机器人轨迹规划的最后一次课了,拜拜自带B - BOX 的 Prof. TJ Taylor. 最后一节课的内容是利用势场来进行轨迹规划.此方法的思路非常清晰,针对Configration ...
- 机器人学 —— 轨迹规划(Configuration Space)
之前的轨迹规划中,我们只考虑了质点,没有考虑机器人的外形与结构.直接在obstacle map 中进行轨迹规划,然而世纪情况中,机器人有固定外形,可能会和障碍物发生碰撞.此情况下,我们针对机器人自由度 ...
- 【2018.04.19 ROS机器人操作系统】机器人控制:运动规划、路径规划及轨迹规划简介之一
参考资料及致谢 本文的绝大部分内容转载自以下几篇文章,首先向原作者致谢,希望自己能在这些前辈们的基础上能有所总结提升. 1. 运动规划/路径规划/轨迹规划的联系与区别 https://blog.csd ...
- 机器人关节空间轨迹规划--S型速度规划
关节空间 VS 操作空间 关节空间与操作空间轨迹规划流程图如下(上标$i$和$f$分别代表起始位置initial和目标位置final): 在关节空间内进行轨迹规划有如下优点: 在线运算量更小,即无需进 ...
- 机器人中的轨迹规划(Trajectory Planning )
Figure. Several possible path shapes for a single joint 五次多项式曲线(quintic polynomial) $$\theta(t)=a_0+ ...
- sampling method
sampling method 背景 在贝叶斯框架下,利用后验分布对参数进行估计,也即 其中 (1)是参数的先验分布. (2)是似然分布,数据集的生成联合概率 (3)是参数的后验分布. 通常分布很复杂 ...
- zz自动驾驶中轨迹规划的探索和挑战
大家好,今天我们主要介绍一下轨迹规划的探索和挑战,我主要从四个方面介绍: 轨迹规划的概念 决策 横向规划 纵向规划 轨迹规划的概念: 轨迹规划的核心就是要解决车辆该怎么走的问题.比如我们知道了附近有行 ...
- Minimum Snap轨迹规划详解(2)corridor与时间分配
在上一篇文章中,我们得到的轨迹并不是很好,与路径差别有点大,我们期望规划出的轨迹跟路径大致重合,而且不希望有打结的现象,而且希望轨迹中的速度和加速度不超过最大限幅值.为了解决这些问题有两种思路: 思路 ...
随机推荐
- Team Homework #2 Decide the roles of each team member ——IloveSE
大家好,我们是IloveSEers! 徐姗,我是一个性格开朗,但却认为计算机比较枯燥的女生.经过两年的学习,自己的编程能力,并不是很强,在这方便还需多多练习.对于软件工程这门课,我充满期待,因为我不仅 ...
- 【Permutations II】cpp
题目: Given a collection of numbers that might contain duplicates, return all possible unique permutat ...
- git的初步了解
其实git我也不熟,请两天假回来宿友告诉我,我们有一份高大尚的作业.我问她们才知道原来是让我们以博客的形式写两份作业交上去.git还是我在网上查找到的,才对它有一些的了解. git是一个开源分布式版本 ...
- MyEclipse2015 编写js报 'Calculating completion proposals..' has encountered a problem.
前言:编写js(按点后)弹出这个鬼东西,百度不到..估计是破解有问题.只有换版本了. 版本:MyEclipse 2015 stable 1.0 详细错误信息 解决:换成2.0版本
- discuz之搭建
本篇将介绍IIS+MySQL+DiscuzX3.1+UCenter1.6+Asp.Net+PHP的部署 大部分都是搬运过来的,当然我会注明搬运地点 搭建 首先说明本机基本信息 系统========== ...
- SPOJ - DQUERY 主席树
题目链接:http://acm.hust.edu.cn/vjudge/problem/viewProblem.action?id=32356 Given a sequence of n numbers ...
- NYOJ-949 哈利波特 AC 分类: NYOJ 2013-12-30 12:57 217人阅读 评论(0) 收藏
#include<stdio.h> int main(){ long long a,b,c,d,e,f; while(scanf("%lld%lld%lld%lld%lld%ll ...
- add some template for ec-final
二维rmq 离线 init O( n*n*logn*logn ) query O(1) http://www.cnblogs.com/kuangbin/p/3227420.html 求1-n有多少个 ...
- Git 局域网简单配置
Git核心:http://code.google.com/p/msysgit/downloads/list?q=full+installer+official+gitTortoiseGit :http ...
- 如何优化C语言代码(程序员必读)
1.选择合适的算法和数据结构 应该熟悉算法语言,知道各种算法的优缺点,具体资料请参见相应的参考资料,有很多计算机书籍上都有介绍.将比较慢的顺序查找法用较快的二分查找或乱序查找法代替,插入排序或冒泡排序 ...