机器人学 —— 轨迹规划(Introduction)
轨迹规划属于机器人学中的上层问题,其主要目标是计划机器人从A移动到B并避开所有障碍的路线。
1、轨迹计划的对象
轨迹规划的对象是map,机器人通过SLAM获得地map后,则可在地图中选定任意两点进行轨迹规划。暂时不考虑三维地图,以平面二维图为例,map主要有以下几种:


如上所示,二维图可以分为有权重的节点图以及无权重的网格图。以飞行机器人移动为例:如果场地上每个部分移动所消耗的能量都是等价的,则可以使用网格图进行建模。如果在不同的区域移动所消耗的能量不同,则应该使用节点图来进行建模。
2、轨迹规划的方法
2.1、 grassfire method
grassfire method是一种最简单的轨迹规划算法。其数据结构包括三个部分:
1.map,记录了起点,终点,障碍物的位置
2.distancetoStart,记录了每个探索步骤后,方格与初始点的距离
3.parent,记录了每个节点的父节点
算法步骤:
1、获取map
2、初始化distancetostart,将起点设为current, 将distance_ 设为0
3、进入循环 如果current = destination 则跳出循环
将distancetostart中最小值对应的节点设为current
distance_ = distance_+1
寻找current所有的相邻节点
将相邻节点的distancetostart设为distance_,parent设为current
将current的distance_设为无穷大
4、依据parent map反求轨迹


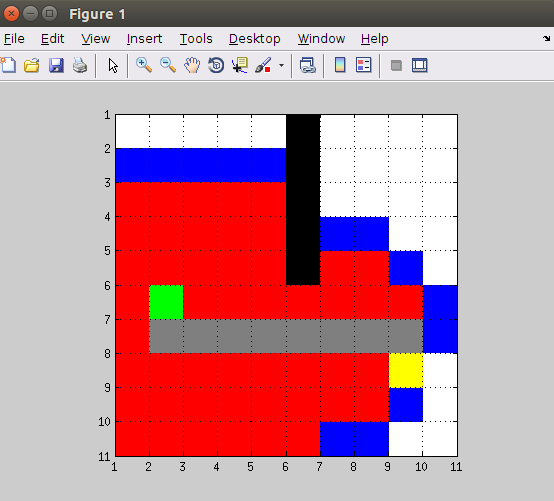
显然,这种grassfire算法是极其消耗计算能力的,因为其需要遍历网格中几乎每一个格子,甚至明明destination在上方,grassfire算法依旧需要向下探索。图中红色的区域代表已探索的点,蓝色是candidate,绿色是起点,黄色是终点。显然这个算法是各向同性的。
2.2、A* 算法
grassfire算法的最大缺点是没有使用终点与起点相对位置关系信息。从而导致各项同性的探索策略。如果能增加一个将candidate拉向目标点的趋势,则可以减小被探索的点数目。
A* 算法的数据结构包括五个部分:
1、map
2、g:相当于distancetostart;
3、H:一种衡量算子,用于衡量当前点到目标点的绝对距离
4、f:g+H,综合了当前点到起点的距离与到终点的距离
5、parent,用于记录轨迹
算法步骤:
1、初始化,获取map,并将起点设为current. 获取H map,distance_ = 0
2、进入循环 如果current为destination则退出循环
distance_ = distance_ +1;
获取当前点的相邻点
将相邻点的g map值设为distance_
将相邻点的f map值设为g+H
选择f map值最小的点为current
将current f map值设为无穷大
3、根据parent map, 反求轨迹
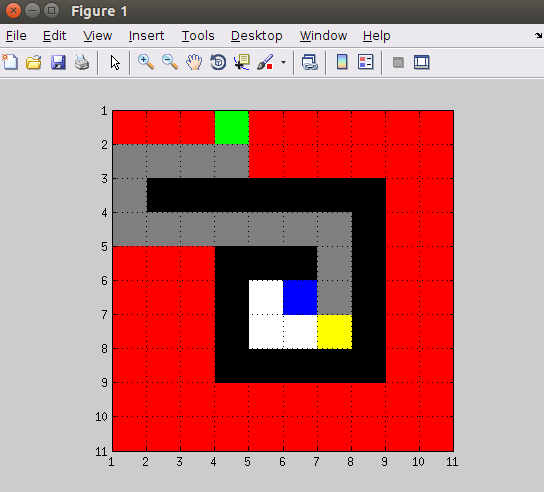
结果如上所示。
显然,由于引入了H map,所以算法会优先探索相对终点较近的点。obj = distance to start + distance to end 代表了最后需要走过的距离。每次都选择最小的obj,并且最后能够达到终点,那么总路程一定是全局最小的。
3、总结
对于飞行机器人而言,每次移动都会消耗大量的能量。好的轨迹规划算法可以保证飞行器少走弯路,避开障碍。所以减少计算量必须是在少走弯路的前提下。移动所消耗的能量是计算所消耗能量的十倍左右。
机器人学 —— 轨迹规划(Introduction)的更多相关文章
- 机器人学 —— 轨迹规划(Artificial Potential)
今天终于完成了机器人轨迹规划的最后一次课了,拜拜自带B - BOX 的 Prof. TJ Taylor. 最后一节课的内容是利用势场来进行轨迹规划.此方法的思路非常清晰,针对Configration ...
- 机器人学 —— 轨迹规划(Sampling Method)
上一篇提到,机器人轨迹规划中我们可以在 Configuration Space 中运行A* 或者 DJ 算法.无论A* 还是DJ 算法,都必须针对邻域进行搜索,如果2自由度则有4邻域,2自由度则有8邻 ...
- 机器人学 —— 轨迹规划(Configuration Space)
之前的轨迹规划中,我们只考虑了质点,没有考虑机器人的外形与结构.直接在obstacle map 中进行轨迹规划,然而世纪情况中,机器人有固定外形,可能会和障碍物发生碰撞.此情况下,我们针对机器人自由度 ...
- 机器人中的轨迹规划(Trajectory Planning )
Figure. Several possible path shapes for a single joint 五次多项式曲线(quintic polynomial) $$\theta(t)=a_0+ ...
- 【2018.04.19 ROS机器人操作系统】机器人控制:运动规划、路径规划及轨迹规划简介之一
参考资料及致谢 本文的绝大部分内容转载自以下几篇文章,首先向原作者致谢,希望自己能在这些前辈们的基础上能有所总结提升. 1. 运动规划/路径规划/轨迹规划的联系与区别 https://blog.csd ...
- 机器人关节空间轨迹规划--S型速度规划
关节空间 VS 操作空间 关节空间与操作空间轨迹规划流程图如下(上标$i$和$f$分别代表起始位置initial和目标位置final): 在关节空间内进行轨迹规划有如下优点: 在线运算量更小,即无需进 ...
- zz自动驾驶中轨迹规划的探索和挑战
大家好,今天我们主要介绍一下轨迹规划的探索和挑战,我主要从四个方面介绍: 轨迹规划的概念 决策 横向规划 纵向规划 轨迹规划的概念: 轨迹规划的核心就是要解决车辆该怎么走的问题.比如我们知道了附近有行 ...
- Minimum Snap轨迹规划详解(2)corridor与时间分配
在上一篇文章中,我们得到的轨迹并不是很好,与路径差别有点大,我们期望规划出的轨迹跟路径大致重合,而且不希望有打结的现象,而且希望轨迹中的速度和加速度不超过最大限幅值.为了解决这些问题有两种思路: 思路 ...
- Minimum Snap轨迹规划详解(1)轨迹规划
一. 轨迹规划是什么? 在机器人导航过程中,如何控制机器人从A点移动到B点,通常称之为运动规划.运动规划一般又分为两步: 1.路径规划:在地图(栅格地图.四\八叉树.RRT地图等)中搜索一条从A点到B ...
随机推荐
- Spark 大数据平台
Apache Spark is an open source cluster computing system that aims to make data analytics fast - both ...
- UML 小结(1)- 整体阐述
前言: UML( Unified Modeling Language) 又称统一建模语言或标准建模语言,是始于1997年一个OMG标准,它是一个支持模型化和软件系统开发的图形 ...
- 【原创】jQuery插件 - Booklet翻书特效教程(一) 一般设置
jQuery插件 - Booklet翻书特效教程(一) 一般设置 本文由五月雨恋提供,转载请注明出处. 一.宽高(width/height) 1.自定义大小 $(function(){ // 自定义页 ...
- 怎样开启SQL数据库服务
使用数据库时开启服务是需要的,我给大家具体介绍几种方式开启SQL Sever 服务.这几种我都用图文的形式用三个开启方式给你展示,对于不会开启服务的朋友可以学习下,这些前提是你的电脑安装了SQL数据库 ...
- 2140: 稳定婚姻 - BZOJ
Description 我国的离婚率连续7年上升,今年的头两季,平均每天有近5000对夫妇离婚,大城市的离婚率上升最快,有研究婚姻问题的专家认为,是与简化离婚手续有关. 25岁的姗姗和男友谈恋爱半年就 ...
- segment fault
http://blog.chinaunix.net/uid-23069658-id-3959636.html
- 【转载】Spring加载resource时classpath*:与classpath:的区别
免责声明: 本文转自网络文章,转载此文章仅为个人收藏,分享知识,如有侵权,请联系博主进行删除. 原文作者:kyfxbl 原文地址: spring配置中classpath和cla ...
- CSS3属性box-shadow使用教程,css3box-shadow
CSS3的box-shadow属性可以让我们轻松实现图层阴影效果.我们来实战详解一下这个属性. 1. box-shadow属性的浏览器兼容性先来看一个这个属性的浏览器兼容性: Opera: 不知道是从 ...
- powerdesigner使用之——从“概念模型”到“物理模型”
现实问题在计算机上的解决,需要我们从现实问题中抽象出实体模型,然后再将实体模型对应到数据库关系表中. 例如,我们在思考学生选课,这件事情上,实体模型就是“学生”和“课程”两个 此时,我们使用power ...
- NYOJ-456 邮票分你一半 AC 分类: NYOJ 2014-01-02 14:33 152人阅读 评论(0) 收藏
#include<stdio.h> #define max(x,y) x>y?x:y int main(){ int n,x,y; scanf("%d",& ...