Hermite曲线插值
原文 Hermite Curve Interpolation
Hermite Curve Interpolation
Hamburg (Germany), the 30th March 1998. Written by Nils Pipenbrinck aka Submissive/Cubic & $eeN
Introduction
Hermite curves are very easy to calculate but also very powerful. They are used to smoothly interpolate between key-points (like object movement in keyframe animation or camera control). Understanding the mathematical background of hermite curves will help you to understand the entire family of splines. Maybe you have some experience with 3D programming and have already used them without knowing that (the so called kb-splines, curves with control over tension, continuity and bias are just a special form of the hermite curves).
The Math
To keep it simple we first start with some simple stuff. We also only talk about 2-dimensional curves here. If you need a 3D curve just do with the z-coordinate what you do with y or x. Hermite curves work in in any number of dimensions.
To calculate a hermite curve you need the following vectors:
- P1: the startpoint of the curve
- T1: the tangent (e.g. direction and speed) to how the curve leaves the startpoint
- P2: he endpoint of the curve
- T2: the tangent (e.g. direction and speed) to how the curves meets the endpoint
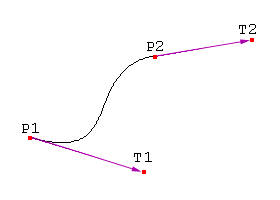
These 4 vectors are simply multiplied with 4 hermite basis functions and added together.
h1(s) = 2s^3 - 3s^2 + 1
h2(s) = -2s^3 + 3s^2
h3(s) = s^3 - 2s^2 + s
h4(s) = s^3 - s^2
Below are the 4 graphs of the 4 functions (from left to right: h1, h2, h3, h4).
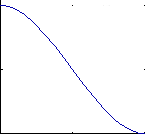
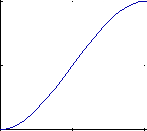
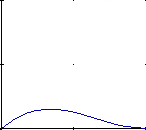
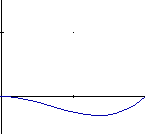
(all graphs except the 4th have been plotted from 0,0 to 1,1)
Take a closer look at functions h1 and h2:
- h1 starts at 1 and goes slowly to 0.
- h2 starts at 0 and goes slowly to 1.
Now multiply the startpoint with h1 and the endpoint with h2. Let s go from 0 to 1 to interpolate between start and endpoint. h3 and h4 are applied to the tangents in the same manner. They make sure that the curve bends in the desired direction at the start and endpoint.
The Math in Matrix Form
All this stuff can be expessed with some vector and matrix algebra. I think the matrix-form is much easier to understand.
Vector S: The interpolation-point and it's powers up to 3:
Vector C: The parameters of our hermite curve:
Matrix h: The matrix form of the 4 hermite polynomials: | s^3 | | P1 | | 2 -2 1 1 |
S = | s^2 | C = | P2 | h = | -3 3 -2 -1 |
| s^1 | | T1 | | 0 0 1 0 |
| 1 | | T2 | | 1 0 0 0 |
To calculate a point on the curve you build the Vector S, multiply it with the matrix h and then multiply with C.P = S * h * C
A little side-note: Bezier-Curves
This matrix-form is valid for all cubic polynomial curves. The only thing that changes is the polynomial matrix. For example, if you want to draw a Bezier curve instead of hermites you might use this matrix:
| -1 3 -3 1 |
b = | 3 -6 3 0 |
| -3 3 0 0 |
| 1 0 0 0 |
I wrote a separate page about bezier curves.
Some Pseudocode
Sure, this C-style pseudo-code won't compile. C doesn't come with a power function, and unless you wrote yourself a vector-class any compiler would generate hundreds of errors and make you feel like an idiot. I think it's better to present this code in a more abstract form.
moveto (P1); // move pen to startpoint
for (int t=0; t < steps; t++)
{
float s = (float)t / (float)steps; // scale s to go from 0 to 1
float h1 = 2s^3 - 3s^2 + 1; // calculate basis function 1
float h2 = -2s^3 + 3s^2; // calculate basis function 2
float h3 = s^3 - 2*s^2 + s; // calculate basis function 3
float h4 = s^3 - s^2; // calculate basis function 4
vector p = h1*P1 + // multiply and sum all funtions
h2*P2 + // together to build the interpolated
h3*T1 + // point along the curve.
h4*T2;
lineto (p) // draw to calculated point on the curve
}
Getting rid of the Tangents
I know... controlling the tangents is not easy. It's hard to guess what a curve will look like if you have to define it. Also, to make a sharply bending curve you have to drag the tangent-points far away from the curve. I'll now show you how you can turn the hermite curves into cardinal splines.
Cardinal splines
Cardinal splines are just a subset of the hermite curves. They don't need the tangent points because they will be calculated from the control points. We'll lose some of the flexibility of the hermite curves, but as a tradeoff the curves will be much easier to use. The formula for the tangents for cardinal splines is:
Ti = a * ( Pi+1 - Pi-1 )
a is a constant which affects the tightness of the curve. Write yourself a program and play around with it. ( a should be between 0 and 1, but this is not a must).
Catmull-Rom splines
The Catmull-Rom spline is again just a subset of the cardinal splines. You only have to define a as 0.5, and you can draw and interpolate Catmull-Rom splines.
Ti = 0.5 * ( P i+1 - Pi-1 )
Easy, isn't it? Take a math-book and look for Catmull-Rom splines. Try to understand how they work! It's damn difficult, but when they are derived from hermite curves the cardinal splines turn out to be very easy to understand. Catmull-Rom splines are great if you have some data-points and just want to interpolate smoothly between them.
The Kochanek-Bartels Splines (also called TCB-Splines)
Now we're going down to the guts of curve interpolation. The kb-splines (mostly known from Autodesk's 3d-Studio Max and Newtek's Lightwave) are nothing more than hermite curves and a handfull of formulas to calculate the tangents. These curves have been introduced by D. Kochanek and R. Bartels in 1984 to give animators more control over keyframe animation. They introduced three control-values for each keyframe point:
- Tension: How sharply does the curve bend?
- Continuity: How rapid is the change in speed and direction?
- Bias: What is the direction of the curve as it passes through the keypoint?
I won't try to derive the tangent-formulas here. I think just giving you something you can use is a better idea. (if you're interested you can ask me. I can write it down and send it to you via email.)
The "incoming" Tangent equation:
(1-t)*(1-c)*(1+b)
TS = ----------------- * ( P - P )
i 2 i i-1
(1-t)*(1+c)*(1-b)
+ ----------------- * ( P - P )
2 i+1 i
The "outgoing" Tangent equation:
(1-t)*(1+c)*(1+b)
TD = ----------------- * ( P - P )
i 2 i i-1
(1-t)*(1-c)*(1-b)
+ ----------------- * ( P - P )
2 i+1 i
When you want to interpolate the curve you should use this vector:
| P(i) |
C = | P(i+1) |
| TD(i) |
| TS(i+1) |
You might notice that you always need the previous and next point if you want to calculate the curve. This might be a problem when you try to calculate keyframe data from Lightwave or 3D-Studio. I don't know exactly how these programs handle the cases of the first and last point, but there are enough sources available on the internet. Just search around a little bit. (Newtek has a good developer section. You can download the origignal Lightwave motion code on their web-site).
Speed Control
If you write yourself keyframe-interpolation code and put it into a program you'll notice one problem. Unless you have your keyframes in fixed intervals you will have a sudden change of speed and direction whenever you pass a keyframe-point. This can be avoided if you take the number of key-positions (frames) between two keyframes into account:
N is the number of frames (seconds, whatever) between two keypoints.
2 * N
i-1
TD = TD * --------------- adjustment of outgoing tangent
i i N + N
i-1 i
2 * N
i
TS = TS * --------------- adjustment of incomming tangent
i i N + N
i-1 i
What about the "normal" Splines?
The other spline-types, beta-splines, uniform nonrational splines and all the others are a completely different thing and are not covered here. They share one thing with the hermite curves: They are still cubic polynomials, but the way they are calculated is different.
Final Words
Why does no-one care that it's almost impossible to do nicely formatted math-formulas in HTML? What's more important? Good design or good content? As always you might want to contact me.
Hermite曲线插值的更多相关文章
- 数值计算方法实验之Hermite 多项式插值 (Python 代码)
一.实验目的 在已知f(x),x∈[a,b]的表达式,但函数值不便计算,或不知f(x),x∈[a,b]而又需要给出其在[a,b]上的值时,按插值原则f(xi)= yi(i= 0,1…….,n)求出简单 ...
- Hermite (埃尔米特)曲线
Hermite 曲线 已知曲线的两个端点坐标P0.P1,和端点处的切线R0.R1,确定的一条曲线. 参数方程 1. 几何形式 2. 矩阵形式 3. 推导 例子分析 如上图有四个点,假如P0.P2是端点 ...
- 曲线参数化的Javascript实现(理论篇)
在关键帧动画的制作过程中,动画师在k物体运动的过程中,一般要确定2个参数: 1)运动轨迹(表示物体运动的路径): 2)速度曲线(表示物体随时间的速度变化). 对于运动轨迹通常选用一定的样条曲线,通过动 ...
- 【Unity3d游戏开发】游戏中的贝塞尔曲线以及其在Unity中的实现
RT,马三最近在参与一款足球游戏的开发,其中涉及到足球的各种运动轨迹和路径,比如射门的轨迹,高吊球,香蕉球的轨迹.最早的版本中马三是使用物理引擎加力的方式实现的足球各种运动,后来的版本中使用了根据物理 ...
- unity3D:游戏分解之曲线
一提到曲线,很多新手就头疼了,包括我.查了很多资料,终于有个大概的了解.想深入了解曲线原理的,推荐一个链接http://www.cnblogs.com/jay-dong/archive/2012/09 ...
- n阶贝塞尔曲线绘制(C/C#)
原文:n阶贝塞尔曲线绘制(C/C#) 贝塞尔是很经典的东西,轮子应该有很多的.求n阶贝塞尔曲线用到了 德卡斯特里奥算法(De Casteljau's Algorithm) 需要拷贝代码请直接使用本文最 ...
- 两点三次Hermiter插值C++代码
#include <math.h> #include <gl/glut.h> #include <iostream> using namespace std; st ...
- mapboxgl 中插值表达式的应用场景
目录 一.前言 二.语法 三.对地图颜色进行拉伸渲染 1. 热力图 2. 轨迹图 2. 模型网格渲染 四.随着地图缩放对图形属性进行插值 五.interpolate的高阶用法 六.总结 一.前言 in ...
- 贝塞尔曲线在Unity中的应用
前言:国庆放假后基本整个人的散掉了.加之种种原因,没时间没心情写博客.最近研究了一下3d的一些效果.其中有类似翻书撕纸的操作,可是一个panel怎么由平整的变成弯曲的呢? 两点可以确定一条直线,三点可 ...
随机推荐
- egreat a5 遥控器 AK82无线遥控器
[爆炸性消息]购买亿格瑞 A5 送 AK82 遥控器!! [复制链接] http://bbs.egreatworld.com/forum.php?mod=viewthread&tid=315 ...
- IdentityServer4实战 - JWT Token Issuer 详解
原文:IdentityServer4实战 - JWT Token Issuer 详解 一.前言 本文为系列补坑之作,拖了许久决定先把坑填完. 下文演示所用代码采用的 IdentityServer4 版 ...
- Drupal 7 模块开发 建立模块帮助信息(hook_help)
建立模块请參考 <Drupal 7 模块开发 建立> 假设你要支持中文,文件格式必须保存为 UTF-8.NO BOM ------------------------------ hook ...
- string与QString之间的转换(两种方法:fromStdString直接转换,或者fromLocal8Bit(cstr.c_str())
string str;QString qstr; //从QString 到 std::stringstr = qstr.toStdString(); //从std::string 到QStringqs ...
- ZOJ 3209 Treasure Map DLX
用最少的矩阵覆盖n*m的地图.注意矩阵不能互相覆盖. 这里显然是一个精确覆盖,但因为矩阵拼接过程中,有公共的边,这里须要的技巧就是把矩阵的左边和以下截去一个单位. #include <stdio ...
- [Angular] Difference between Providers and ViewProviders
For example we have a component: class TodoList { private todos: Todo[] = []; add(todo: Todo) {} rem ...
- 2014-07-20 体验到的不是北漂easy
北京首出租天,房子很潮,这房子我住了一个多月,我希望我真的不会活得很长,世界上只有一个真正的租房,只有明确的家是最好的. 550每月,不包括水电费.我不知道该怎么形容,房间里闪耀的太阳.一个窗口,一扇 ...
- NOIP2016 天天爱跑步 - 树上差分
传送门 题目分析: 一年前还是个傻子的时候居然直接放弃了这题. 首先列出两个方程:如果i节点的观察员能够观察到由s->t的那个人,那么: \[dep[s] - dep[i] = w[i], de ...
- 【codeforces 777B】Game of Credit Cards
[题目链接]:http://codeforces.com/contest/777/problem/B [题意] 等价题意: 两个人都有n个数字, 然后两个人的数字进行比较; 数字小的那个人得到一个嘲讽 ...
- Swagger与postman使用心得
Swagger接口文档,在线自动生成模板和页面.服务器地址加上swagger-ui.html后缀即可访问到(https://域名:端口号/swagger-ui.html). 使用时在java代码中引用 ...