窗口看门狗 WWDG
一,窗口看门狗
二,喂狗注意事项
三,程序设计
1.检查复位状态,有助于观察当前工作的可靠性
/* Check if the system has resumed from WWDG reset ,检查是否窗口看门狗导致的复位,如果发现由窗口看门狗导致的复位,输出打印信息*/
if (RCC_GetFlagStatus(RCC_FLAG_WWDGRST) != RESET)
{
/* WWDGRST flag set */
printf("wwdg reset cpu\r\n"); /* Clear reset flags */
RCC_ClearFlag();
}
else
{
/* WWDGRST flag is not set */
printf("normal reset cpu\r\n");
} delay_ms();delay_ms();
2. 看门狗的初始化
/* WWDG configuration ,窗口看门狗的配置*/
/* Enable WWDG clock ,使能看门狗的时钟*/
RCC_APB1PeriphClockCmd(RCC_APB1Periph_WWDG, ENABLE); /* 窗口看门狗的时钟 = (PCLK1 (42MHz)/4096)/8 = 1281 Hz (~780 us) */
WWDG_SetPrescaler(WWDG_Prescaler_8); /* Set Window value to 80; WWDG counter should be refreshed only when the counter
is below 80 (and greater than 0x40) otherwise a reset will be generated
设置窗口的上限值为80
*/
WWDG_SetWindowValue(); /* 设置计数值的初值为127,则窗口看门狗的超时时间 = 780 us * 64 = 49.92 ms
这个时候窗口刷新时间如下
~780 * (127-80) = 36.6ms < refresh window < ~780 * 64 = 49.9ms */
WWDG_Enable(); //WWDG NVIC 配置
NVIC_InitStructure.NVIC_IRQChannel = WWDG_IRQn; //窗口看门狗中断通道
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=; //抢占优先级0
NVIC_InitStructure.NVIC_IRQChannelSubPriority =; //子优先级0
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道使能
NVIC_Init(&NVIC_InitStructure); //根据指定的参数初始化VIC寄存器 //清空提前唤醒中断标志位
WWDG_ClearFlag(); //使能提前唤醒中断
WWDG_EnableIT();

3. 看门狗中断服务函数
void WWDG_IRQHandler(void)
{
if(WWDG_GetFlagStatus()==SET)
{
//进行喂狗
WWDG_SetCounter(); //清空提前唤醒中断标志位
WWDG_ClearFlag(); }
}
#include "stm32f4xx.h"
#include "stm32f4xx_gpio.h"
#include "stm32f4xx_rcc.h"
#include "stm32f4xx_usart.h"
#include "stdio.h"
#include "sys.h" static GPIO_InitTypeDef GPIO_InitStructure;
static USART_InitTypeDef USART_InitStructure;
static NVIC_InitTypeDef NVIC_InitStructure; //重定义fputc函数
int fputc(int ch, FILE *f)
{
USART_SendData(USART1,ch);
while(USART_GetFlagStatus(USART1,USART_FLAG_TXE)==RESET); return ch;
} void delay_us(uint32_t nus)
{
uint32_t temp;
SysTick->LOAD =SystemCoreClock//*nus; //时间加载
SysTick->VAL =0x00; //清空计数器
SysTick->CTRL|=SysTick_CTRL_ENABLE_Msk ; //使能滴答定时器开始倒数
do
{
temp=SysTick->CTRL;
}while((temp&0x01)&&!(temp&(<<))); //等待时间到达
SysTick->CTRL&=~SysTick_CTRL_ENABLE_Msk; //关闭计数器
SysTick->VAL =0X00; //清空计数器
} void delay_ms(uint16_t nms)
{
uint32_t temp;
SysTick->LOAD=SystemCoreClock//*nms; //时间加载(SysTick->LOAD为24bit)
SysTick->VAL =0x00; //清空计数器
SysTick->CTRL|=SysTick_CTRL_ENABLE_Msk ; //能滴答定时器开始倒数
do
{
temp=SysTick->CTRL;
}while((temp&0x01)&&!(temp&(<<))); //等待时间到达
SysTick->CTRL&=~SysTick_CTRL_ENABLE_Msk; //关闭计数器
SysTick->VAL =0X00; //清空计数器
} void LED_Init(void)
{ //使能GPIOE,GPIOF时钟
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOE | RCC_AHB1Periph_GPIOF, ENABLE); //GPIOF9,F10初始化设置
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9 | GPIO_Pin_10; //LED0和LED1对应IO口
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_OUT; //普通输出模式,
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; //推挽输出,驱动LED需要电流驱动
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz; //100MHz
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP; //上拉
GPIO_Init(GPIOF, &GPIO_InitStructure); //初始化GPIOF,把配置的数据写入寄存器 //GPIOE13,PE14初始化设置
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_13 | GPIO_Pin_14; //LED2和LED3对应IO口
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_OUT; //普通输出模式
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; //推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz; //100MHz
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP; //上拉
GPIO_Init(GPIOE, &GPIO_InitStructure); //初始化GPIOE,把配置的数据写入寄存器 GPIO_SetBits(GPIOF,GPIO_Pin_9 | GPIO_Pin_10); //GPIOF9,PF10设置高,灯灭
GPIO_SetBits(GPIOE,GPIO_Pin_13 | GPIO_Pin_14);
} void USART1_Init(uint32_t baud)
{
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA,ENABLE); //使能GPIOA时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1,ENABLE); //使能USART1时钟 //串口1对应引脚复用映射
GPIO_PinAFConfig(GPIOA,GPIO_PinSource9,GPIO_AF_USART1); //GPIOA9复用为USART1
GPIO_PinAFConfig(GPIOA,GPIO_PinSource10,GPIO_AF_USART1); //GPIOA10复用为USART1 //USART1端口配置
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9 | GPIO_Pin_10; //GPIOA9与GPIOA10
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF; //复用功能
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //速度50MHz
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; //推挽复用输出
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP; //上拉
GPIO_Init(GPIOA,&GPIO_InitStructure); //初始化PA9,PA10 //USART1 初始化设置
USART_InitStructure.USART_BaudRate = baud; //波特率设置
USART_InitStructure.USART_WordLength = USART_WordLength_8b; //字长为8位数据格式
USART_InitStructure.USART_StopBits = USART_StopBits_1; //一个停止位
USART_InitStructure.USART_Parity = USART_Parity_No; //无奇偶校验位
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None; //无硬件数据流控制
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //收发模式
USART_Init(USART1, &USART_InitStructure); //初始化串口1 USART_Cmd(USART1, ENABLE); //使能串口1 USART_ITConfig(USART1, USART_IT_RXNE, ENABLE); //开启相关中断 //Usart1 NVIC 配置
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn; //串口1中断通道
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=; //抢占优先级3
NVIC_InitStructure.NVIC_IRQChannelSubPriority =; //子优先级3
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道使能
NVIC_Init(&NVIC_InitStructure); //根据指定的参数初始化VIC寄存器
} int main(void)
{ LED_Init(); //系统定时器初始化,时钟源来自HCLK,且进行8分频,
//系统定时器时钟频率=168MHz/8=21MHz
SysTick_CLKSourceConfig(SysTick_CLKSource_HCLK_Div8); //设置中断优先级分组2
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); //串口1,波特率115200bps,开启接收中断
USART1_Init(); /* Check if the system has resumed from WWDG reset ,检查是否窗口看门狗导致的复位,如果发现由窗口看门狗导致的复位,输出打印信息*/
if (RCC_GetFlagStatus(RCC_FLAG_WWDGRST) != RESET)
{
/* WWDGRST flag set */
printf("wwdg reset cpu\r\n"); /* Clear reset flags */
RCC_ClearFlag();
}
else
{
/* WWDGRST flag is not set */
printf("normal reset cpu\r\n");
} delay_ms();delay_ms(); /* WWDG configuration ,窗口看门狗的配置*/
/* Enable WWDG clock ,使能看门狗的时钟*/
RCC_APB1PeriphClockCmd(RCC_APB1Periph_WWDG, ENABLE); /* 窗口看门狗的时钟 = (PCLK1 (42MHz)/4096)/8 = 1281 Hz (~780 us) */
WWDG_SetPrescaler(WWDG_Prescaler_8); /* Set Window value to 80; WWDG counter should be refreshed only when the counter
is below 80 (and greater than 0x40) otherwise a reset will be generated
设置窗口的上限值为80
*/
WWDG_SetWindowValue(); /* 设置计数值的初值为127,则窗口看门狗的超时时间 = 780 us * 64 = 49.92 ms
这个时候窗口刷新时间如下
~780 * (127-80) = 36.6ms < refresh window < ~780 * 64 = 49.9ms */
WWDG_Enable(); //WWDG NVIC 配置
NVIC_InitStructure.NVIC_IRQChannel = WWDG_IRQn; //窗口看门狗中断通道
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=; //抢占优先级0
NVIC_InitStructure.NVIC_IRQChannelSubPriority =; //子优先级0
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道使能
NVIC_Init(&NVIC_InitStructure); //根据指定的参数初始化VIC寄存器 //清空提前唤醒中断标志位
WWDG_ClearFlag(); //使能提前唤醒中断
WWDG_EnableIT(); while()
{
#if 0
//进行喂狗
WWDG_SetCounter(); //清空提前唤醒中断标志位
WWDG_ClearFlag();
#endif }
} void WWDG_IRQHandler(void)
{
if(WWDG_GetFlagStatus()==SET)
{
//进行喂狗
WWDG_SetCounter(); //清空提前唤醒中断标志位
WWDG_ClearFlag(); }
} void USART1_IRQHandler(void) //串口1中断服务程序
{
uint8_t d; if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET) //接收中断
{ }
}
wwdg.c
窗口看门狗 WWDG的更多相关文章
- stm32 窗口看门狗 WWDG
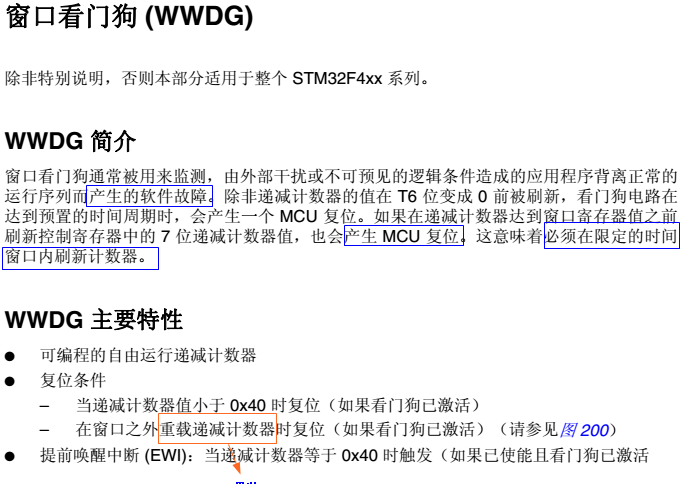
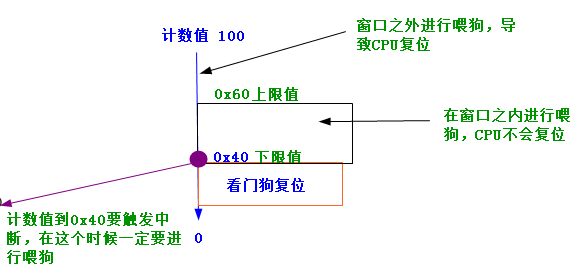
窗口看门狗WWDG其实和独立看门狗类似,它是一个7位递减计数器不断的往下递减计数,当减到一个固定值0x40时还不喂狗的话,产生一个MCU复位,这个值叫窗口的下限,是固定的值,不能改变 窗口看门狗(WW ...
- STM32之独立看门狗(IWDG)与窗口看门狗(WWDG)总结
一.独立看门狗 STM32 的独立看门狗由内部专门的 40Khz 低速时钟驱动,即使主时钟发生故障,它也仍然有效. 看门狗的原理:单片机系统在外界的干扰下会出现程序跑飞的现象导致出现死循环,看门狗电路 ...
- STM32窗口看门狗WWDG库函数的一点思考
WWDG当前计数器的值以及激活位和WWDG_CR这个寄存器相关.如下图所示: 而STM32f10x的库函数提供了两种设置WWDG_CR[0:6]位的方式. WWDG_SetCounter方法 #def ...
- 嵌入式02 STM32 实验09 独立/窗口看门狗
一.独立看门狗和窗口看门狗 看门狗:单片机系统在外界的干扰下会出现程序跑飞的现象导致死循环,或者崩溃,看门狗电路就是为了避免这种情况的发生,看门狗的作用就是在一定的事件内(通过计数器实现)若没有收到喂 ...
- 第35章 WWDG—窗口看门狗—零死角玩转STM32-F429系列
第35章 WWDG—窗口看门狗 全套200集视频教程和1000页PDF教程请到秉火论坛下载:www.firebbs.cn 野火视频教程优酷观看网址:http://i.youku.com/fir ...
- STM32之独立看门狗与窗口看门狗总结
一.独立看门狗 STM32 的独立看门狗由内部专门的 40Khz 低速时钟驱动,即使主时钟发生故障,它也仍然有效. 看门狗的原理:单片机系统在外界的干扰下会出现程序跑飞的现象导致出现死循环,看门狗电路 ...
- stm8的独立看门狗与窗口看门狗
STM8拥有两个硬件看门狗,分别叫做独立看门狗和窗口看门狗 独立看门狗的框图如下 我们可以看到,独立看门狗的时钟来自于LSI内部低速振荡器,经过二分频到达看门狗外设单元,在经过一个七位的预分频到达计数 ...
- STM32(10)——窗口看门狗
简介: 窗口看门狗(WWDG)通常被用来监测由外部干扰或不可预见的逻辑条件造成的应用程序背离正常的运行序列而产生的软件故障.除非递减计数器的值在 T6 位 (WWDG->CR 的第六位)变成 0 ...
- stm32 窗口看门狗学习(二)
窗口看门狗有一个提前唤醒中断,如果开启这个中断,那么当计数器的值达到0x40的时候就会产生这个中断. 上次的代码加一点就可以做这个实验了. void WWDG_Init(u8 tr,u8 wr,u32 ...
随机推荐
- PAT(B) 1072 开学寄语(Java)统计
题目链接:1072 开学寄语 (20 point(s)) 题目描述 下图是上海某校的新学期开学寄语:天将降大任于斯人也,必先删其微博,卸其 QQ,封其电脑,夺其手机,收其 ipad,断其 wifi,使 ...
- WUSTOJ 1311: 开心的金明(Java)动态规划-01背包
题目链接:
- docker 实践七:docker-machine
本篇是关于 docker 三剑客中的 docker machine. 注:环境为 CentOS7,docker 19.03. docker-machine 是 docker 官方三剑客项目之一,它是一 ...
- MySQL监控&性能瓶颈排查
监控的意义&目的 业务/数据库服务是否可用 通过事务实时性能数据变化感知业务的变化 数据库性能变化趋势判断服务器资源是否足够 数据可靠性 业务数据是否可靠 服务可用,不代表数据就是正确的 有可 ...
- CH08 QSPI启动并从EMMC运行APP
8.1 概述 在前一节课,我们必须手动挂载TF卡到mnt,然后输入./a.out程序才能启动.而在嵌入式系统里面,我们很多时候需要实现开机启动程序.很多时候我们会把程序固化到FLASH,然后从EMMC ...
- Map、Set的基本概括
Map: 在运用map和set 集合之前首先要弄清楚它们的基本定义是什么. 简介:map是一种关联式容器,但是她储存方式是以键值对(key/value)存在的. Map用法: 定义Map集合并往集合中 ...
- Java 8 新特性--Lambda表达式作为方法参数
Lambda表达式的使用场景: 当方法的参数是一个函数式接口时,可以使用Lambda表达式进行简化—— 首先,前提是Runnable接口是一个函数式接口,经过查看源码得知,确实如此: 将Runnabl ...
- 怎样解决Script error报错问题
如果脚本网址与网页网址不在同一个域(比如使用了 CDN), 那如果这个脚本执行报错了, 就会报:Script error. 由于同源策略, 浏览器禁止向外部脚本泄漏信息, 因此不会提供完整的报错信息, ...
- Windows下的Android Studio环境搭建、安装使用
https://jingyan.baidu.com/article/20b68a88ff2ca4796cec6232.html https://blog.csdn.net/jklinux/articl ...
- Snort Rule Infographic
Snort Rule Infographic Official Documentation Snort FAQ Snort Team / Open Source Community Snort Us ...