【翻译】Kinect v2程序设计(C++) BodyIndex篇
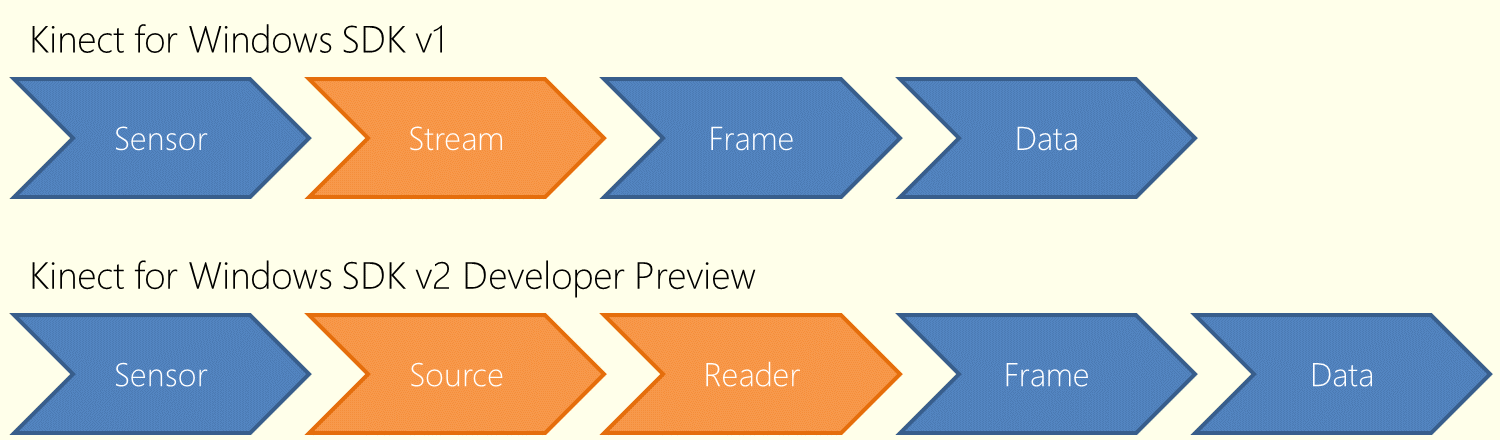
通过Kinect SDK v2预览版,取得BodyIndex(人体区域)的方法和示例代码。
图1 Kinect SDK v2预览版的示例程序(BodyBasics)
// Sensor
IKinectSensor* pSensor; ……
HRESULT hResult = S_OK;
hResult = GetDefaultKinectSensor( &pSensor ); ……
if( FAILED( hResult ) ){
std::cerr << "Error : GetDefaultKinectSensor" << std::endl;
return -;
}
hResult = pSensor->Open(); ……
if( FAILED( hResult ) ){
std::cerr << "Error : IKinectSensor::Open()" << std::endl;
return -;
}
// Source
IBodyIndexFrameSource* pBodyIndexSource; ……
hResult = pSensor->get_BodyIndexFrameSource( &pBodyIndexSource ); ……
if( FAILED( hResult ) ){
std::cerr << "Error : IKinectSensor::get_BodyIndexFrameSource()" << std::endl;
return -;
}
// Reader
IBodyIndexFrameReader* pBodyIndexReader; ……
hResult = pBodyIndexSource->OpenReader( &pBodyIndexReader ); ……
if( FAILED( hResult ) ){
std::cerr << "Error : IBodyIndexFrameSource::OpenReader()" << std::endl;
return -;
}
int width = ; ……
int height = ; ……
cv::Mat bodyIndexMat( height, width, CV_8UC3 ); ……
cv::namedWindow( "BodyIndex" );
// Color Table
cv::Vec3b color[]; ……
color[] = cv::Vec3b( , , );
color[] = cv::Vec3b( , , );
color[] = cv::Vec3b( , , );
color[] = cv::Vec3b( , , );
color[] = cv::Vec3b( , , );
color[] = cv::Vec3b( , , );
while( ){
// Frame
IBodyIndexFrame* pBodyIndexFrame = nullptr; ……
hResult = pBodyIndexReader->AcquireLatestFrame( &pBodyIndexFrame ); ……
if( SUCCEEDED( hResult ) ){
unsigned int bufferSize = ;
unsigned char* buffer = nullptr;
hResult = pBodyIndexFrame->AccessUnderlyingBuffer( &bufferSize, &buffer ); ……
if( SUCCEEDED( hResult ) ){
for( int y = ; y < height; y++ ){
for( int x = ; x < width; x++ ){
unsigned int index = y * width + x;
if( buffer[index] != 0xff ){
bodyIndexMat.at<cv::Vec3b>( y, x ) = color[buffer[index]]; ……
}
else{
bodyIndexMat.at<cv::Vec3b>( y, x ) = cv::Vec3b( , , ); ……
}
}
}
}
}
SafeRelease( pBodyIndexFrame );
// Show Window
cv::imshow( "BodyIndex", bodyIndexMat );
if( cv::waitKey( ) == VK_ESCAPE ){
break;
}
}
| Kinect SDK v1 | Kinect SDK v2预览版 | |
|---|---|---|
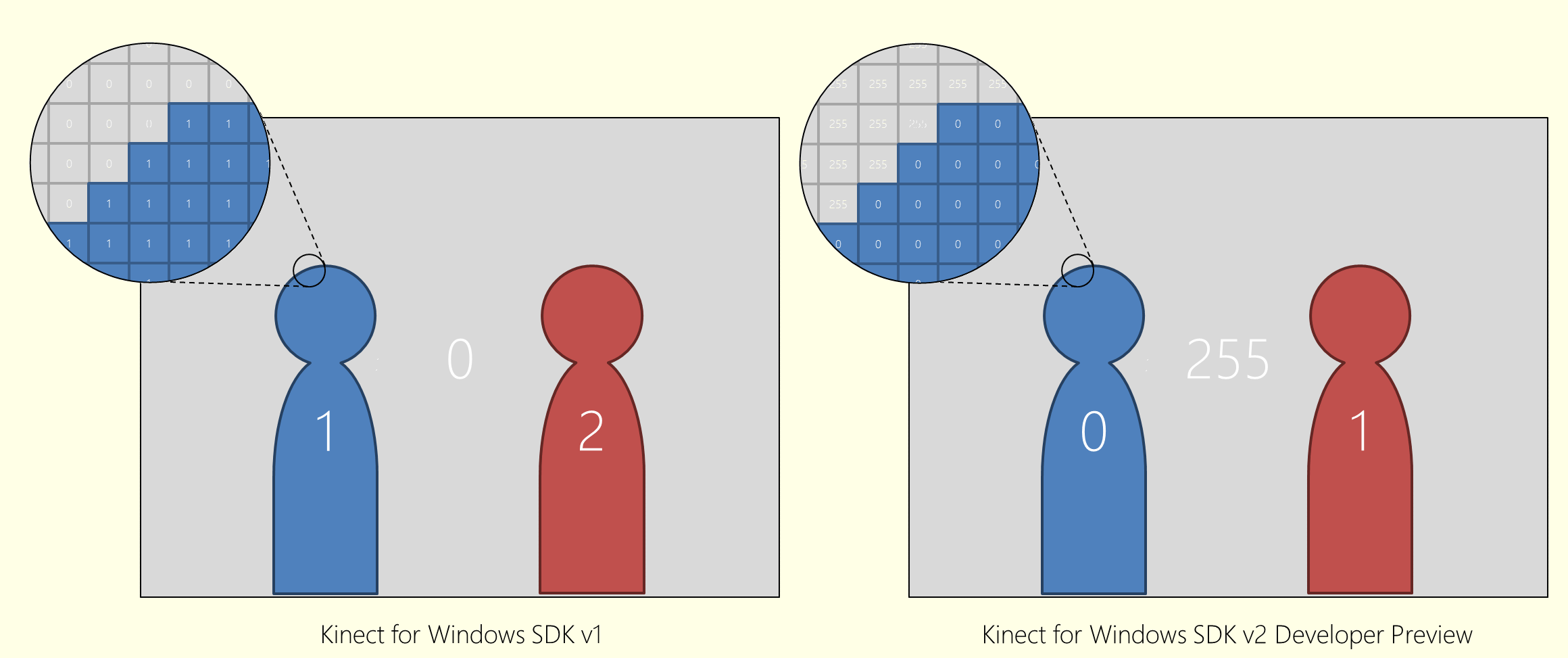
| 名称 | Player | BodyIndex |
| 检测支持人数 | 6人 | 6人 |
| 人体領域的値 | 1~6 | 0~5 |
| 非人体領域的値 | 0 | 255(0xff) |

【翻译】Kinect v2程序设计(C++) BodyIndex篇的更多相关文章
- 【翻译】Kinect v2程序设计(C++) Body 篇
Kinect SDK v2预览版的主要功能的使用介绍,基本上完成了.这次,是关于取得Body(人体姿势)方法的说明. 上一节,是使用Kinect SDK v2预览版从Kinect v2预览版取得B ...
- 【翻译】Kinect v2程序设计(C++-) AudioBeam篇
Kinect v2,Microphone Array可以用来对于水平面音源方向的推测(AudioBeam)和语音识别(Speech Recognition).这一节是介绍如何取得AudioBeam. ...
- 【翻译】Kinect v2程序设计(C++) Color篇
Kinect SDK v2预览版,获取数据的基本流程的说明.以及取得Color图像的示例程序的介绍. 上一节,是关于当前型号Kinect for Windows(后面称作Kinect v1)和次世代型 ...
- 【翻译】Kinect v2程序设计(C++) Depth编
Kinect SDK v2预览版,取得Depth数据的方法说明. 上一节,介绍了通过使用Kinect for Windows SDK v2预览版(以下简称为,Kinect SDK v2预览版)从Kin ...
- 【翻译】Kinect v1和Kinect v2的彻底比较
本连载主要是比较Kinect for Windows的现行版(v1)和次世代型的开发者预览版(v2),以C++开发者为背景介绍进化的硬件和软件.本文主要是对传感的配置和运行条件进行彻底的比较. ...
- 【计算机视觉】深度相机(五)--Kinect v2.0
原文:http://blog.csdn.NET/qq1175421841/article/details/50412994 ----微软Build2012大会:Kinect for Windows P ...
- 【计算机视觉】深度相机(六)--Kinect v2.0 手势样本库制作
目录为1.如何使用Kinect Studio录制手势剪辑:2.如何使用Visual Gesture Builder创建手势项目:3.如何在我的C#程序中使用手势:4.关于录制.剪辑手势过程中的注意事项 ...
- Kinect v2.0 for windows开发环境说明
官方文档里是这些: Supported Operating Systems and Architectures The following operating systems and architec ...
- Kinect v2(Microsoft Kinect for Windows v2 )配置移动电源解决方案
Kinect v2配置移动电源解决方案 Kinect v2如果用于移动机器人上(也可以是其他应用场景),为方便有效地展开后续工作,为其配置移动电源是十分必要的. 一.选择移动电源 Kinect v2原 ...
随机推荐
- ping: unknown host www.baidu.com
#注意有很多的DNS服务器 为了防止DDOS攻击 所以都禁止PING [root@86 ~]# ping -c 2 www.baidu.com ping: unknown host www.baidu ...
- SL4A
参考文章:http://my.oschina.net/u/1468102/blog/208687 如何安装使用SL4A http://www.ibm.com/developerworks/cn/mob ...
- CM12同步源码及编译教程
同时提供基于安卓5.0的MKL魔趣猪扒饭编译教程~[玩机组出品]魔趣猪扒饭MKL50.1编译教程http://www.oneplusbbs.com/forum.php?mod=viewthread&a ...
- C#控制管理VisualSVN Server
VisualSVN Server可以用WMI接口管理(Windows Management Instrumentation). VisualSVN Server安装的计算机中,位于%VISUALSVN ...
- C编译: 动态连接库 (.so文件)
转自:http://www.cnblogs.com/vamei/archive/2013/04/04/2998850.html 在“纸上谈兵: 算法与数据结构”中,我在每一篇都会有一个C程序,用于实现 ...
- jmeter性能测试实战-web登录测试
一.项目背景: 网站信息: 操作系统类型 二.需求: 登录并发测试 三.场景: 1s增加两个线程,运行2000次 分别看20.40.60并发下的表现 四.监控: 成功率.响应时间.标准差.cpu.me ...
- XML的验证模式
XML文件的验证模式保证了XML文件的正确性,而比较常用的验证模式有两种:DTD和XSD. DTD与XSD区别 DTD(Document Type Definition)即文档类型定义,是一种XML约 ...
- .NET 4.0中的泛型的协变和逆变
转自:http://www.cnblogs.com/jingzhongliumei/archive/2012/07/02/2573149.html 先做点准备工作,定义两个类:Animal类和其子类D ...
- VMware12版虚拟机怎么安装win7系统
工具/原料 VMware workstation 12 windows7镜像ios系统文件 链接:http://pan.baidu.com/s/1c0YrDgG 密码:vna1 建立一个新的虚拟机 ...
- .net如何把导数据入到Excel
using System;using System.Collections.Generic;using System.Linq;using System.Web;using System.Web.UI ...