项目(1-1)ES32获取mpu9250数据网页交互显示
教程 https://www.hackster.io/donowak/esp32-mpu9250-3d-orientation-visualisation-467dc1
项目地址 https://github.com/DominikN/ESP32-MPU9250-web-view/blob/master/html.h

硬件地址
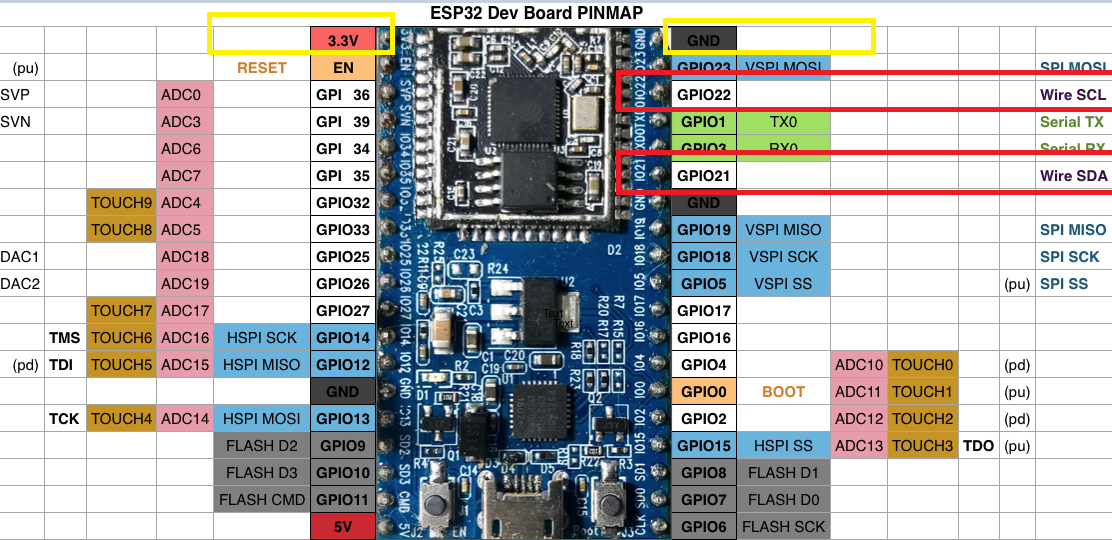
ESP32 <-> MPU9250
P22 <-> SCL
P21 <-> SDA
P19 <-> INT
GND <-> GND版型1(中国深圳常买到)
版型2(日本开发板)
https://www.switch-science.com/catalog/3210

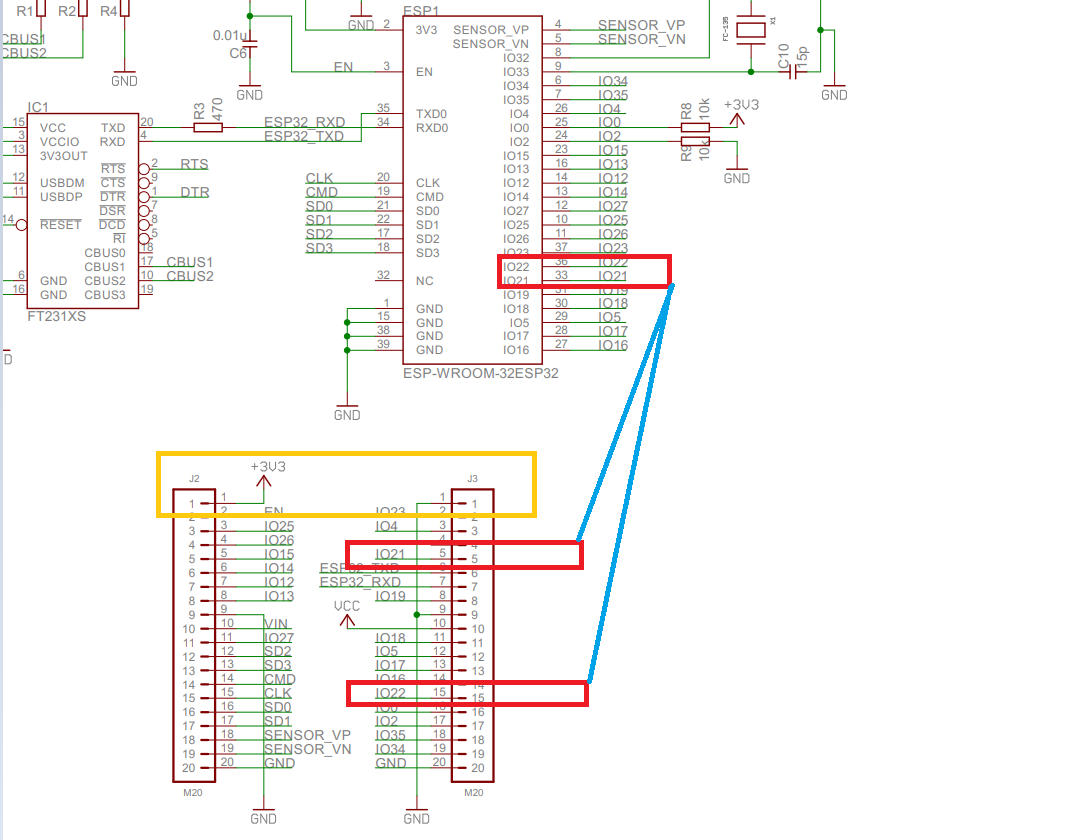
电路图
软件
配置Arduino IDE
要运行该项目,首先需要配置Arduino IDE:
1.为ESP32安装Husarnet软件包:
- 打开
File -> Preferences - 在字段中,其他Board Manager URL 添加以下链接:
https://files.husarion.com/arduino/package_esp32_index.json - 打开
Tools -> Board: ... -> Boards Manager ... - 搜索
esp32-husarnet by Husarion - 单击安装按钮
2.选择ESP32开发板:
- 打开
Tools -> Board - 选择“ESP32 Arduino(Husarnet)”部分下的ESP32开发模块
3.安装ArduinoJson库:(可不安装)
- 打开
Tools -> Manage Libraries... - 搜索
ArduinoJson - 选择版本
5.13.3 - 单击安装按钮
4.安装arduinoWebSockets库(Husarnet fork):(可不安装)
- 下载https://github.com/husarnet/arduinoWebSockets作为ZIP文件(这是由Links2004(Markus)提供的arduinoWebSockets的Husarnet兼容分支)
- 打开
Sketch -> Include Library -> Add .ZIP Library ...选择刚下载的arduinoWebSockets-master.zip 文件,然后单击打开按钮
5.安装SparkFun_MPU-9250-DMP_Arduino_Library:(必须安装)
- 下载https://github.com/sparkfun/SparkFun_MPU-9250-DMP_Arduino_Library作为ZIP文件
- 打开
Sketch -> Include Library -> Add .ZIP Library ...选择您刚刚下载的SparkFun_MPU-9250-DMP_Arduino_Library-master.zip 文件并单击打开按钮

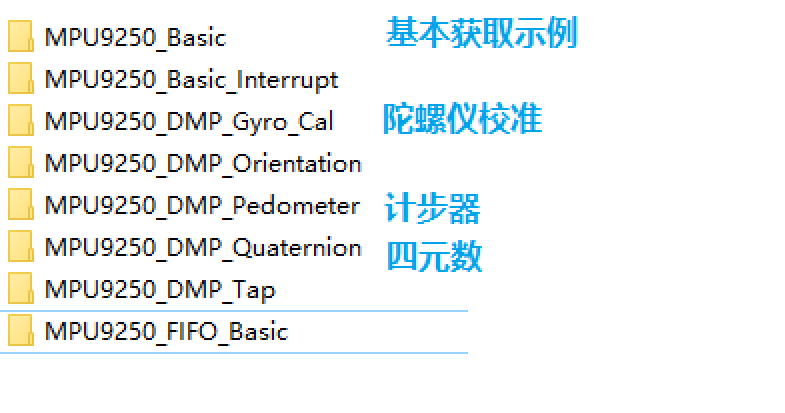
基本读取示例

/************************************************************
MPU9250_Basic
Basic example sketch for MPU-9250 DMP Arduino Library
Jim Lindblom @ SparkFun Electronics
original creation date: November 23, 2016
https://github.com/sparkfun/SparkFun_MPU9250_DMP_Arduino_Library This example sketch demonstrates how to initialize the
MPU-9250, and stream its sensor outputs to a serial monitor. Development environment specifics:
Arduino IDE 1.6.12
SparkFun 9DoF Razor IMU M0 Supported Platforms:
- ATSAMD21 (Arduino Zero, SparkFun SAMD21 Breakouts)
*************************************************************/
#include <SparkFunMPU9250-DMP.h> #define SerialPort Serial MPU9250_DMP imu; void setup()
{
SerialPort.begin(115200); // Call imu.begin() to verify communication with and
// initialize the MPU-9250 to it's default values.
// Most functions return an error code - INV_SUCCESS (0)
// indicates the IMU was present and successfully set up
if (imu.begin() != INV_SUCCESS)
{
while (1)
{
SerialPort.println("Unable to communicate with MPU-9250");
SerialPort.println("Check connections, and try again.");
SerialPort.println();
delay(5000);
}
} // Use setSensors to turn on or off MPU-9250 sensors.
// Any of the following defines can be combined:
// INV_XYZ_GYRO, INV_XYZ_ACCEL, INV_XYZ_COMPASS,
// INV_X_GYRO, INV_Y_GYRO, or INV_Z_GYRO
// Enable all sensors:
imu.setSensors(INV_XYZ_GYRO | INV_XYZ_ACCEL | INV_XYZ_COMPASS); // Use setGyroFSR() and setAccelFSR() to configure the
// gyroscope and accelerometer full scale ranges.
// Gyro options are +/- 250, 500, 1000, or 2000 dps
imu.setGyroFSR(2000); // Set gyro to 2000 dps
// Accel options are +/- 2, 4, 8, or 16 g
imu.setAccelFSR(2); // Set accel to +/-2g
// Note: the MPU-9250's magnetometer FSR is set at
// +/- 4912 uT (micro-tesla's) // setLPF() can be used to set the digital low-pass filter
// of the accelerometer and gyroscope.
// Can be any of the following: 188, 98, 42, 20, 10, 5
// (values are in Hz).
imu.setLPF(5); // Set LPF corner frequency to 5Hz // The sample rate of the accel/gyro can be set using
// setSampleRate. Acceptable values range from 4Hz to 1kHz
imu.setSampleRate(10); // Set sample rate to 10Hz // Likewise, the compass (magnetometer) sample rate can be
// set using the setCompassSampleRate() function.
// This value can range between: 1-100Hz
imu.setCompassSampleRate(10); // Set mag rate to 10Hz
} void loop()
{
// dataReady() checks to see if new accel/gyro data
// is available. It will return a boolean true or false
// (New magnetometer data cannot be checked, as the library
// runs that sensor in single-conversion mode.)
if ( imu.dataReady() )
{
// Call update() to update the imu objects sensor data.
// You can specify which sensors to update by combining
// UPDATE_ACCEL, UPDATE_GYRO, UPDATE_COMPASS, and/or
// UPDATE_TEMPERATURE.
// (The update function defaults to accel, gyro, compass,
// so you don't have to specify these values.)
imu.update(UPDATE_ACCEL | UPDATE_GYRO | UPDATE_COMPASS);
printIMUData();
}
} void printIMUData(void)
{
// After calling update() the ax, ay, az, gx, gy, gz, mx,
// my, mz, time, and/or temerature class variables are all
// updated. Access them by placing the object. in front: // Use the calcAccel, calcGyro, and calcMag functions to
// convert the raw sensor readings (signed 16-bit values)
// to their respective units.
float accelX = imu.calcAccel(imu.ax);
float accelY = imu.calcAccel(imu.ay);
float accelZ = imu.calcAccel(imu.az);
float gyroX = imu.calcGyro(imu.gx);
float gyroY = imu.calcGyro(imu.gy);
float gyroZ = imu.calcGyro(imu.gz);
float magX = imu.calcMag(imu.mx);
float magY = imu.calcMag(imu.my);
float magZ = imu.calcMag(imu.mz); SerialPort.println("Accel: " + String(accelX) + ", " +
String(accelY) + ", " + String(accelZ) + " g");
SerialPort.println("Gyro: " + String(gyroX) + ", " +
String(gyroY) + ", " + String(gyroZ) + " dps");
SerialPort.println("Mag: " + String(magX) + ", " +
String(magY) + ", " + String(magZ) + " uT");
SerialPort.println("Time: " + String(imu.time) + " ms");
SerialPort.println();
}
更多程序
http上传程序
项目(1-1)ES32获取mpu9250数据网页交互显示的更多相关文章
- easyui panel异步获取后台数据在前台显示
我在使用easyui的时候,想做一个向下图所示的效果,这个panel的样式已经做好了,想从后台异步获取json数据,然后填入到文本框中,不知道哪位大神能给点指导?万分感谢! 放入表单中,使用form对 ...
- 项目(1-2)ES32获取mpu9250传入数据库
. 报一个错,找不到min函数 #define min(X,Y) ((X) < (Y) ? (X) : (Y)) 手动添加 之后不报错了 .最原始的采集 /******************* ...
- 用非GUI模式执行测试,jp@gc - PerfMon Metrics Collector会出现无法获取正确数据的解决办法
用非GUI模式执行测试,jp@gc - PerfMon Metrics Collector会出现无法获取正确数据(实际显示的是Response Times Over Time),解决办法:在GUI模式 ...
- JaveWeb 公司项目(3)----- 通过Thrift端口获取数据库数据
前面两篇博客的内容主要是界面搭建的过程,随着界面搭建工作的完成,网页端需要加入数据,原先的B/S架构中C#通过Thrift接口获取数据,所以在网页端也沿用这个设计 首先,新建一个Maven下的Web项 ...
- java的IO流包装不当导致从网页获取的数据出现乱码
从网页上获取数据时必须要注意字符集的问题.处理不慎确实苦不堪言. 例如通过URL连接时,将字节流InputStream包装成字符流(以便直接存为String)时,一定要注意加上charsetName这 ...
- python获取数据网页数据并创建文件夹保存(基于python3.6)
from urllib.parse import urljoin import urllib.request from bs4 import BeautifulSoup import os impor ...
- Flutter实战视频-移动电商-09.首页_项目结构建立和获取数据
09.首页_项目结构建立和获取数据 在config下创建service_url.dart 用来配置我们后端接口的配置文件 一个变量存 接口地址,一个接口方法地址 所有后天请求数据的方法都放在这个文件夹 ...
- [iOS微博项目 - 2.6] - 获取微博数据
github: https://github.com/hellovoidworld/HVWWeibo A.新浪获取微博API 1.读取微博API 2.“statuses/home_time ...
- [转]WEB页获取串口数据
本文转自:https://www.cnblogs.com/rockyhm/p/3434200.html 最近做一个B/S的项目,需要读取电子秤的值,之前一直没做过,也没有经验,于是在网上找到很多 大 ...
随机推荐
- 爬虫基础 之 urllib
一.urllib 1. 访问 urllib.request.urlopen() 参数: url:需要爬取的URL地址 timeout:设置等待时间,指定时间内未得到相应时抛出异常 # 导入模块 imp ...
- XAML加载的四种方式
XAML加载与编译可以分为四种: 仅使用代码进行WPF程序的生成 使用代码和未编译的标记 使用代码和编译过的BAML 1.只是用代码进行窗体的生成:优点是可以随意定制应用程序,缺点是没有可视化编辑窗口 ...
- C# 网络连接中异常断线的处理:ReceiveTimeout, SendTimeout 及 KeepAliveValues(设置心跳)
C# 网络连接中异常断线的处理:ReceiveTimeout, SendTimeout 及 KeepAliveValues(设置心跳) 在使用 TcpClient 网络连接中常常会发生客户端连接异常断 ...
- Mybatis映射器接口代理对象的方式 运行过程
查询一张表的所有数据. 环境: 使用工具IntelliJ IDEA 2018.2版本. 创建Maven工程不用骨架 1.pom.xml <?xml version="1.0" ...
- Java虚拟机是怎么new的对象?
本文涉及:Java中的new命令之后发生的事 类加载检查 java虚拟机在遇到一条 new 指令时,首先会检查是否能在常量池中定位到这个类的符号引用,并且是否已被加载过.解析和初始化过.如果没有,那必 ...
- Elasticsearch 、 Logstash以及Kibana 分布式日志
搭建ELK日志分析平台(上)—— ELK介绍及搭建 Elasticsearch 分布式集群 ELK简介: ELK是三个开源软件的缩写,分别为:Elasticsearch . Logstash以及Kib ...
- 从 Vue 的视角学 React(三)—— 事件处理
如果要处理某个元素的 click 事件,原生 js 可以直接为该元素添加一个 onclick 函数 Vue 封装了 v-on 指令,可以简化为 @click 并添加相应的函数 React 的开发思想是 ...
- Kafka Streams开发入门(2)
背景 上一篇我们介绍了Kafka Streams中的消息转换操作map,今天我们给出另一个经典的转换操作filter的用法.依然是结合一个具体的实例展开介绍. 演示功能说明 本篇演示filter用法, ...
- 让window10目录支持大小写
今天用vmware影响文件夹以供linux系统使用,结果宿主机是win10系统,所以用在linux里,大小写变得不敏感. 解决办法也很简单. 管理员模式运行cmd(默认目录是C:\Windows\Sy ...
- postgresql源代码结构
转载学习: 德哥培训! 源码下载: https://www.postgresql.org/ftp/source/ 1.postgressql源码目录结构 2.src目录结构