cv2.solvepnp 相机的位姿估计

cv2.solvePnP(objectPoints, imagePoints, cameraMatrix, distCoeffs[, rvec[, tvec[, useExtrinsicGuess[, flags]]]]) → retval, rvec, tvec
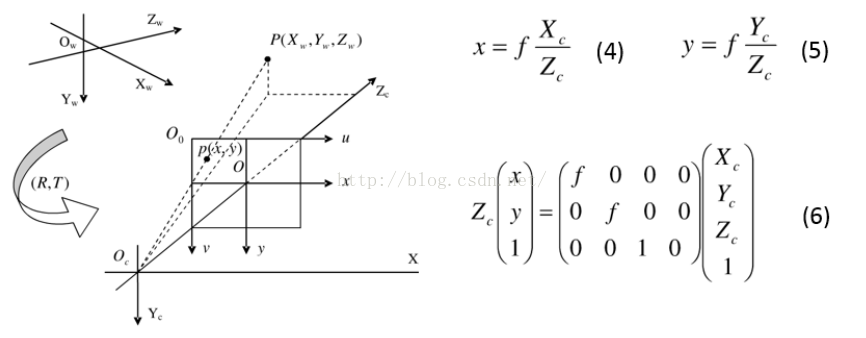
- objectPoints:世界坐标系中的3D点坐标,单位mm
- imagePoints:图像坐标系中点的坐标,单位像素
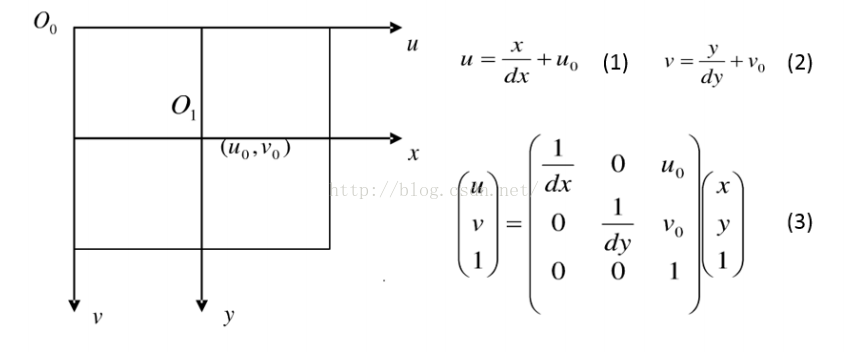
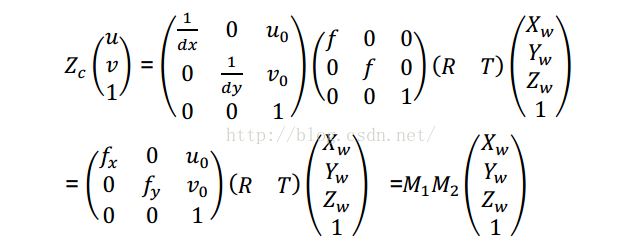
- cameraMatrix:相机内参矩阵
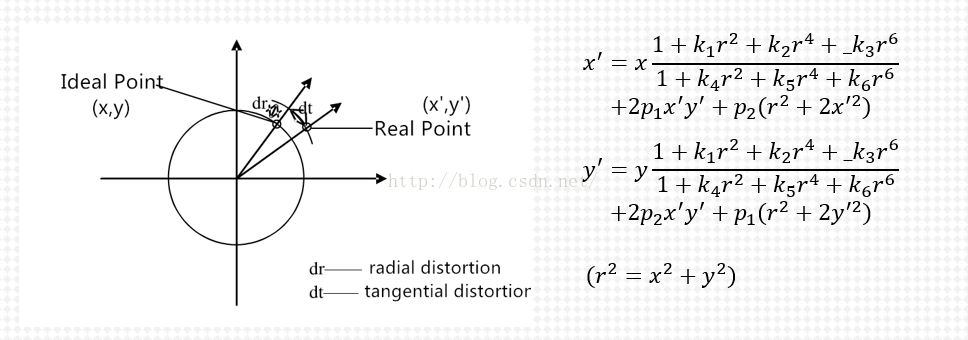
- distCoeffs:畸变系数
- rvec:旋转矩阵
- tvec:平移矩阵
- useExtrinsicGuess:是否输出平移矩阵和旋转矩阵,默认为false
- flags:SOLVEPNP _ITERATIVE、SOLVEPNP _P3P、SOLVEPNP _EPNP、SOLVEPNP _DLS、SOLVEPNP _UPNP
improt cv2 as cv import numpy as np objPoints = np.array([[],[],[]]) imgPoints = np.array([]) cameraMatrix = np.array() distCoeffs = np.array() retval,rvec,tvec = cv.solvePnP(objPoints,imgPoints,cameraMatrix,distCoeffs)
cv2.solvepnp 相机的位姿估计的更多相关文章
- python+opencv2相机位姿估计
最近在做基于图像的室内定位方面的研究,于是使用到了百度最新的室内数据库Image-based Localization (IBL) .由于该数据库给出的数据是每幅图像和其对应相机的内外参数和光心投影方 ...
- 相机位姿估计1_1:OpenCV:solvePnP二次封装与性能测试
关键词:OpenCV::solvePnP 文章类型:方法封装.测试 @Author:VShawn(singlex@foxmail.com) @Date:2016-11-27 @Lab: CvLab20 ...
- 相机位姿估计0:基本原理之如何解PNP问题
关键词:相机位姿估计 PNP问题求解 用途:各种位姿估计 文章类型:原理 @Author:VShawn(singlex@foxmail.com) @Date:2016-11-18 @Lab: CvLa ...
- 物体的三维识别与6D位姿估计:PPF系列论文介绍(三)
作者:仲夏夜之星 Date:2020-04-08 来源:物体的三维识别与6D位姿估计:PPF系列论文介绍(三) 文章“A Method for 6D Pose Estimation of Free-F ...
- 【转】【计算机视觉】opencv靶标相机姿态解算2 根据四个特征点估计相机姿态 及 实时位姿估计与三维重建相机姿态
https://blog.csdn.net/kyjl888/article/details/71305149
- 机器学习进阶-光流估计 1.cv2.goodFeaturesToTrack(找出光流估计所需要的角点) 2.cv2.calcOpticalFlowPyrLK(获得光流检测后的角点位置) 3.cv2.add(进行像素点的加和)
1.cv2.goodFeaturesToTrack(old_gray, mask=None, **feature_params) 用于获得光流估计所需要的角点参数说明:old_gray表示输入图片, ...
- 阅读高翔的RGBD-SLAM博文笔记
目录 高翔的RGBD-SLAM笔记 前端VO: 后端优化 高翔的RGBD-SLAM笔记 RGBD相机的特点: 使用RGBD相机中的深度这一维信息,以及相机的针孔成像模型,相机的内参,可以将二维点恢复成 ...
- ORB-SLAM2初步(跟踪模块)
一.跟踪模块简介 在ORB-SLAM或其他SLAM系统中,跟踪的主要任务是根据相机或视频输入的图像帧实时输出相机位姿.在ORB-SLAM中,跟踪模块的主要任务是实时输出相机位姿和筛选关键帧,完成一个没 ...
- CCF虚拟现实与可视化技术专委会丨面向增强现实的可视计算技术研究进展概述
https://mp.weixin.qq.com/s/I-rNwgXHEtwgdpkWzKtVXw 摘要 新一代增强现实技术需要依赖可视计算理论与方法解决大尺度复杂环境下的场景建模.内容生成.感知交互 ...
随机推荐
- linux多线程加解锁
1.动态方式使用互斥量,该类型的互斥量在定义时不进行初始化,需要在使用之前初始化,使用结束销毁 1.1.定义一个锁变量: pthread_mutex_t g_mutex_Msg; 1. ...
- [Lintcode]Word Squares(DFS|字符串)
题意 略 分析 0.如果直接暴力1000^5会TLE,因此考虑剪枝 1.如果当前需要插入第i个单词,其剪枝如下 1.1 其前缀(0~i-1)已经知道,必定在前缀对应的集合中找 – 第一个词填了ball ...
- Linux常用命令(补充)--其他
其他1)记录命令历史(1)!! (连续两个”!”),表示执行上一条指令:(2)!n(这里的n是数字),表示执行命令历史中第n条指令,例如”!100”表示执行命令历史中第100个命令:(3)!字符串(字 ...
- WC-第二次作业
WordCount 第二次作业 码云地址:https://gitee.com/lgcj1218/WordCount/tree/master 一.解题思路 本次作业采用的c#语言 按功能分为了三个类 , ...
- Python-15-收集参数
允许用户提供任意数量的参数: def print_params(*params): print(params) >>> print_params('Testing') ('Tes ...
- [题解](组合数学/gcd)luogu_P3166数三角形
首先转化为ans=所有的组合方式 - 在同一水平/竖直线上 - 在同一斜线上 主要考虑在同一斜线上的情况 首先想到枚举斜率然后在坐标系内平移,以(0,0)为起点,每条线上的点数应该是gcd(x,y)比 ...
- postman的安装和使用方法详解
文章来源:http://www.cnplugins.com/tool/specify-postman-methods.html 非官网安装 这是一种直接通过打包已经安装的扩展程序的方式,来进行我认为的 ...
- 解决git从remote clone后所有文件都改变的问题
遇到2次这种情况了,git从remote clone项目代码后发现所有文件都要改变,因为权限改变了,可以通过git来设置忽略权限变化 git config --global core.fileMode ...
- net core建站
带你快速进入.net core的世界 阅读目录 vmware虚拟机安装 CentOS7.3安装 Windows的客户端软件 .NET Core1.1安装 nginx1.12.1安装 配置防火墙 ...
- java类在eclipse上打jar包,Linux上成功运行的实例
1 eclipse下的java项目结构如下图所示: 2 打包的步骤如下: 3 修改minifest.mf文件: 4 .上传需要的三方jar包们和主类打的jar(案例是topV.jar)并且执行jav ...