stm32电机控制之控制两路直流电机!看完你会了吗
手头上有一个差分驱动的小车,使用两个直流电机驱动,要实现小车的在给定速度下运动,完成直线行驶,转向,加速,刹车等复杂运动。
使用的电机是12v供电的直流电机,带编码器反馈,这样就可以采用闭环速度控制,这里电机使用PWM驱动,速度控制框图如下:
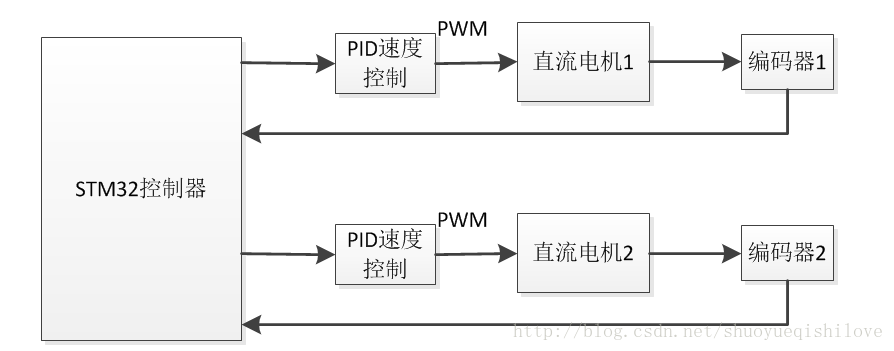
由以上框图可知,STM32通过定时器模块输出PWM波来控制两个直流电机的转动,通过改变PWM占空比的大小可以改变电机的转速,由于我们的控制目标是实现电机运行在速度范围内任意给定的速度,这里就需要采用闭环控制的思想,通过编码器获取电机的实时转速,通过与给定速度做差,将偏差作为PID控制器的输入,通过PID控制改变PWM占空比的大小,从而使电机的速度运行在给定的速度上。
这里使用的电机驱动芯片为TB6612,该芯片可以十分方便的驱动两个直流电机的运行,其驱动逻辑表如下:

AIN1,AIN2的不同组合可以实现电机的正反转和停车,PWMA为PWM的输入引脚,通过输入不同的占空比可以改变电机转速的快慢。BIN1,BIN2,PWMB是控制另一路电机的引脚。
首先我们需要利用STM32的定时器模块输出两路PWM波,这是使电机转起来的第一步。初始化PWM:
//初始化PWM引脚
void motorPWMPin_init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOE,ENABLE);
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_NOPULL;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9 | GPIO_Pin_11 ;//TIM1_Chn_1,TIM1_Chn_2
GPIO_Init(GPIOE,&GPIO_InitStructure);
GPIO_PinAFConfig(GPIOE,GPIO_PinSource9,GPIO_AF_TIM1);
GPIO_PinAFConfig(GPIOE,GPIO_PinSource11,GPIO_AF_TIM1);
}
//初始化PWM
void motorPWM_init(void)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStrecture;
TIM_OCInitTypeDef TIM_OCInitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_TIM1,ENABLE);
TIM_TimeBaseInitStrecture.TIM_Period = 400;/*PWM's frequency is 20KHz*/
TIM_TimeBaseInitStrecture.TIM_Prescaler =21-1;//将TIM1的时钟频率设定为8MHz
TIM_TimeBaseInitStrecture.TIM_ClockDivision = TIM_CKD_DIV1;
TIM_TimeBaseInitStrecture.TIM_CounterMode = TIM_CounterMode_Up;//定时器向上计数
TIM_TimeBaseInitStrecture.TIM_RepetitionCounter = 0;
TIM_TimeBaseInit(TIM1,&TIM_TimeBaseInitStrecture);
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High ;
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
TIM_OCInitStructure.TIM_OCIdleState = TIM_OCIdleState_Reset;
TIM_OC1Init(TIM1,&TIM_OCInitStructure);
TIM_OC2Init(TIM1,&TIM_OCInitStructure);
// TIM_Cmd(TIM1,ENABLE);
TIM_CtrlPWMOutputs(TIM1,ENABLE);
}
然后初始化电机控制引脚,程序如下:
//初始化电机控制引脚
void motorCtrlPin_init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOE,ENABLE);
//PE7,PE8控制电机A,PE9,PE10控制电机B
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_7|GPIO_Pin_8|GPIO_Pin_13|GPIO_Pin_14|GPIO_Pin_10;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_OUT;
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz;//100MHz
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_DOWN;
GPIO_Init(GPIOE, &GPIO_InitStructure);
}
需要注意的是设置PWM输出引脚时要讲引脚复用到定时器TIM1,而电机控制引脚只需要设置成简单的推挽输出模式即可。
接着我们需要使用两个定时器的编码器功能用于读取电机的实时转动速度,这里我使用的是定时器3和定时器4.
这里的编码器是精度较低的霍尔感应式编码器,但是基本满足控制精度的要求,驱动代码如下:
void encoderA_init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_ICInitTypeDef TIM_ICInitStructure;
/*CLOCK Enable*/
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE);
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOC, ENABLE); //PC6,PC7
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6 | GPIO_Pin_7;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;//复用引脚模式
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz; //100MHz
GPIO_InitStructure.GPIO_OType = GPIO_OType_OD;
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_NOPULL; //无上下拉
/*Configure PC6,PC7 as encoder A,B Input*/
GPIO_PinAFConfig(GPIOC,GPIO_PinSource6,GPIO_AF_TIM3);
GPIO_PinAFConfig(GPIOC,GPIO_PinSource7,GPIO_AF_TIM3);
GPIO_Init(GPIOC,&GPIO_InitStructure); //initialize PORTC
/* Timer configuration in Encoder mode */
/* Enable the TIM3 Update Interrupt */
NVIC_InitStructure.NVIC_IRQChannel = TIM3_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0x02;
NVIC_InitStructure.NVIC_IRQChannelSubPriority =0x01;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
TIM_TimeBaseStructInit(&TIM_TimeBaseStructure);
TIM_TimeBaseStructure.TIM_Prescaler = 0; //不分频
TIM_TimeBaseStructure.TIM_Period = 65535; //设置为最大
TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1;
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up ; //向上计数
TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure);
TIM_EncoderInterfaceConfig(TIM3, TIM_EncoderMode_TI12, TIM_ICPolarity_Rising , TIM_ICPolarity_Rising );//上升沿计数
TIM_ICStructInit(&TIM_ICInitStructure);
TIM_ICInitStructure.TIM_ICFilter = 10;//设置滤波系数
TIM_ICInit(TIM3, &TIM_ICInitStructure);
TIM_ClearFlag(TIM3, TIM_FLAG_Update); //清除更新中断
TIM_ITConfig(TIM3, TIM_IT_Update, ENABLE); //使能更新中断
TIM3->CNT = 0;//将计数值设为0
TIM_Cmd(TIM3, ENABLE);//enable TIM3
printf("Encoder_A initializztion is OK\n");
}
stm32视频资料
(stm32直流电机驱动)
http://www.makeru.com.cn/live/1392_1218.html?s=45051
(stm32 USART串口应用)
http://www.makeru.com.cn/live/1392_1164.html?s=45051
PWM脉宽调制技术
http://www.makeru.com.cn/live/4034_2146.html?s=45051
stm32电机控制之控制两路直流电机!看完你会了吗的更多相关文章
- stm32电机控制之控制两路直流电机
小车使用的电机是12v供电的直流电机,带编码器反馈,这样就可以采用闭环速度控制,这里电机使用PWM驱动,速度控制框图如下: 由以上框图可知,STM32通过定时器模块输出PWM波来控制两个直流电机的转动 ...
- STM32高级定时器TIM1产生两路互补的PWM波(带死区)
测试环境:Keil 5.20.0.0 STM32F103RBT6 固件库版本:STM32F10x_StdPeriph_Lib_V3.5.0(2011) 本文使用TIM1的通道1,通道2,产生两路1kh ...
- STM32驱动ILI9341控制器控制TFTLCD显示
STM32驱动ILI9341控制器控制TFTLCD显示 一.用STM32控制TFTLCD显示的编程方法,在编程驱动TFTLCD液晶显示器之前,我们先熟悉以下概念: 1.色彩深度,这是一个与TFTLCD ...
- FPGA图像处理 两路sensor的色调不一致
怎么调?可以让两路sensor的色调一致.
- STM32F207 两路ADC连续转换及GPIO模拟I2C给MT9V024初始化参数
1.为了更好的方便调试,串口必须要有的,主要打印一些信息,当前时钟.转换后的电压值和I2C读出的数据. 2.通过GPIO 模拟I2C对镁光的MT9V024进行参数初始化.之前用我以前公司SP0A19芯 ...
- 基于STM32F767两路互补SPWM波(HAL库)
SPWM波指的是占空比呈正弦规律变化的PWM波,生成方式是在定时器中断中调整PWM波的占空比. 对于互补的两路SPWM波,一路为低电平 ‘0’ 时,另一路为高电平 ‘1’,即两路是互补的. 对于STM ...
- nRF51822 的两路 PWM 极性
忙了一阵这个PWM,玩着玩着终于发现了些规律.Nordic 也挺会坑爹的. nRF51822 是没有硬件 PWM 的,只能靠一系列难以理解的 PPI /GPIOTE/TIMER来实现,其实我想说,我醉 ...
- 125-FMC125-两路125Msps AD,两路160Msps DA FMC子卡模块
FMC125-两路125Msps AD,两路160Msps DA FMC子卡模块 1.板卡概述 该板卡可实现2路14bit 250Msps AD 和2路16bit 160MspsDA功能,FMC连接 ...
- C#本质论第四版-1,抄书才能看下去,不然两三眼就看完了,一摞书都成了摆设。抄下了记忆更深刻
C#本质论第四版-1,抄书才能看下去,不然两三眼就看完了,一摞书都成了摆设.抄下了记忆更深刻 本书面向的读者 写作本书时,我面临的一个挑战是如何持续吸引高级开发人员眼球的同时,不因使用assembly ...
随机推荐
- 企业快速开发平台Spring Cloud+Spring Boot+Mybatis+ElementUI 实现前后端分离
鸿鹄云架构一系统管理平台 鸿鹄云架构[系统管理平台]使用J2EE技术来实施,是一个大型分布式的面向服务的JavaEE体系快速研发平台,基于模块化.服务化.原子化.热部署的设计思想,使用成熟领先的无商业 ...
- 'Specifying a namespace in include() without providing an app_name '报错解决
需要在每个ap下面的url.py 加入一个指定app的名字 比如 user app 下的 url.py 文件加入: urlpatterns = []app_name = "user& ...
- k8s标签label
1.给节点设置标签 一遍pod部署选择 kubectl label node 节点名 disktype=ssd kubectl label node master1 disktype=ssd 效果 [ ...
- Prometheus 2.21.0 新特性
Prometheus 2.21.0 现在(2020.09.11)已经发布,在上个月的 2.20.0 之后又进行了很多的修复和改进. 这个版本使用了 Go 1.15 进行编译,不赞成在TLS证书验证中使 ...
- cnblogs-theme-silence 主题设置简约风格
本文参考 更改博客皮肤 更改博客皮肤为Custom 页面定制CSS代码 勾选禁用模板默认CSS 导入复制该文件内容到代码框中 配置代码块复制功能 样式 和 右侧滑动条样式 /*复制功能添加按钮 beg ...
- 关于PHP数组Key的强制类型转换
PHP是弱类型语言,就像JavaScript一样,在定义变量时,不需要强制指定变量的类型.同时,PHP又有着强大的数组功能,数组的Key即可以是普通的数字类型下标,也可以是字符串类型的Hash键值,那 ...
- PHP垃圾回收机制的一些浅薄理解
相信只要入门学习过一点开发的同学都知道,不管任何编程语言,一个变量都会保存在内存中.其实,我们这些开发者就是在来回不停地操纵内存,相应地,我们如果一直增加新的变量,内存就会一直增加,如果没有一个好的机 ...
- symfony生成路由
控制器里生成地址 $this->generateUrl('course_manage_show_test', array('id' => 1)) twig前端文件生成地址: {{ path ...
- 一凡老师亲录视频,Python从零基础到高级进阶带你飞
如需Q群交流 群:893694563 不定时更新2-3节视频 零基础学生请点击 Python基础入门视频 如果你刚初入测试行业 如果你刚转入到测试行业 如果你想学习Python,学习自动化,搭建自动化 ...
- C++ 多线程按顺序执行函数
我们提供了一个类: public class Foo { public void first() { print("first"); } public void second() ...