Ubuntu 16.04 Roboware Turtlesim 测试
博客参考:https://www.jianshu.com/p/5509c8ba522b?utm_campaign
利用Turtlesim,编写简单的消息发布器和订阅器
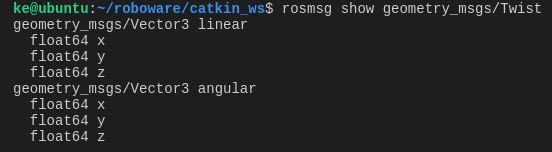
1. Twist消息,它的Topic是/cmd_vel,base controler订阅Twist消息来控制电机, 在终端中执行以下指令查看Twist消息的具体内容
rosmsg show geometry_msgs/Twist
 2. 编写一个控制turtlesim的发布器
2. 编写一个控制turtlesim的发布器
2.1 Roboware 创建turtlesim package, then add Src Folder including source file talker.cpp
#include <ros/ros.h>
#include <std_msgs/String.h>
#include <geometry_msgs/Twist.h> int main(int argc, char** argv)
{
ros::init(argc, argv,"talker");
ros::NodeHandle n; ros::Publisher pub = n.advertise<geometry_msgs::Twist>("/turtle1/cmd_vel", 1000);
ros::Rate loop_rate(10); while(ros::ok())
{
geometry_msgs::Twist msg; msg.linear.x = 1;
msg.angular.z = 1; pub.publish(msg);
ros::spinOnce();
loop_rate.sleep();
} return 0;
}
源代码内重要的部分
1. 定义一个publisher类的对象,其中advertise内的参数为(话题,发布的缓冲区大小)
ros::Publisher chatter_pub = n.advertise<geometry_msgs::Twist>("/turtle1/cmd_vel", 1000);
2 geometry_msgs::Twist msg
//定义一个twist类消息对象
msg.linear.x = 1; // 设置线速度为1m/s,正为前进,负为后退
msg.angular.z = 1; // 设置角速度为1rad/s,正为左转,负为右转
3 pub.publish(msg)
通过刚才创建的publisher对象发布刚才创建的twist类对象, 这样执行完上面的代码,我们就可以将复制好linear和angular参数的twist对象广播出去,广播的topic是/turtle1/cmd_vel,也就是turtlesim会自动订阅的topic.
运行
1. 运行roscore
2. 运行turtlesim仿真器
rosrun turtlesim turtlesim_node
3. 运行编译的消息发布结点
source devel/setup.bash
rosrun turrlesim talker
测试效果如下
Ubuntu 16.04 Roboware Turtlesim 测试的更多相关文章
- Ubuntu 16.04 Roboware安装和使用
博客参考:https://blog.csdn.net/qq_41450811/article/details/80305846 RoboWare Studio是一个ROS集成开发环境.它使 ROS开发 ...
- Ubuntu 16.04安装JMeter测试工具
JMeter是Java的测试工具,由Apache开发. 同样,JMeter是跨平台的. 下载: http://jmeter.apache.org/download_jmeter.cgi 安装: 7z ...
- Ubuntu 16.04 安装PCL库以及测试
参考链接:https://blog.csdn.net/dantengc/article/details/78446600 参考博客,官网一直安装不成功,后来参照一篇博客终于安装成功了,记录如下. 1. ...
- Ubuntu 16.04安装测试MQTT Mosquitto
环境:Ubuntu 16.04 介绍MQTT MQTT是一种机器到机器的消息传递协议,旨在为“物联网”设备提供轻量级的发布/订阅通信.它通常用于地理跟踪车队,家庭自动化,环境传感器网络和公用事业规模数 ...
- Ubuntu 16.04上安装SkyEye及测试
说明一下,在Ubuntu 16.04上安装SkyEye方法不是原创,是来自互联网,仅供学习参考. 一.检查支持软件包 gcc,make,vim(optional),ssh,subversionbinu ...
- Ubuntu 16.04 LAMP server 指南 - 配置 Apache2.4,PHP7,和MariaDB(而不是MySQL)
翻译自:https://www.howtoforge.com/tutorial/install-apache-with-php-and-mysql-on-ubuntu-16-04-lamp/ 昨天在虚 ...
- ubuntu 16.04安装docker
环境 操作系统:ubuntu 16.04 64位,默认安装 准备 1. 添加GPG key: $ sudo apt-key adv --keyserver hkp://p80.pool.sks-key ...
- Ubuntu 16.04 LTS 安装 Nginx/PHP 5.6/MySQL 5.7 (LNMP) 与Laravel
Ubuntu 16.04 LTS 安装 Nginx/PHP 5.6/MySQL 5.7 (LNMP) 与Laravel 1.MySQL安装[安装 MariaDB]MariaDB是MySQL的一个分支首 ...
- tips of my ubuntu 16.04 LTS
update_0 : sudo .../idea.sh 才会把idea安装上,不加sudo也会启动,但是不会在开始菜单中找到程序. ---------------------------------- ...
随机推荐
- springboot 打包太大,打包瘦身,打包thin
pom文件修改: <build> <resources> <resource> <directory>src/main/resources</di ...
- 微信小程序引入外部组件 iView Weapp
iview Weapp组件的使用方法: 1. 下载小程序组件库 (前提是你已经有了项目目录) 你可以直接去github把iView Weapp的代码下载下来,也可以用过npm来下载. github地址 ...
- zookeeper,及k8s基础概念
1.描述zookeeper集群中leader,follower,observer几种角色 Zookeeper: 分布式系统:是一个硬件或软件组件分布在网络中的不同的计算机之上,彼此间仅通过消息传递进行 ...
- Vue开发之基础路由
1.router-link和router-view组件 src/App.vie文件内容: <template> <div id="app"> <div ...
- OpenCV录制视频,播放视频
一.录制视频 获取摄像头操作 camObj = cv2.VideoCapture(0) :0为默认计算机默认摄像头,多个摄像头依次后面1.2.3 检查是否成功初始化: camObj.isOpen() ...
- pkusc2019游记
Day0 早上 6:55 的高铁,6 点就起了,好困呜呜呜 去的路上跟 memset0 坐一起,突然发现雀魂还没停服,先雀了一局(居然拿了个 1 位还飞了一个人),与此同时 memset0 切了一道毒 ...
- cf1158A-The Party and Sweets - (贪心+思维)
题意:有n个男孩,m个女孩,每个男孩给每个女孩一堆糖果.b数组表示每个男孩给出的最少糖果数,g数组表示每个女孩子收到的最大糖果数.求所有男孩给出的最小糖果总数. 解题: 先对b数组和g数组从小到大排序 ...
- @EnableFeignClients 客户端详细
在Spring cloud应用中,当我们要使用feign客户端时,一般要做以下三件事情 : 1.使用注解@EnableFeignClients启用feign客户端: 示例 : @SpringBootA ...
- call JSON.parse JSON.stringify typeof 的使用及严格模式this的使用
<!DOCTYPE html> <html> <head> <meta charset="utf-8"> <title> ...
- 小胖守皇宫(VIJOS P1144 )题解
题目描述 huyichen世子事件后,xuzhenyi成了皇上特聘的御前一品侍卫. 皇宫以午门为起点,直到后宫嫔妃们的寝宫,呈一棵树的形状:某些宫殿间可以互相望见.大内保卫森严,三步一岗,五步一哨,每 ...