How to publish a pointcloud of ros msgs in a topic from a pcd file?
How to publish a pointcloud of ros msgs in a topic from a pcd file?
Two methods
1. modified source
2. pcd_to_pointcloud
- run ros node pcl_ros in a terminal
usage:
$ rosrun pcl_ros pcd_to_pointcloud <file.pcd> [ <interval> ]
Loads a PCD file, publishing it one or more times as a ROS point cloud message.
Published Topics
- cloud_pcd (sensor_msgs/PointCloud2)
// A stream of point clouds generated from the PCD file.
// <interval> is the (optional) number of seconds to sleep between messages.
// If <interval> is zero or not specified the message is published once.
- in my condition, I use
// can add _frame_id:=/camera_link
$ rosrun pcl_ros pcd_to_pointcloud /home/william/Documents/demos/cylinders/preprocessing/data/realSense02.pcd 10 _frame_id:=/map
- run rviz:
$ rosrun rviz rviz
If the frame id you add is not camera_link, then should be edit.
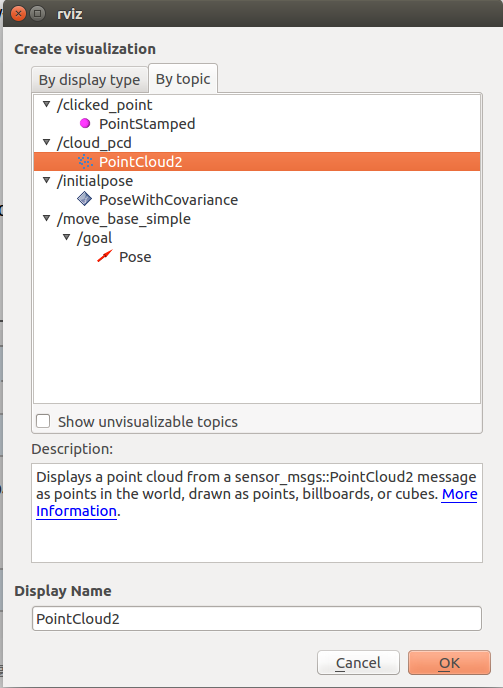
click 'Add', click 'By topic', choose 'Pointcloud2' below topic '/cloud_pcd'. Then the pointcloud can be visualized.
References:
How to publish a pointcloud of ros msgs in a topic from a pcd file?的更多相关文章
- ROS(一)Topic 通信
ROS系统起源于2007年斯坦福大学人工智能实验室的项目与机器人技术公司Willow Garage的个人机器人项目(Personal Robots Program)之间的合作,2008年之后就由Wil ...
- ros 使用命令测试topic
发布话题 $ rostopic pub -r /chatter std_msgs/String "test" 输出数据: $ rostopic echo /chatter data ...
- python smbus IOError: [Errno 2] No such file or directory
1.打开配置文件 sudo nano /boot/config.txt 打开以下选项 "dtparam=i2c_arm=on" ctrl + o 保存 ctrl + x 退出 2. ...
- 如何在ROS中使用PCL(2)
记录关于我们运行roslaunch openni_launch openni.launch 命令时生成的话题以及这些话题的数据类型便于后期的处理,只有知道它们的数据结构,才能很好的对数据进行处理,我 ...
- ROS教程
Learning ROS 学习ROS Depending on your learning style and preferences, you can take two approaches to ...
- ROS语音交互(四)接入图灵语义理解
首先程序中会用到Json,curl 安装相应的库 $ sudo apt-get install libcurl3 libcurl4-openssl-dev$ sudo apt-get install ...
- ROS多个master消息互通
需求 有时候我们需要有几个不同的master, 他们之间要交换topic的内容,这时候就不能使用ros自带的设置同一个master的方法. 我们的处理方法是,构造一个client和一个server,他 ...
- 理解ROS话题
首先需要打开一个终端在里面运行roscore: roscore 再打开一个终端,在里面运行一个turtlesim_node节点: rosrun turtlesim turtlesim_node 打开另 ...
- (二)ROS系统架构及概念 ROS Architecture and Concepts 以Kinetic为主更新 附课件PPT
第2章 ROS系统架构及概念 ROS Architecture and Concepts PPT说明: 正文用白色,命令或代码用黄色,右下角为对应中文译著页码. 这一章需要掌握ROS文件系统,运行图级 ...
随机推荐
- Make 命令
Linux 下 make 命令是系统管理员和程序员用的最频繁的命令之一.管理员用它通过命令行来编译和安装很多开源的工具,程序员用它来管理他们大型复杂的项目编译问题.本文我们将用一些实例来讨论 make ...
- Android 4学习(6):概述 - 深入了解Android Activity
参考:<Professional Android 4 Application Development> 深入了解Android Activity 每一个Android Activity都对 ...
- CSS——常用
1.超链接样式 a:link {color: #FF0000} /* 未访问的链接 */a:visited {color: #00FF00} /* 已访问的链接 */a:hover {color: ...
- SQL 实现行列互换
Oracle:不过大多数是采用 oracle 数据库当中的一些便捷函数进行处理,比如 ”pivot”: MySql:目前没有找到更好的方法 题目:数据库中有一张如下所示的表,表名为sales. 年 季 ...
- 异常 android.content.res.Resources$NotFoundException: String resource ID #0x61
09-09 16:08:41.554: E/Weaver(13140):09-09 16:08:41.554: E/Weaver(13140): android.content.res.Resourc ...
- Condition实现多个生产者多个消费者
Condition实现多对多交替打印: import java.util.concurrent.locks.Condition; import java.util.concurrent.locks.R ...
- ZROI2018提高day3t2
传送门 分析 我们设A[i]表示点i有几个矿,B[i]表示这之中有几个矿是第一次出现,所以点i的贡献即为 (2^B[i]-1)*(2^(A[i]-B[i])) 注意减一的原因是第一次出现的矿应至少有一 ...
- ZROI2018提高day1t2
传送门 分析 考场上看错了第一个条件,于是觉得是个简单贪心,随便取了每一个点的最大收益然后算了一下,就得了40pts...看来读对题很重要呀qwq.实际的正解是这样的:我们将每一个i与f[i]连一条边 ...
- $this->autoRender = false
动作执行完之后禁止调用render()方法
- SDUT 3398 数据结构实验之排序一:一趟快排
数据结构实验之排序一:一趟快排 Time Limit: 1000MS Memory Limit: 65536KB Submit Statistic Problem Description 给定N个长整 ...