ubuntu开机自启动服务管理
安装sysv-rc-conf
sudo apt-get install sysv-rc-conf
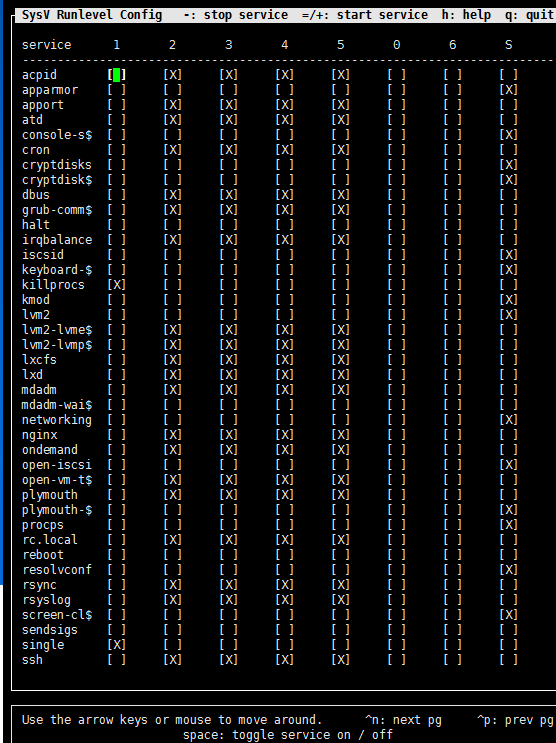
执行下面,查看服务情况
sudo sysv-rc-conf
启动服务有以下两种方式
update-rc.d service_name defaults;
sysv-rc-conf --level 345 service_name on;
查看某个服务启动级别
sysv-rc-conf --list server_name
如:
sysv-rc-conf --list nginx
ubuntu开机自启动服务管理的更多相关文章
- ubuntu开机自启动服务
ubuntu下一个用来管理开机自启动服务的程序,今天在ss vps上安装时老是提示这个错误,百度后,下面的这个方法可行: vi /etc/apt/source.list 输入i,进入Insert模式 ...
- 【centos7】设置开机自启动服务--systemd
centos7使用systemd管理开机自启动服务,不提倡rc.local. 假设现在有2个服务,分别为: my111: my222: 希望在开机时自动启动my222服务,但是my222启动需要my1 ...
- NO19 优化Linux系统--重要开机自启动服务--关闭自启动项
**如何优化Linux系统: 1 不用root,添加普通用户,通过sudo授权管理.2 更改默认的远程连接SSH服务端口及禁止root用户远程连接.3 定时自动更新服务器时间.4 配置 ...
- linux开机自启动服务优化设置命令
1.设置成英文字符,避免出现乱码[root@xuegod62 ~]# LANG=en2.两种配置linux开机自启动服务命令:1)[root@xuegod62 ~]# ntsysv2)[root@xu ...
- Ubuntu 开机自启动SSH+远程关机
Ubuntu 开机自启动SSH+远程关机 安装SSH 如何通过ssh远程登录linux系统 开机自启动ssh sudo gedit /etc/rc.locl # 输入密码 # 添加下面命令于 ex ...
- Centos 下添加开机自启动服务和脚本【转】
最近刚玩Centos7的系统,跟Centos6还是很多方面有改变的,这里记录一下怎么在Centos7下添加开机自启动脚本和服务的方法. 1.添加开机自启服务 我这里以docker 服务为例,设置如下两 ...
- 第十六章节 BJROBOT 开机自启动服务【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端运行rosrun robot_upstart install znjrobot/launch/bringup.launch 2 ...
- Ubuntu 开机自启动工具 update-rd.d 使用详解
常用命令: $ sudo update-rc.d nginx defaults #增加服务 $ sudo update-rc.d -f nginx remove #移除服务 Linux ...
- Centos7 环境下开机 自启动服务(service) 设置的改变 (命令systemctl 和 chkconfig用法区别比较)
参考文章: <Linux 设置程序开机自启动 (命令systemctl 和 chkconfig用法区别比较)> http://blog.csdn.net/kenhins/article/ ...
随机推荐
- Oracle——基础知识(一)
一.Oracle中的数据类型 1.字符串类型.如:char.nchar.varchar2.nvarchar2.2.数值类型.如:int.number(p,s).integer.smallint. ...
- [Python Study Notes]饼状图绘制
''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''''' ...
- plupload的一些使用心得
最近要做一个文件上传的东西 经过同事的推荐所以就选择了plupload,挺强大的 由于项目框架为改动后的MVC 刚一开始破费周折 不过最后总算是完成了 废话不多说了 粘出来代码给大家参考吧!文件包大家 ...
- Python 面向对象 (进阶篇)
<Python 面向对象(初级篇)>文章介绍了面向对象基本知识: 面向对象是一种编程方式,此编程方式的实现是基于对 类 和 对象 的使用 类 是一个模板,模板中包装了多个“函数”供使用(可 ...
- 使用网络用户命令行工具的/passwordreq:yes
提示:"新建域时,本地administrator帐户将成为域administrator账户.无法新建域,因为本地administrator账户密码不符合要求.目前,本地administrat ...
- [xdoj1007]易碎的鸟蛋(dp)
解题思路:f[n,m]表示n层楼.m个鸡蛋时所需要的最小次数,则 转移方程为:f[n,m] = min{ 1+max(f[i-1,m-1], f[n-i,m]) | i=1..n }初始条件:f[i, ...
- 业务逻辑:五、完成认证用户的动态授权功能 六、完成Shiro整合Ehcache缓存权限数据
一. 完成认证用户的动态授权功能 提示:根据当前认证用户查询数据库,获取其对应的权限,为其授权 操作步骤: 在realm的授权方法中通过使用principals对象获取到当前登录用户 创建一个授权信息 ...
- Windows系统 安装 Qt 5.7.0
Windows系统 安装 Qt 5.7.0 我们的电脑系统:Windows 10 64位 Qt5 软件:Qt 5. 7. 0 下载 Qt 5.7.0 软件 在这个网站里面,下载:Qt 5.7.0 fo ...
- Luogu 1081 [NOIP2012] 开车旅行
感谢$LOJ$的数据让我调掉此题. 这道题的难点真的是预处理啊…… 首先我们预处理出小$A$和小$B$在每一个城市的时候会走向哪一个城市$ga_i$和$gb_i$,我们有链表和平衡树可以解决这个问题( ...
- jquery 仿文本编辑器(智能提示输入文字)
1.前台代码 <%@ Page Language="C#" AutoEventWireup="true" CodeBehind="InputAu ...