『TensorFlow』SSD源码学习_其七:损失函数
Fork版本项目地址:SSD
一、损失函数介绍
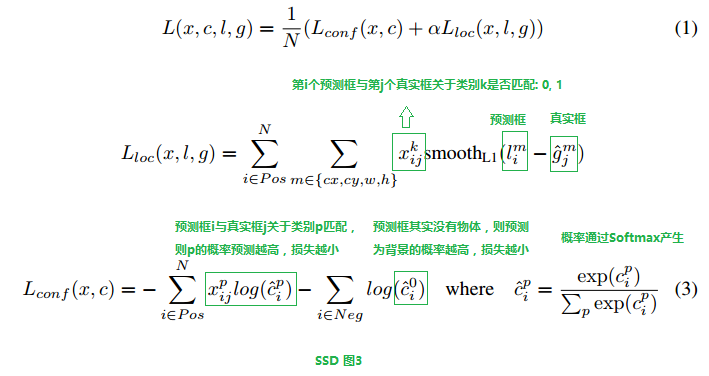
SSD损失函数分为两个部分:对应搜索框的位置loss(loc)和类别置信度loss(conf)。(搜索框指网络生成的网格)
详细的说明如下:
i指代搜索框序号,j指代真实框序号,p指代类别序号,p=0表示背景,
中取1表示此时第i个搜索框和第j个类别框IOU大于阈值,此时真实框中对象类别为p。
cip表示第i个搜索框对应类别p的预测概率。
二、分类损失函数
有了上图的分析,我们可以看具体实现了,首先我们看Lconf部分的计算,其分为最大化第一个累加符号和最大化第二个累加符号两个部分(这牵扯到另一个问题:Pos框和Neg框的选择,这一点我们在下面分析代码中会也提及,注意两者都是对搜索框进行的讨论),我们将分别讨论两部分的实现逻辑,根据代码来看,首先确定正样本框的掩码:
dtype = logits.dtype
pmask = gscores > match_threshold # (全部搜索框数目, 21),类别搜索框和真实框IOU大于阈值
fpmask = tf.cast(pmask, dtype) # 浮点型前景掩码(前景假定为含有对象的IOU足够的搜索框标号)
n_positives = tf.reduce_sum(fpmask) # 前景总数
也就是说只要IOU到达阈值就认为这个搜索框是正样本(fpmask标记),注意,即使是第0类也可以(不过一般来说是不会有真实框框住背景并进行标注的), 然后看负样本,
no_classes = tf.cast(pmask, tf.int32)
predictions = slim.softmax(logits) # 此时每一行的21个数转化为概率
nmask = tf.logical_and(tf.logical_not(pmask),
gscores > -0.5) # IOU达不到阈值的类别搜索框位置记1
fnmask = tf.cast(nmask, dtype)
nvalues = tf.where(nmask,
predictions[:, 0], # 框内无物体标记为背景预测概率
1. - fnmask) # 框内有物体位置标记为1
nvalues_flat = tf.reshape(nvalues, [-1])
此时的负样本(fnmask标记)同样的为{0,1},且和正样本互补,但是这样会导致负样本过多,所以建立nvalue用于筛选负样本,nvalue中fnmask为1的位置记为对应搜索框的第0类(背景)预测概率,否则记为1(fpmask标记位置),
# 在nmask中剔除n_neg个最不可能背景点(对应的class0概率最低)
max_neg_entries = tf.cast(tf.reduce_sum(fnmask), tf.int32)
# 3 × 前景掩码数量 + batch_size
n_neg = tf.cast(negative_ratio * n_positives, tf.int32) + batch_size
n_neg = tf.minimum(n_neg, max_neg_entries)
val, idxes = tf.nn.top_k(-nvalues_flat, k=n_neg) # 最不可能为背景的n_neg个点
max_hard_pred = -val[-1]
# Final negative mask.
nmask = tf.logical_and(nmask, nvalues < max_hard_pred) # 不是前景,又最不像背景的n_neg个点
fnmask = tf.cast(nmask, dtype)
在进一步处理中,我们希望负样本不要超过正样本数目的3倍,确保能够收敛(具体推导不明),由于知道这些负样本都属于背景(和真实框IOU不足),所以理论上其class 0预测值越大越好,我们取class 0预测值最小的3倍正样本数目的负样本,最大化其class 0预测值,达到最小化损失函数的目的。筛选后的负样本(fnmask标记)为原负样本中class 0预测值最小的目标数目的点。
# Add cross-entropy loss.
with tf.name_scope('cross_entropy_pos'):
loss = tf.nn.sparse_softmax_cross_entropy_with_logits(logits=logits,
labels=gclasses) # 0-20
loss = tf.div(tf.reduce_sum(loss * fpmask), batch_size, name='value')
tf.losses.add_loss(loss) with tf.name_scope('cross_entropy_neg'):
loss = tf.nn.sparse_softmax_cross_entropy_with_logits(logits=logits,
labels=no_classes) # {0,1}
loss = tf.div(tf.reduce_sum(loss * fnmask), batch_size, name='value')
tf.losses.add_loss(loss)
对应两部分的损失函数计算。上面的公式中第一部分比第二部分多了个x,实际上是为了确定cp中p的取值,而第二部分不需要了,因为p恒为0。
no_classes为标签,只要保证fnmask中标记点(负样本)对应位置为0即可。对应的gclasses其实只要pnmask为1位置有真实分类标签即可,之所以额外划分出no_classes是因为gclasses在迭代生成时有可能给得分(IOU)不足够高的搜索框标注上类别信息,而在本函数一开始,我们就使用得分(IOU)对搜索框进行了二次筛选(在gclasses、gscores、glocalisations生成过程中会对IOU进行一次筛选),fpmask可能会将一些一次筛选中标记了gclasses(且不为0)的搜索框剔除,这对正样本没有影响(正样本位置一定是gclasses标记位置的子集),但是会影响负样本(新的认定为背景的搜索框在gclasses上有标记类别,同时也是说其gscore分数不够二次筛选的标准),所以需要为负样本标注新的类别标签。
三、定位损失函数
定位损失函数形式简单一点,
# Add localization loss: smooth L1, L2, ...
with tf.name_scope('localization'):
# Weights Tensor: positive mask + random negative.
weights = tf.expand_dims(alpha * fpmask, axis=-1)
loss = custom_layers.abs_smooth(localisations - glocalisations)
loss = tf.div(tf.reduce_sum(loss * weights), batch_size, name='value')
tf.losses.add_loss(loss)
调用函数如下:
def abs_smooth(x):
"""Smoothed absolute function. Useful to compute an L1 smooth error. Define as:
x^2 / 2 if abs(x) < 1
abs(x) - 0.5 if abs(x) > 1
We use here a differentiable definition using min(x) and abs(x). Clearly
not optimal, but good enough for our purpose!
"""
absx = tf.abs(x)
minx = tf.minimum(absx, 1)
r = 0.5 * ((absx - 1) * minx + absx)
return r
四、损失函数全览
def ssd_losses(logits, localisations, # 预测类别,位置
gclasses, glocalisations, gscores, # ground truth类别,位置,得分
match_threshold=0.5,
negative_ratio=3.,
alpha=1.,
label_smoothing=0.,
device='/cpu:0',
scope=None): with tf.name_scope(scope, 'ssd_losses'): # 提取类别数和batch_size
lshape = tfe.get_shape(logits[0], 5) # tensor_shape函数可以取代
num_classes = lshape[-1]
batch_size = lshape[0] # Flatten out all vectors!
flogits = []
fgclasses = []
fgscores = []
flocalisations = []
fglocalisations = []
for i in range(len(logits)): # 按照ssd特征层循环
flogits.append(tf.reshape(logits[i], [-1, num_classes]))
fgclasses.append(tf.reshape(gclasses[i], [-1]))
fgscores.append(tf.reshape(gscores[i], [-1]))
flocalisations.append(tf.reshape(localisations[i], [-1, 4]))
fglocalisations.append(tf.reshape(glocalisations[i], [-1, 4]))
# And concat the crap!
logits = tf.concat(flogits, axis=0) # 全部的搜索框,对应的21类别的输出
gclasses = tf.concat(fgclasses, axis=0) # 全部的搜索框,真实的类别数字
gscores = tf.concat(fgscores, axis=0) # 全部的搜索框,和真实框的IOU
localisations = tf.concat(flocalisations, axis=0)
glocalisations = tf.concat(fglocalisations, axis=0) """[<tf.Tensor 'ssd_losses/concat:0' shape=(279424, 21) dtype=float32>,
<tf.Tensor 'ssd_losses/concat_1:0' shape=(279424,) dtype=int64>,
<tf.Tensor 'ssd_losses/concat_2:0' shape=(279424,) dtype=float32>,
<tf.Tensor 'ssd_losses/concat_3:0' shape=(279424, 4) dtype=float32>,
<tf.Tensor 'ssd_losses/concat_4:0' shape=(279424, 4) dtype=float32>]
""" dtype = logits.dtype
pmask = gscores > match_threshold # (全部搜索框数目, 21),类别搜索框和真实框IOU大于阈值
fpmask = tf.cast(pmask, dtype) # 浮点型前景掩码(前景假定为含有对象的IOU足够的搜索框标号)
n_positives = tf.reduce_sum(fpmask) # 前景总数 # Hard negative mining...
no_classes = tf.cast(pmask, tf.int32)
predictions = slim.softmax(logits) # 此时每一行的21个数转化为概率
nmask = tf.logical_and(tf.logical_not(pmask),
gscores > -0.5) # IOU达不到阈值的类别搜索框位置记1
fnmask = tf.cast(nmask, dtype)
nvalues = tf.where(nmask,
predictions[:, 0], # 框内无物体标记为背景预测概率
1. - fnmask) # 框内有物体位置标记为1
nvalues_flat = tf.reshape(nvalues, [-1]) # Number of negative entries to select.
# 在nmask中剔除n_neg个最不可能背景点(对应的class0概率最低)
max_neg_entries = tf.cast(tf.reduce_sum(fnmask), tf.int32)
# 3 × 前景掩码数量 + batch_size
n_neg = tf.cast(negative_ratio * n_positives, tf.int32) + batch_size
n_neg = tf.minimum(n_neg, max_neg_entries)
val, idxes = tf.nn.top_k(-nvalues_flat, k=n_neg) # 最不可能为背景的n_neg个点
max_hard_pred = -val[-1]
# Final negative mask.
nmask = tf.logical_and(nmask, nvalues < max_hard_pred) # 不是前景,又最不像背景的n_neg个点
fnmask = tf.cast(nmask, dtype) # Add cross-entropy loss.
with tf.name_scope('cross_entropy_pos'):
loss = tf.nn.sparse_softmax_cross_entropy_with_logits(logits=logits,
labels=gclasses) # 0-20
loss = tf.div(tf.reduce_sum(loss * fpmask), batch_size, name='value')
tf.losses.add_loss(loss) with tf.name_scope('cross_entropy_neg'):
loss = tf.nn.sparse_softmax_cross_entropy_with_logits(logits=logits,
labels=no_classes) # {0,1}
loss = tf.div(tf.reduce_sum(loss * fnmask), batch_size, name='value')
tf.losses.add_loss(loss) # Add localization loss: smooth L1, L2, ...
with tf.name_scope('localization'):
# Weights Tensor: positive mask + random negative.
weights = tf.expand_dims(alpha * fpmask, axis=-1)
loss = custom_layers.abs_smooth(localisations - glocalisations)
loss = tf.div(tf.reduce_sum(loss * weights), batch_size, name='value')
tf.losses.add_loss(loss)
『TensorFlow』SSD源码学习_其七:损失函数的更多相关文章
- 『TensorFlow』SSD源码学习_其一:论文及开源项目文档介绍
一.论文介绍 读论文系列:Object Detection ECCV2016 SSD 一句话概括:SSD就是关于类别的多尺度RPN网络 基本思路: 基础网络后接多层feature map 多层feat ...
- 『TensorFlow』SSD源码学习_其五:TFR数据读取&数据预处理
Fork版本项目地址:SSD 一.TFR数据读取 创建slim.dataset.Dataset对象 在train_ssd_network.py获取数据操作如下,首先需要slim.dataset.Dat ...
- 『TensorFlow』SSD源码学习_其四:数据介绍及TFR文件生成
Fork版本项目地址:SSD 一.数据格式介绍 数据文件夹命名为VOC2012,内部有5个子文件夹,如下, 我们的检测任务中使用JPEGImages文件夹和Annotations文件夹. JPEGIm ...
- 『TensorFlow』SSD源码学习_其二:基于VGG的SSD网络前向架构
Fork版本项目地址:SSD 参考自集智专栏 一.SSD基础 在分类器基础之上想要识别物体,实质就是 用分类器扫描整张图像,定位特征位置 .这里的关键就是用什么算法扫描,比如可以将图片分成若干网格,用 ...
- 『TensorFlow』SSD源码学习_其八:网络训练
Fork版本项目地址:SSD 作者使用了分布式训练的写法,这使得训练部分代码异常臃肿,我给出了部分注释.我对于多机分布式并不很熟,而且不是重点,所以不过多介绍,简单的给出一点训练中作者的优化手段,包含 ...
- 『TensorFlow』SSD源码学习_其六:标签整理
Fork版本项目地址:SSD 一.输入标签生成 在数据预处理之后,图片.类别.真实框格式较为原始,不能够直接作为损失函数的输入标签(ssd向前网络只需要图像就行,这里的处理主要需要满足loss的计算) ...
- 『TensorFlow』SSD源码学习_其三:锚框生成
Fork版本项目地址:SSD 上一节中我们定义了vgg_300的网络结构,实际使用中还需要匹配SSD另一关键组件:被选取特征层的搜索网格.在项目中,vgg_300网络和网格生成都被统一进一个class ...
- nginx源码学习_源码结构
nginx的优秀除了体现在程序结构以及代码风格上,nginx的源码组织也同样简洁明了,目录结构层次结构清晰,值得我们去学习.nginx的源码目录与nginx的模块化以及功能的划分是紧密结合,这也使得我 ...
- 『TensorFlow』读书笔记_TFRecord学习
一.程序介绍 1.包导入 # Author : Hellcat # Time : 17-12-29 import os import numpy as np np.set_printoptions(t ...
随机推荐
- c++stack容器介绍
c++stack(堆栈)是一个容器的改编,它实现了一个先进后出的数据结构(FILO) 使用该容器时需要包含#include<stack>头文件: 定义stack对象的示例代码如下: sta ...
- ffmpeg的编译和安装
1. 先到ffmpeg官网上下载ffmpeg源码,然后配置.编译 http://ffmpeg.org/download.html 可以如下进行配置: ./configure --prefix=/usr ...
- 面试题----入参两个Integer,无返回值,然后使这个两个值在调用函数后交换
我最近看到过一个比较好玩的面试题. 写个方法,入参两个Integer,无返回值,然后使这个两个值在调用函数后交换 很有意思的一个题目,引发我的深思,根据一路的学习过来,下面把实现代码贴出来,方便学习. ...
- JVM(一):方法区
方法区(Method Area) 在JVM中,类型信息和类静态变量都保存在方法区中,需要注意的一点是,常量池也存放于方法区中. 类型信息包括: 1.类型的全名(The fully qualified ...
- python练习题-day15
1.请利用filter()过滤出1~100中平方根是整数的数,即结果应该是: [1, 4, 9, 16, 25, 36, 49, 64, 81, 100] 2.列表按照其中每一个值的绝对值排序 li ...
- Java学习之路-Hessian学习
Hessian是基于HTTP的轻量级远程服务解决方案,Hessian像Rmi一样,使用二进制消息进行客户端和服务器端交互.但与其他二进制远程调用技术(例如Rmi)不同的是,它的二进制消息可以移植其他非 ...
- python 当前时间多加一天、一小时、一分钟
datetime模块 import datetime # 获取当前时间 print(datetime.datetime.now()) # 2017-07-15 15:01:24.619000 # 格式 ...
- java之Spring集成CXF简单调用
简介 Apache CXF = Celtix + XFire,开始叫 Apache CeltiXfire,后来更名为 Apache CXF 了,以下简称为 CXF.CXF 继承了 Celtix 和 X ...
- Fluxion无线攻击
使用步骤 github地址 https://github.com/deltaxflux/fluxion 进入到fluxion目录下 ./fluxion 启动fluxion 启动之后会先检测没有安装的 ...
- codeforces 985A Chess Placing
题意: 移动最少的步数,使得所有的棋子在同一颜色的格子中. 每次一个棋子只能向左或者向右移动一步,不能移到有棋子的格子中. 思路: 枚举全黑和全白的情况. 对于每一个需要移动的棋子,它移动到的位置一定 ...