MAVLINK协议
参考https://cloud.tencent.com/developer/news/48344
https://www.cnblogs.com/lovechen/p/5801679.html
https://www.cnblogs.com/lovechen/p/5809709.htm
https://www.jianshu.com/p/e57aa664103f
https://www.e-learn.cn/content/qita/1017591
是一种用于飞行器上的轻量级成熟通信协议,与很多自定的协议相比,它的开发难度非常小,有现成的配置工具,可直接生成MSG代码(简单来说,就是生成对应的函数接口供你直接调用即可),直接调用几个相应的函数接口即可,不需要自己封装、解析等;突出的优点在于配置和调用比较简单
1.配置
MAVLink通过xml文件,配置信息(MSG),这个MSG可以理解成我们需要接收或者发送的数据变量。比如:运动控制包含速度和距离,xml配置如下: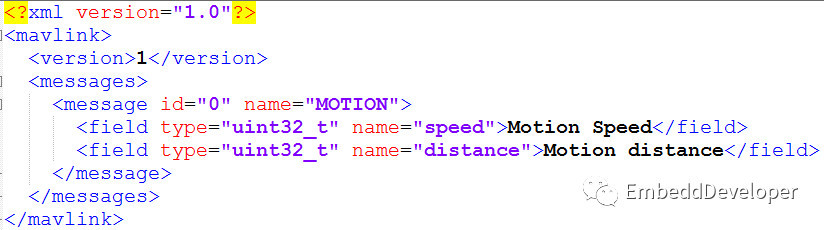
2.通过生成代码
从官网下载mavlink(git clone https://github.com/mavlink/mavlink.git)
mavlink官网(http://qgroundcontrol.org/mavlink/start),下拉到MAVLink Code and Generator如下图,得到mavlink源码有多种途径,这里选取用python生成。即点击MAVLink Generator (C/C++, Python)
git clone https://github.com/mavlink/mavlink mavlink-generator
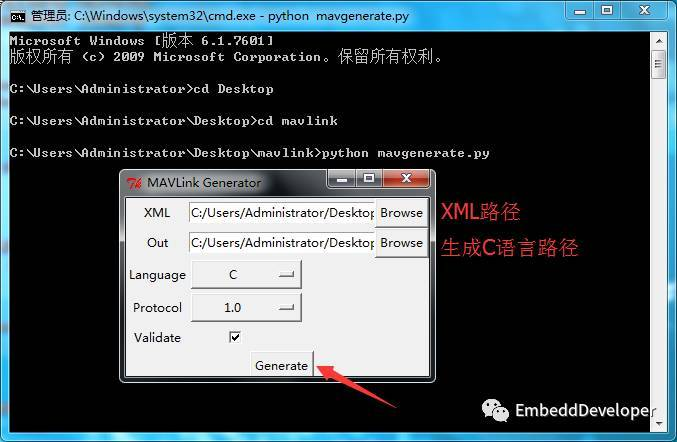
或者用PYTHON进行安装 pip install pymavlink,切换到mavlink-master目录下然后运行python mavegenerate.py ,然后修改xml并生成C库
3.调用代码
代码生成,只需要简单调用两个函数接口即可:
两个函数即可:
mavlink_msg_motion_pack:封包函数接口;
mavlink_msg_to_send_buffer:转换成发送的BUF
4编译排错:
keil工程里面全局编译一下,会发现好多的错误。这个错误跟编译器有关。一种方式是直接修改每一个错误,可以自行百度“mavlink移植 ”;当然还有一种方法,是在工程配置中加入如下配置:
--no_strict --gnu
目的是想让MAVLink这段代码采用gun的格式进行编译,但是要注意其他的代码需要保证是使用的keil的默认编译器__CC_ARM进行编译。再次编译会发现没有错误。
MAVLINK协议的更多相关文章
- Mavlink协议理解
来源:blog.csdn.net/super_mice/article/details/44836585 之前看了mavlink协议,网上关于mavlink的资料不多.本文大概总结了下对mavlink ...
- Mavlink 协议 理解
来源:blog.csdn.net/super_mice/article/details/44836585 之前看了mavlink协议,网上关于mavlink的资料不多.本文大概总结了下对mavlink ...
- mavlink协议移植问题
mavlink协议移植问题 mavlink源代码是一个代码库,使用的时候只需要将mavlink.h头文件包含到工程项目中即可. mavlink通信协议是无状态的连接,一般采用心跳消息跟踪系统是否存在. ...
- 移植mavlink协议到STM32详细教程
1准备材料, 首先准备一个带串口的stm32程序(这里选用整点原子的官方串口例程这里自己去找不讲)作者:恒久力行 QQ:624668529,然后去mavlink官网下载mavlink源码,这里重点讲解 ...
- Mavlink - 无人机通讯协议
http://qgroundcontrol.org/mavlink/start mavlink协议介绍https://pixhawk.ethz.ch/mavlink/ 消息简介 MAVLink简介 M ...
- Mavlink地面站编写之二--Mission Planner编译
软件下载: 本文使用VS2013进行编译和改动Mission Planner,其它版本号没有尝试过. 首先下载Mission Planner源码. https://github.com/ ...
- MAVLink v1.0详解——结构
本文针对 MAVLink v1.0版本,协议版本:3. MAVLink是为微型飞行器MAV(Micro Air Vehicle)设计的(LGPL)开源的通讯协议.是无人飞行器和地面站(Ground C ...
- Mavlink消息包解析
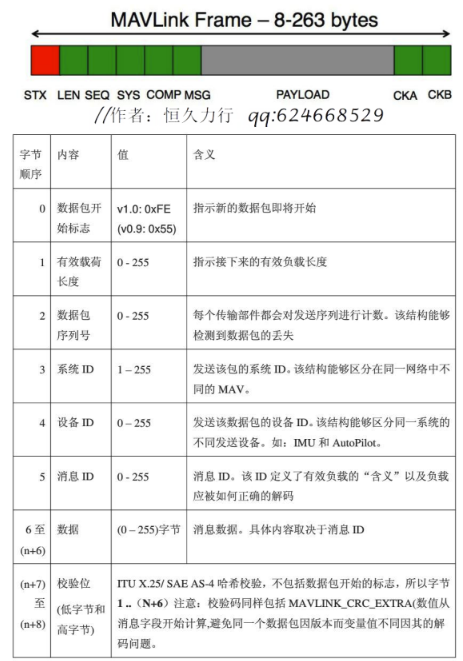
Byte Index 字节索引 Content 内容 Value 值 Explanation 说明 0 包起始标志 v1.0: 0xFE (v0.9: 0x55) 指示新消息帧的开始.在v1.0版本中 ...
- PX4/PixHawk无人机飞控应用开发
最近做的一个国防背景的field UAV项目,细节不能多谈,简单写点技术体会. 1.PX4/Pixhawk飞控软件架构简介 PX4是目前最流行的开源飞控板之一.PX4的软件系统实际上就是一个firmw ...
随机推荐
- linux系统下如何打开端口
1)vi /etc/sysconfig/iptables 2)-A INPUT -m state --state NEW -m tcp -p tcp --dport xxxxxxxxxx -j ACC ...
- 【转载】Hadoop面试(1)
转自:http://www.cnblogs.com/xiaolong1032/p/4504992.html 列举出hadoop常用的一些InputFormat InputFormat是用来对我们的输入 ...
- 378. 有序矩阵中第K小的元素
Q: A: //O(NK) class Solution { public: int kthSmallest(vector<vector<int>>& matrix, ...
- Vue实例 动态组件实现选项卡
动态组件 选项卡 有n种实现方法 哈哈哈哈 <style> #app{ width: 260px; height: 200px; background: #fff; box-shadow: ...
- vue 项目太大, 导致 javascript heap out of memory
原因: node 环境, 对单个进程的内存是有限制的, 但是现在前端项目太大, 所以我们需要根据当前机器环境, 手动加大node的内存限制 安装包 npm i increase-memory-limi ...
- ToolStripComboBox的DataSource和DataTable使用技巧
可以使用Items属性private void GetData() //一下数据均为测试{toolStripComboBox1.Items.Clear(); DataTabl ...
- 微信小程序遮罩层覆盖input失效
问题:微信小程序中,我们常使用遮罩层,如点击按钮弹出下拉框.弹框等等.若在遮罩层下存在input.textarea.canvas.camera.map.video等标签时,会出现遮罩层覆盖失效的问题. ...
- Educational Codeforces Round 78 (Rated for Div. 2)D(并查集+SET)
连边的点用并查集检查是否有环,如果他们的fa是同一个点说明绕了一圈绕回去了.n个点一共能连n-1条边,如果小于n-1条边说明存在多个联通块. #define HAVE_STRUCT_TIMESPEC ...
- Go_file操作
1. FileInfo package main import ( "os" "fmt" ) func main() { /* FileInfo:文件信息 in ...
- shell查找七天之前的文件
#!/bin/bashaweekago=`date -d "7 days ago" +%s`for f in $(ls) do stat -c %Y ${f} aa=`stat - ...