PCL点云特征描述与提取(4)
如何从一个深度图像(range image)中提取NARF特征
代码解析narf_feature_extraction.cpp
#include <iostream> #include <boost/thread/thread.hpp>
#include <pcl/range_image/range_image.h>
#include <pcl/io/pcd_io.h>
#include <pcl/visualization/range_image_visualizer.h>
#include <pcl/visualization/pcl_visualizer.h>
#include <pcl/features/range_image_border_extractor.h>
#include <pcl/keypoints/narf_keypoint.h>
#include <pcl/features/narf_descriptor.h>
#include <pcl/console/parse.h> typedef pcl::PointXYZ PointType; //参数的设置
float angular_resolution = 0.5f;
float support_size = 0.2f;
pcl::RangeImage::CoordinateFrame coordinate_frame = pcl::RangeImage::CAMERA_FRAME;
bool setUnseenToMaxRange = false;
bool rotation_invariant = true; //命令帮助
void
printUsage (const char* progName)
{
std::cout << "\n\nUsage: "<<progName<<" [options] <scene.pcd>\n\n"
<< "Options:\n"
<< "-------------------------------------------\n"
<< "-r <float> angular resolution in degrees (default "<<angular_resolution<<")\n"
<< "-c <int> coordinate frame (default "<< (int)coordinate_frame<<")\n"
<< "-m Treat all unseen points to max range\n"
<< "-s <float> support size for the interest points (diameter of the used sphere - "
"default "<<support_size<<")\n"
<< "-o <0/1> switch rotational invariant version of the feature on/off"
<< " (default "<< (int)rotation_invariant<<")\n"
<< "-h this help\n"
<< "\n\n";
} void
setViewerPose (pcl::visualization::PCLVisualizer& viewer, const Eigen::Affine3f& viewer_pose)//setViewerPose
{
Eigen::Vector3f pos_vector = viewer_pose * Eigen::Vector3f (, , );
Eigen::Vector3f look_at_vector = viewer_pose.rotation () * Eigen::Vector3f (, , ) + pos_vector;
Eigen::Vector3f up_vector = viewer_pose.rotation () * Eigen::Vector3f (, -, );
viewer.setCameraPosition (pos_vector[], pos_vector[], pos_vector[],
look_at_vector[], look_at_vector[], look_at_vector[],
up_vector[], up_vector[], up_vector[]);
} int
main (int argc, char** argv)
{
// 设置参数检测
if (pcl::console::find_argument (argc, argv, "-h") >= )
{
printUsage (argv[]);
return ;
}
if (pcl::console::find_argument (argc, argv, "-m") >= )
{
setUnseenToMaxRange = true;
cout << "Setting unseen values in range image to maximum range readings.\n";
}
if (pcl::console::parse (argc, argv, "-o", rotation_invariant) >= )
cout << "Switching rotation invariant feature version "<< (rotation_invariant ? "on" : "off")<<".\n";
int tmp_coordinate_frame;
if (pcl::console::parse (argc, argv, "-c", tmp_coordinate_frame) >= )
{
coordinate_frame = pcl::RangeImage::CoordinateFrame (tmp_coordinate_frame);
cout << "Using coordinate frame "<< (int)coordinate_frame<<".\n";
}
if (pcl::console::parse (argc, argv, "-s", support_size) >= )
cout << "Setting support size to "<<support_size<<".\n";
if (pcl::console::parse (argc, argv, "-r", angular_resolution) >= )
cout << "Setting angular resolution to "<<angular_resolution<<"deg.\n";
angular_resolution = pcl::deg2rad (angular_resolution); //打开一个磁盘中的.pcd文件 但是如果没有指定就会自动生成
pcl::PointCloud<PointType>::Ptr point_cloud_ptr (new pcl::PointCloud<PointType>);
pcl::PointCloud<PointType>& point_cloud = *point_cloud_ptr; pcl::PointCloud<pcl::PointWithViewpoint> far_ranges;
Eigen::Affine3f scene_sensor_pose (Eigen::Affine3f::Identity ());
std::vector<int> pcd_filename_indices = pcl::console::parse_file_extension_argument (argc, argv, "pcd");
if (!pcd_filename_indices.empty ()) //检测是否有far_ranges.pcd
{
std::string filename = argv[pcd_filename_indices[]];
if (pcl::io::loadPCDFile (filename, point_cloud) == -)
{
cerr << "Was not able to open file \""<<filename<<"\".\n";
printUsage (argv[]);
return ;
}
scene_sensor_pose = Eigen::Affine3f (Eigen::Translation3f (point_cloud.sensor_origin_[],
point_cloud.sensor_origin_[],
point_cloud.sensor_origin_[])) *
Eigen::Affine3f (point_cloud.sensor_orientation_);
std::string far_ranges_filename = pcl::getFilenameWithoutExtension (filename)+"_far_ranges.pcd";
if (pcl::io::loadPCDFile (far_ranges_filename.c_str (), far_ranges) == -)
std::cout << "Far ranges file \""<<far_ranges_filename<<"\" does not exists.\n";
}
else
{
setUnseenToMaxRange = true;
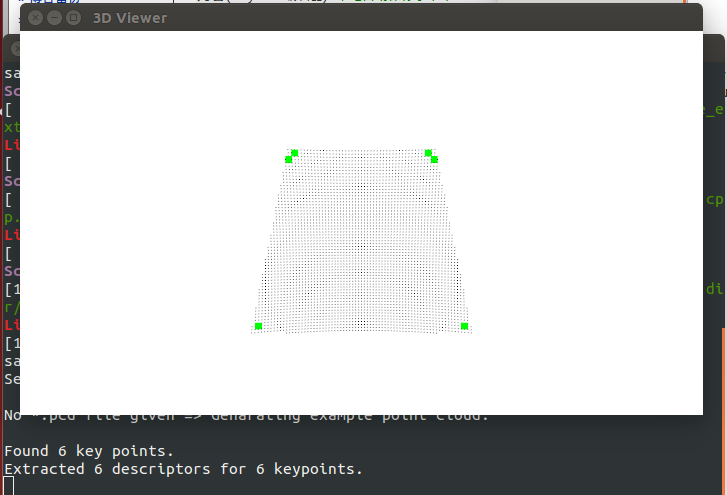
cout << "\nNo *.pcd file given => Genarating example point cloud.\n\n";
for (float x=-0.5f; x<=0.5f; x+=0.01f) //如果没有打开的文件就生成一个矩形的点云
{
for (float y=-0.5f; y<=0.5f; y+=0.01f)
{
PointType point; point.x = x; point.y = y; point.z = 2.0f - y;
point_cloud.points.push_back (point);
}
}
point_cloud.width = (int) point_cloud.points.size (); point_cloud.height = ;
} //从点云中建立生成深度图
float noise_level = 0.0;
float min_range = 0.0f;
int border_size = ;
boost::shared_ptr<pcl::RangeImage> range_image_ptr (new pcl::RangeImage);
pcl::RangeImage& range_image = *range_image_ptr;
range_image.createFromPointCloud (point_cloud, angular_resolution, pcl::deg2rad (360.0f), pcl::deg2rad (180.0f),
scene_sensor_pose, coordinate_frame, noise_level, min_range, border_size);
range_image.integrateFarRanges (far_ranges);
if (setUnseenToMaxRange)
range_image.setUnseenToMaxRange (); //打开3D viewer并加入点云
pcl::visualization::PCLVisualizer viewer ("3D Viewer");
viewer.setBackgroundColor (, , );
pcl::visualization::PointCloudColorHandlerCustom<pcl::PointWithRange> range_image_color_handler (range_image_ptr, , , );
viewer.addPointCloud (range_image_ptr, range_image_color_handler, "range image");
viewer.setPointCloudRenderingProperties (pcl::visualization::PCL_VISUALIZER_POINT_SIZE, , "range image");
//viewer.addCoordinateSystem (1.0f, "global");
//PointCloudColorHandlerCustom<PointType> point_cloud_color_handler (point_cloud_ptr, 150, 150, 150);
//viewer.addPointCloud (point_cloud_ptr, point_cloud_color_handler, "original point cloud");
viewer.initCameraParameters ();
setViewerPose (viewer, range_image.getTransformationToWorldSystem ());
//显示
pcl::visualization::RangeImageVisualizer range_image_widget ("Range image");
range_image_widget.showRangeImage (range_image); //提取NARF特征
pcl::RangeImageBorderExtractor range_image_border_extractor; //申明深度图边缘提取器
pcl::NarfKeypoint narf_keypoint_detector; //narf_keypoint_detector为点云对象 narf_keypoint_detector.setRangeImageBorderExtractor (&range_image_border_extractor);
narf_keypoint_detector.setRangeImage (&range_image);
narf_keypoint_detector.getParameters ().support_size = support_size; //获得特征提取的大小 pcl::PointCloud<int> keypoint_indices;
narf_keypoint_detector.compute (keypoint_indices);
std::cout << "Found "<<keypoint_indices.points.size ()<<" key points.\n"; // ----------------------------------------------
// -----Show keypoints in range image widget-----
// ----------------------------------------------
//for (size_t i=0; i<keypoint_indices.points.size (); ++i)
//range_image_widget.markPoint (keypoint_indices.points[i]%range_image.width,
//keypoint_indices.points[i]/range_image.width); //在3Dviewer显示提取的特征信息
pcl::PointCloud<pcl::PointXYZ>::Ptr keypoints_ptr (new pcl::PointCloud<pcl::PointXYZ>);
pcl::PointCloud<pcl::PointXYZ>& keypoints = *keypoints_ptr;
keypoints.points.resize (keypoint_indices.points.size ());
for (size_t i=; i<keypoint_indices.points.size (); ++i)
keypoints.points[i].getVector3fMap () = range_image.points[keypoint_indices.points[i]].getVector3fMap ();
pcl::visualization::PointCloudColorHandlerCustom<pcl::PointXYZ> keypoints_color_handler (keypoints_ptr, , , );
viewer.addPointCloud<pcl::PointXYZ> (keypoints_ptr, keypoints_color_handler, "keypoints");
viewer.setPointCloudRenderingProperties (pcl::visualization::PCL_VISUALIZER_POINT_SIZE, , "keypoints"); //在关键点提取NARF描述子
std::vector<int> keypoint_indices2;
keypoint_indices2.resize (keypoint_indices.points.size ());
for (unsigned int i=; i<keypoint_indices.size (); ++i) // This step is necessary to get the right vector type
keypoint_indices2[i]=keypoint_indices.points[i]; ///建立NARF关键点的索引向量,此矢量作为NARF特征计算的输入来使用 pcl::NarfDescriptor narf_descriptor (&range_image, &keypoint_indices2);//创建narf_descriptor对象。并给了此对象输入数据(特征点索引和深度像)
narf_descriptor.getParameters ().support_size = support_size;//support_size确定计算描述子时考虑的区域大小
narf_descriptor.getParameters ().rotation_invariant = rotation_invariant; //设置旋转不变的NARF描述子
pcl::PointCloud<pcl::Narf36> narf_descriptors; //创建Narf36的点类型输入点云对象并进行实际计算
narf_descriptor.compute (narf_descriptors); //计算描述子
cout << "Extracted "<<narf_descriptors.size ()<<" descriptors for " //打印输出特征点的数目和提取描述子的数目
<<keypoint_indices.points.size ()<< " keypoints.\n"; //主循环函数
while (!viewer.wasStopped ())
{
range_image_widget.spinOnce (); // process GUI events
viewer.spinOnce ();
pcl_sleep(0.01);
}
}
编译运行./narf_feature_extraction -m
这将自动生成一个呈矩形的点云,检测的特征点处在角落处,参数-m是必要的,因为矩形周围的区域观测不到,但是属于边界部分,因此系统无法检测到这部分区域的特征点,选项-m将看不到的区域改变到最大范围读取,从而使系统能够使用这些边界区域。
(2)特征描述算子算法基准化分析
使用FeatureEvaluationFramework类对不同的特征描述子算法进行基准测试,基准测试框架可以测试不同种类的特征描述子算法,通过选择输入点云,算法参数,下采样叶子大小,搜索阀值等独立变量来进行测试。
使用FeatureCorrespondenceTest类执行一个单一的“基于特征的对应估计测试”执行以下的操作
1.FeatureCorrespondenceTest类取两个输入点云(源与目标) 它将指定算法和参数,在每个点云中计算特征描述子
2.基于n_D特征空间中的最近邻元素搜索,源点云中的每个特征将和目标点云中对应的特征相对照
3 。对于每一个点,系统将把估计的目标点的三维位置和之前已知的实际位置相比
4 。如果这两个点很接近(取决与决定的阀值)那么对应就成功,否则失败
5 计算并保存成功和失败的总数,以便进一步分析
微信公众号号可扫描二维码一起共同学习交流

PCL点云特征描述与提取(4)的更多相关文章
- PCL点云特征描述与提取(1)
3D点云特征描述与提取是点云信息处理中最基础也是最关键的一部分,点云的识别.分割,重采样,配准曲面重建等处理大部分算法,都严重依赖特征描述与提取的结果.从尺度上来分,一般分为局部特征的描述和全局特征的 ...
- PCL点云特征描述与提取(3)
快速点特征直方图(FPFH)描述子 已知点云P中有n个点,那么它的点特征直方图(PFH)的理论计算复杂度是,其中k是点云P中每个点p计算特征向量时考虑的邻域数量.对于实时应用或接近实时应用中,密集点云 ...
- PCL点云特征描述与提取(2)
点特征直方图(PFH)描述子 正如点特征表示法所示,表面法线和曲率估计是某个点周围的几何特征基本表示法.虽然计算非常快速容易,但是无法获得太多信息,因为它们只使用很少的几个参数值来近似表示一个点的k邻 ...
- PCL点云分割(1)
点云分割是根据空间,几何和纹理等特征对点云进行划分,使得同一划分内的点云拥有相似的特征,点云的有效分割往往是许多应用的前提,例如逆向工作,CAD领域对零件的不同扫描表面进行分割,然后才能更好的进行空洞 ...
- 第十六节、特征描述符BRIEF(附源码)
我们已经知道SIFT算法采用128维的特征描述子,由于描述子用的是浮点数,所以它将会占用512字节的空间.类似的SUFR算法,一般采用64维的描述子,它将占用256字节的空间.如果一幅图像中有1000 ...
- PCL点云配准(1)
在逆向工程,计算机视觉,文物数字化等领域中,由于点云的不完整,旋转错位,平移错位等,使得要得到的完整的点云就需要对局部点云进行配准,为了得到被测物体的完整数据模型,需要确定一个合适的坐标系,将从各个视 ...
- PCL点云库(Point Cloud Library)简介
博客转载自:http://www.pclcn.org/study/shownews.php?lang=cn&id=29 什么是PCL PCL(Point Cloud Library)是在吸收了 ...
- pcl点云文件格式
PCD版本 在点云库(PCL)1.0版本发布之前,PCD文件格式有不同的修订号.这些修订号用PCD_Vx来编号(例如,PCD_V5.PCD_V6.PCD_V7等等),代表PCD文件的0.x版本号.然而 ...
- PCL点云配准(3)
(1)关于点云的配准 1.首先给定源点云与目标点云. 2.提取特征确定对应点 3.估计匹配点对应的变换矩阵 4.应用变换矩阵到源点云到目标点云的变换 配准的流程图 通过特征点的匹配步骤 (1)计算源点 ...
随机推荐
- php获取图片RGB颜色值的例子
php获取图片RGB颜色值的例子 很多图片站点都会根据用户上传的图片检索出图片的主要颜色值,然后在通过颜色搜索相关的图片. 之前按照网上的方法将图片缩放(或者马赛克)然后遍历每个像素点,然后统计处RG ...
- Java常考面试题(一)
序言 我是一只乱飞乱撞的菜鸟,写的文章目前是以记录自己学习,和方便以后查看,期待日后不久能通过自己的努力,获得一点小小的成功,然后写出我的学习经验总结性文章来. ---WH 一.什么是虚拟机?为什么J ...
- 关于ios7的适配问题
过年回来一直搞ios7的项目适配,也算是有些眉目. 方法一:直接动用Window #if __IPHONE_OS_VERSION_MAX_ALLOWED>=__IPHONE_7_0 [appli ...
- Java经典问题:传值与传引用?
转自:http://developer.51cto.com/art/201104/254715.htm Java到底是传值还是传引用?相信很少有人能完全回答正确.通常的说法是:对于基本数据类型(整型. ...
- 第九章·词典
第九章·词典 散列:原理 散列是一种赖以高效组织数据并实现相关算法的重要思想. 这样的思想背后的原理却非常直观.简单. 上图是IBM公司和联想公司的服务电话号码,能够看到这样的号码是由数字和字母共同组 ...
- linux关闭selinux和firewall
sed -i '/SELINUX/s/enforcing/disabled/' /etc/selinux/config setenforce 0
- haproxy 配置https 同时技持443 80端口
确定haproxy支持https [root@c01 sbin]# ldd haproxy |grep ssl libssl.so.10 => /usr/lib64/libssl.so.10 ( ...
- angular学习笔记(三十)-指令(6)-transclude()方法(又称linker()方法)-模拟ng-repeat指令
在angular学习笔记(三十)-指令(4)-transclude文章的末尾提到了,如果在指令中需要反复使用被嵌套的那一坨,需要使用transclude()方法. 在angular学习笔记(三十)-指 ...
- excel 添加换行符,去除换行符:
excel 中添加换行符: :alt+enter 去掉excel中的换行符有三种方法: 注:解决过程中翻阅其他博客,看到如下方式: 1.看到有的说全选后“取消自动换行”,保存后,再打开,依然存在换行符 ...
- python(39):argparse的用法,从外部传入指定参数
直接上例子: # /usr/bin/env python # coding=utf8 import os import argparse import logging import sys FORMA ...