Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks论文理解
一、创新点和解决的问题
创新点
设计Region Proposal Networks【RPN】,利用CNN卷积操作后的特征图生成region proposals,代替了Selective Search、EdgeBoxes等方法,速度上提升明显;
训练Region Proposal Networks与检测网络【Fast R-CNN】共享卷积层,大幅提高网络的检测速度。
解决的问题
继Fast R-CNN后,在CPU上实现的区域建议算法Selective Search【2s/image】、EdgeBoxes【0.2s/image】等成了物体检测速度提升上的最大瓶颈。
二、整体框架
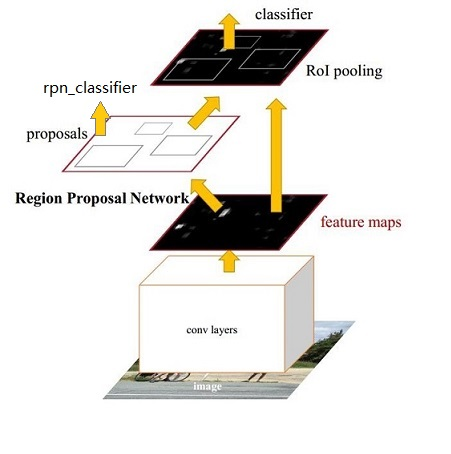
我们先整体的介绍下上图中各层主要的功能:
1)、Conv layers提取特征图:
作为一种CNN网络目标检测方法,Faster RCNN首先使用一组基础的conv+relu+pooling层提取input image的feature maps,该feature maps会用于后续的RPN层和全连接层
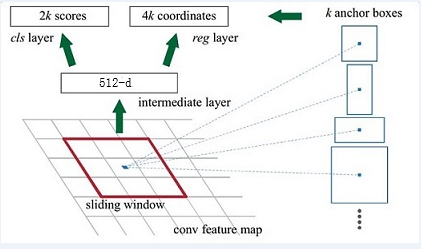
2)、RPN(Region Proposal Networks):
RPN网络主要用于生成region proposals,首先生成一堆Anchor box,对其进行裁剪过滤后通过softmax判断anchors属于前景(foreground)或者后景(background),即是物体or不是物体,所以这是一个二分类;同时,另一分支bounding box regression修正anchor box,形成较精确的proposal(注:这里的较精确是相对于后面全连接层的再一次box regression而言)
3)、Roi Pooling:
该层利用RPN生成的proposals和VGG16最后一层得到的feature map,得到固定大小的proposal feature map,进入到后面可利用全连接操作来进行目标识别和定位
4)、Classifier:
会将Roi Pooling层形成固定大小的feature map进行全连接操作,利用Softmax进行具体类别的分类,同时,利用L1 Loss完成bounding box regression回归操作获得物体的精确位置.
三、网络结构
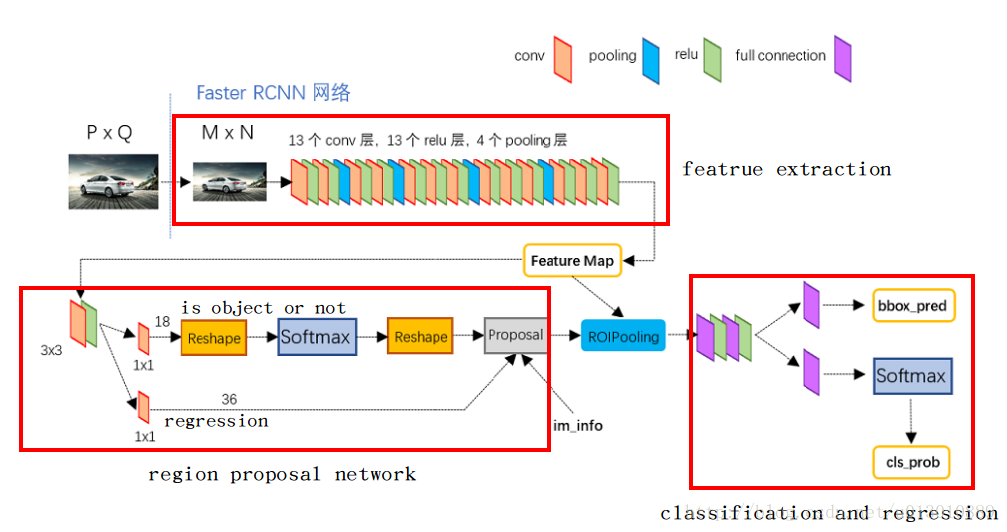
现在,通过上图开始逐层分析
1)、Conv layers
Faster RCNN首先是支持输入任意大小的图片的,比如上图中输入的P*Q,进入网络之前对图片进行了规整化尺度的设定,如可设定图像短边不超过600,图像长边不超过1000,我们可以假定M*N=1000*600(如果图片少于该尺寸,可以边缘补0,即图像会有黑色边缘)
① 13个conv层:kernel_size=3,pad=1,stride=1;
卷积公式:
所以,conv层不会改变图片大小(即:输入的图片大小=输出的图片大小)
② 13个relu层:激活函数,不改变图片大小
③ 4个pooling层:kernel_size=2,stride=2;pooling层会让输出图片是输入图片的1/2
经过Conv layers,图片大小变成(M/16)*(N/16),即:60*40(1000/16≈60,600/16≈40);则,Feature Map就是60*40*512-d(注:VGG16是512-d,ZF是256-d),表示特征图的大小为60*40,数量为512
2)、RPN(Region Proposal Networks):
为了进一步更清楚的看懂RPN的工作原理,将Caffe版本下的网络图贴出来,对照网络图进行讲解会更清楚
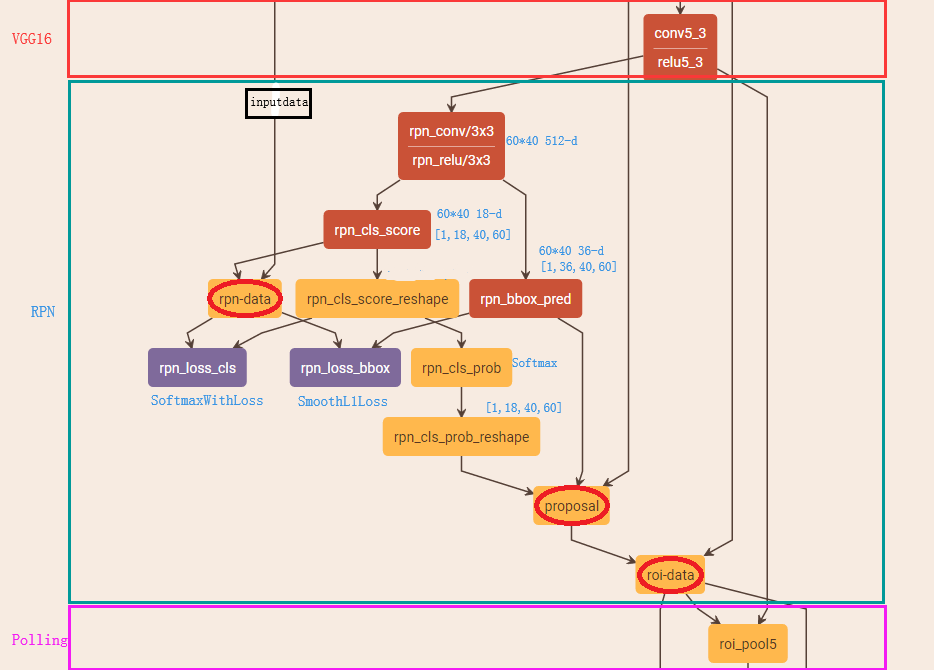
(2.1) rpn_cls、 rpn_bbox
Feature Map进入RPN后,先经过一次3*3的卷积,同样,特征图大小依然是60*40,数量512,这样做的目的应该是进一步集中特征信息,接着看到两个全卷积,即kernel_size=1*1,p=0,stride=1;
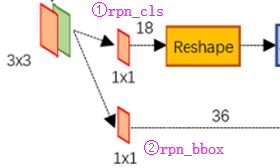
如上图中标识:
① rpn_cls:60*40*512-d ⊕ 1*1*512*18 ==> 60*40*9*2
逐像素对其9个Anchor box进行二分类
② rpn_bbox:60*40*512-d ⊕ 1*1*512*36==>60*40*9*4
逐像素得到其9个Anchor box四个坐标信息(其实是偏移量,后面介绍)
如下图所示:
(2.2)、Anchors的生成规则
前面提到经过Conv layers后,图片大小变成了原来的1/16,令feat_stride=16,在生成Anchors时,我们先定义一个base_anchor,大小为16*16的box(因为特征图(60*40)上的一个点,可以对应到原图(1000*600)上一个16*16大小的区域),源码中转化为[0,0,15,15]的数组,参数ratios=[0.5, 1, 2]scales=[8, 16, 32]
先看[0,0,15,15],面积保持不变,长、宽比分别为[0.5, 1, 2]是产生的Anchors box
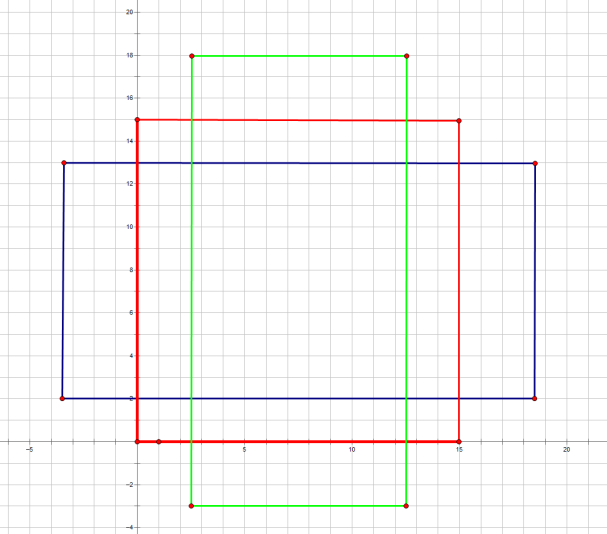
如果经过scales变化,即长、宽分别均为 (16*8=128)、(16*16=256)、(16*32=512),对应anchor box如图
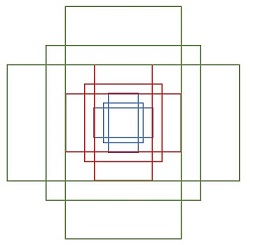
综合以上两种变换,最后生成9个Anchor box
特征图大小为60*40,所以会一共生成60*40*9=21600个Anchor box
源码中,通过width:(0~60)*16,height(0~40)*16建立shift偏移量数组,再和base_ancho基准坐标数组累加,得到特征图上所有像素对应的Anchors的坐标值,是一个[216000,4]的数组
(2.3)rpn-data
这一层主要是为特征图60*40上的每个像素生成9个Anchor box,并且对生成的Anchor box进行过滤和标记,参照源码,过滤和标记规则如下:
① 去除掉超过1000*600这原图的边界的anchor box
② 如果anchor box与ground truth的IoU值最大,标记为正样本,label=1
③ 如果anchor box与ground truth的IoU>0.7,标记为正样本,label=1
④ 如果anchor box与ground truth的IoU<0.3,标记为负样本,label=0
剩下的既不是正样本也不是负样本,不用于最终训练,label=-1
除了对anchor box进行标记外,另一件事情就是计算anchor box与ground truth之间的偏移量
令:ground truth:标定的框也对应一个中心点位置坐标x*,y*和宽高w*,h*
anchor box: 中心点位置坐标x_a,y_a和宽高w_a,h_a
所以,偏移量:
△x=(x*-x_a)/w_a △y=(y*-y_a)/h_a
△w=log(w*/w_a) △h=log(h*/h_a)
通过ground truth box与预测的anchor box之间的差异来进行学习,从而是RPN网络中的权重能够学习到预测box的能力
(2.4)rpn_loss_cls、rpn_loss_bbox、rpn_cls_prob
‘rpn_loss_cls’、‘rpn_loss_bbox’是分别对应softmax,smooth L1计算损失函数,‘rpn_cls_prob’计算概率值(可用于下一层的nms非最大值抑制操作)
(2.5)proposal
源码中,会重新生成60*40*9个anchor box,然后累加上训练好的△x, △y, △w, △h,从而得到了相较于之前更加准确的预测框region proposal,进一步对预测框进行越界剔除和使用nms非最大值抑制,剔除掉重叠的框;比如,设定IoU为0.7的阈值,即仅保留覆盖率不超过0.7的局部最大分数的box(粗筛)。最后留下大约2000个anchor,然后再取前N个box(比如300个);这样,进入到下一层ROI Pooling时region proposal大约只有300个
(2.6)roi_data
为了避免定义上的误解,我们将经过‘proposal’后的预测框称为region proposal(其实,RPN层的任务其实已经完成,roi_data属于为下一层准备数据)
主要作用:
① RPN层只是来确定region proposal是否是物体(是/否),这里根据region proposal和ground truth box的最大重叠指定具体的标签(就不再是二分类问题了,参数中指定的是81类)
② 计算region proposal与ground truth boxes的偏移量,计算方法和之前的偏移量计算公式相同
经过这一步后的数据输入到ROI Pooling层进行进一步的分类和定位.
剩下的就是Fast R-CNN了。
参考:
https://www.cnblogs.com/wangyong/p/8513563.html
https://blog.csdn.net/WoPawn/article/details/52223282
Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks论文理解的更多相关文章
- Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks(理解)
0 - 背景 R-CNN中检测步骤分成很多步骤,fast-RCNN便基于此进行改进,将region proposals的特征提取融合成共享卷积层问题,但是,fast-RCNN仍然采用了selectiv ...
- 中文版 Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks
Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks 摘要 最先进的目标检测网络依靠区域提出算法 ...
- 深度学习论文翻译解析(十三):Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks
论文标题:Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks 标题翻译:基于区域提议(Regi ...
- [论文理解] Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks
Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks 简介 Faster R-CNN是很经典的t ...
- 目标检测(四)Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks
作者:Shaoqing Ren, Kaiming He, Ross Girshick, and Jian Sun SPPnet.Fast R-CNN等目标检测算法已经大幅降低了目标检测网络的运行时间. ...
- 论文阅读笔记二十七:Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks(CVPR 2016)
论文源址:https://arxiv.org/abs/1506.01497 tensorflow代码:https://github.com/endernewton/tf-faster-rcnn 室友对 ...
- Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks
将 RCN 中下面 3 个独立模块整合在一起,减少计算量: CNN:提取图像特征 SVM:目标分类识别 Regression 模型:定位 不对每个候选区域独立通过 CN 提取特征,将整个图像通过 CN ...
- 【CV论文阅读】Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks
由RCNN到FAST RCNN一个很重要的进步是实现了多任务的训练,但是仍然使用Selective Search算法来获得ROI,而FASTER RCNN就是把获得ROI的步骤使用一个深度网络RPN来 ...
- R-CNN(Rich feature hierarchies for accurate object detection and semantic segmentation)论文理解
论文地址:https://arxiv.org/pdf/1311.2524.pdf 翻译请移步: https://www.cnblogs.com/xiaotongtt/p/6691103.html ht ...
随机推荐
- python三步实现人脸识别
原文地址https://www.toutiao.com/a6475797999176417550 Face Recognition软件包 这是世界上最简单的人脸识别库了.你可以通过Python引用或者 ...
- Leetcode: Binary Tree Postorder Transversal
Given a binary tree, return the postorder traversal of its nodes' values. For example: Given binary ...
- map() 方法
1. 方法概述 map() 方法返回一个由原数组中的每个元素调用一个指定方法后的返回值组成的新数组. 2. 例子 2.1 在字符串中使用map 在一个 String 上使用 map 方法获取字符串中每 ...
- 【最大连接数】Linux的文件最大连接数
Too many open files ==================================== 查看当前操作系统连接数设置 ulimit -a =================== ...
- python recv()是什么
socket有个recv方法,recv有一个参数,指定数据缓冲区的大小 但是现在的问题就是不知道将要接受的数据的大小到底是多少,可能只有几个字节,可能会有几M,google了一下socket的入门文章 ...
- Hive 入门学习线路指导
hive被大多数企业使用,学习它,利于自己掌握企业所使用的技术,这里从安装使用到概念.原理及如何使用遇到的问题,来讲解hive,希望对大家有所帮助. 此篇内容较多:看完之后需要达到的目标: 1.hiv ...
- Linux服务器---安装Tomcat
安装Tomcat Tomcat作为web服务器实现了对servlet和jsp的支持,centos目前不支持yum方式安装.在使用Tomcat之前,确保你已经安装并配置好了jdk,而且jdk的版本要和t ...
- DBMS_OUTPUT.PUT_LINE()方法的简单介绍
1.最基本的DBMS_OUTPUT.PUT_LINE()方法. 随便在什么地方,只要是BEGIN和END之间,就可以使用DBMS_OUTPUT.PUT_LINE(output);然而这会有一个问题,就 ...
- Vue源码解析之数组变异
力有不逮的对象 众所周知,在 Vue 中,直接修改对象属性的值无法触发响应式.当你直接修改了对象属性的值,你会发现,只有数据改了,但是页面内容并没有改变. 这是什么原因? 原因在于: Vue 的响应式 ...
- 20145332卢鑫 MSF基础应用
20145332卢鑫 MSF基础应用 实验过程 靶机的IP地址:192.168.10.160 Kali的IP地址:192.168.10.128 1.一个主动攻击 攻击XP系统的漏洞:ms08_067 ...