树莓派4B智能小车机器套件——入手组装实验记录
树莓派4B智能小车机器套件——入手组装实验记录
4WD智能小车(4WD SMART ROBOT KIT),支持Arduino、51、STM32、Raspberry Pi等4个版本。本套件采用的是树莓派4B。树莓派4B版特点,强大的树莓派控制器适合创客达人、树莓派爱好者。由于树莓派自带wifi功能使此版本小车轻松拓展摄像头云台。
其他版本特点。1.Arduino版(Arduino UNO),适合低年龄、低门槛使用。带有图形编程软件,简单易懂。Arduino控制器难度低,普及率高。但由于较少的IO口资源使得此版本小车巡线模式和寻光模式、避障/跟随模式不能同时使用。2.STM32版(STM32F103C8T6核心板),更加适合深入的C语言编程学习,符合国内教育体制。是学习STM32的不错选择。亦是电子竞赛、项目开发、毕业设计等的得力助手。3. 51单片机开发板,适合基础的C语言编程学习,是高校教材的延伸,群众基础广泛。
一、入手组装(步骤)
0.注意事项
1.开箱视频。4WD智能小车套件,开箱视频(火狐浏览器可以看到),见组装1部件清单图和视频;
2.扩展板介绍,视频;
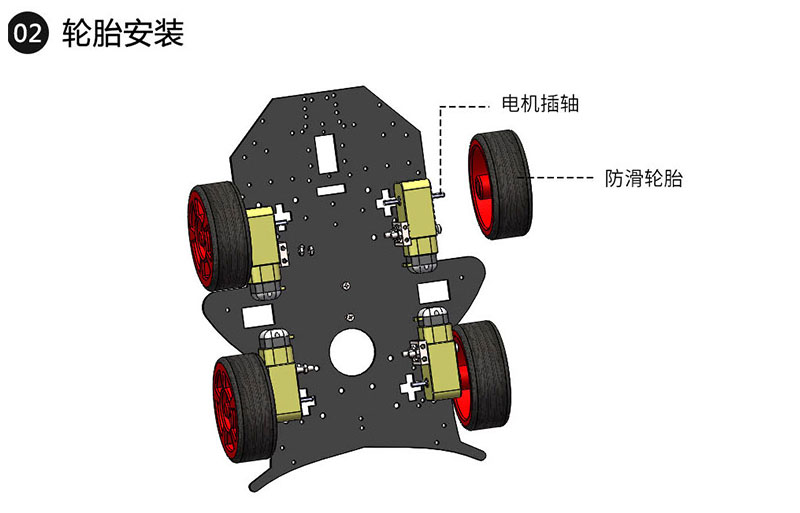
3.电机轮胎安装
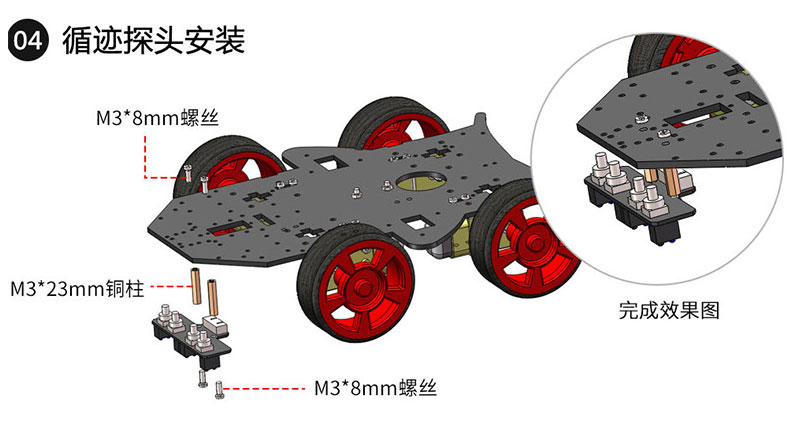
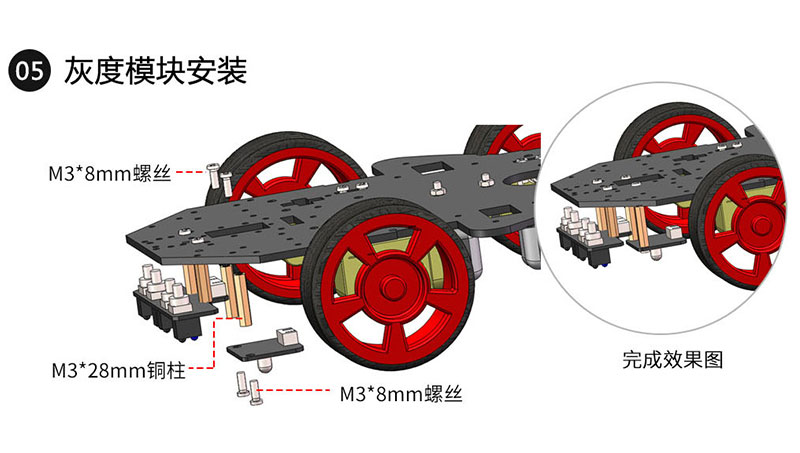
4.电池盒与传感器模块安装
5.扩展板安装(启动之前需要使用铜柱固定扩展
6.舵机/超声波/探照灯模块安装
7.(带摄像头版)摄像头模块安装
8.功能调试
9.学习向导介绍
10.电池的充电与注意事项
电池使用注意事项:
1.小车电池采用直插式充电,充电器接口直接插入电池的充电接口即可充电。
2.小车不能边充电边使用。
3.电压在9V左右就需要及时充电,充满电时电池电压约12.6V。
4.在长时间不使用小车的情况下应该把小车底板的电池接线拔下来,因为就算待机状态电池也会有损耗的,长时间不使用电池前需要把电池充满。
5.电池充电时,充电器指示灯亮红灯,充满亮绿灯,充电完成后应及时拔掉充电器和电源,避免过充损坏电池。
6.动力电池充电时需充小车上取下来充电,否则容易导致电池损坏。
11.树莓派使用注意事项
12.电池接线太靠近前轮的解决方法。如何您觉得插入电池组了之后,电池组的接线离前轮太近了,您可以采取以下方法解决:在支撑拓展板的铜柱上下各加一个垫片就可以解决这个问题了。
13.摄像头无法使用解决方案

组装1部件清单
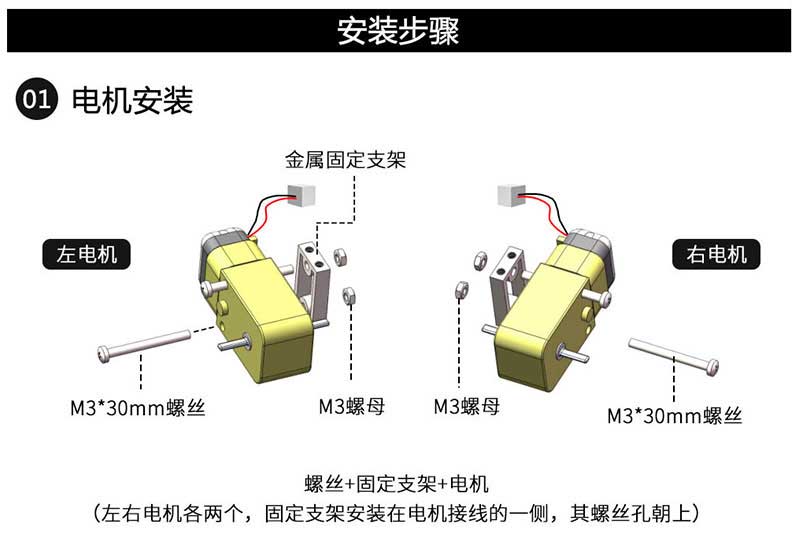
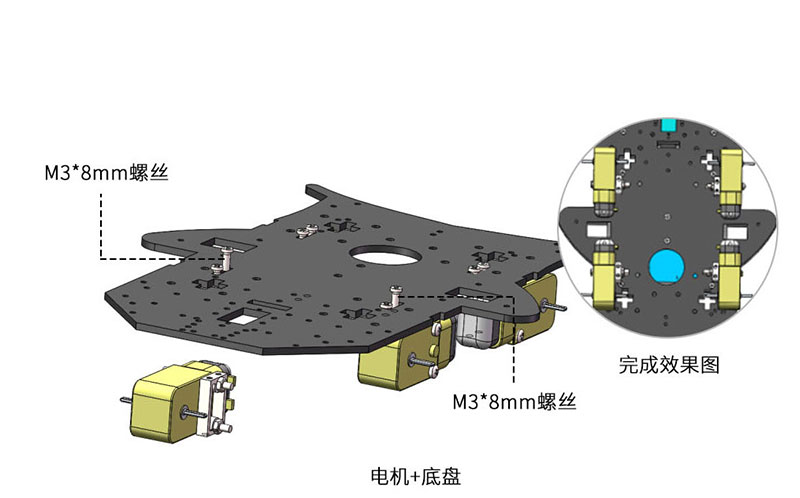
电机轮胎安装
电机轮胎安装2
3.电机轮胎安装3

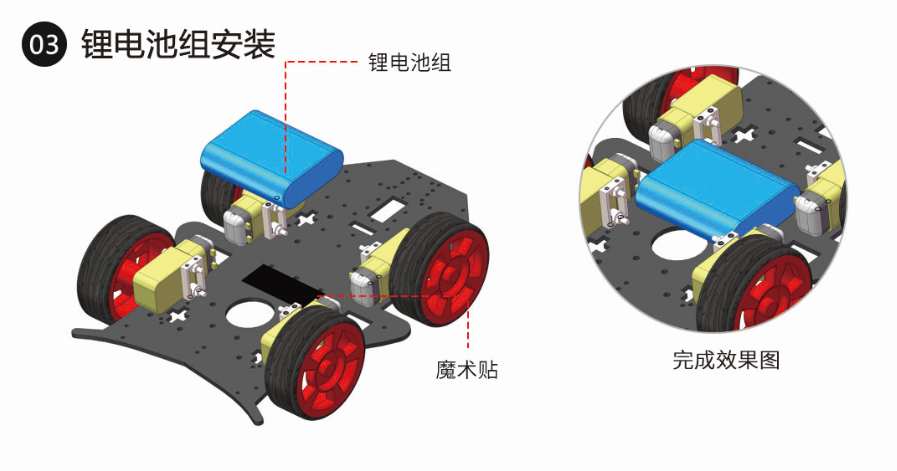
电池盒与传感器模块安装1
电池盒与传感器模块安装2
电池盒与传感器模块安装3
电池盒与传感器模块安装4
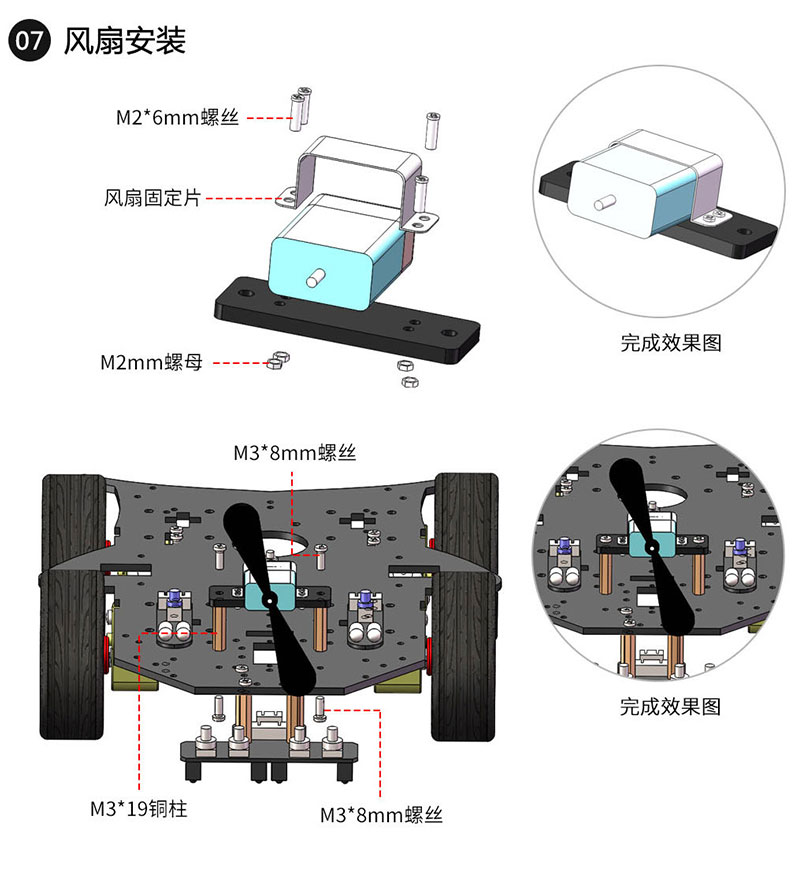
电池盒与传感器模块安装6-风扇安装
二、组装与调试体会(要点)
1.组装要点
资料获取网址:http://www.yahboom.com/study/4wd。网站上有说明和视频。组装时,可以看一下视频,获得一个整体感觉。视频在360浏览器下看不到,用火狐就OK。
然后按照说明组装完成,组装后发现,电源现揩轮胎,加了2个垫片后,解决问题;接各种配件,如4路巡线器、雷达、彩灯、巡光、摄像头及云台的供电线路,前舵机、垂直舵机、水平舵机的供电线是三色排线,需要按照说明书进行接插。装3个舵机时,前两个都带铜柱的,穿过固定孔时,孔大些,亚克力板孔稍微窄了一点,用剪刀,刮以下即可;第3个舵机,即摄像头垂直方向的,没有铜柱,是从里面向外面穿,螺丝固定即可,开始我从外向里面穿,排线进不去,我用刀削、用锯锯,还是不行,后来才发现不同之处。
2.调试要点
组装完成,通电,都亮了。扫二维码,控制机器,没有反应。原来有地方没到位。我按照说明调试了4路巡线和2路巡光器上的电阻,都正常了亮灭灯。后来发现,盒子里面还多了1装闪卡和3个散热片。我看了又看,没有发现插卡的位置,后来问售后,在树莓派板子的反背有1一个插卡的槽,查好后,再固定螺丝。把锂电子充满点,再通电,用手机扫二维码即可控制小车,前后左右运动、灯光变色、蜂鸣,巡物、巡线,测试了一遍,均OK。最后,经过咨询售后,确定了三个散热片的位置,把三个散热片装上去。
到这里,摄像头的控制还没有开始。
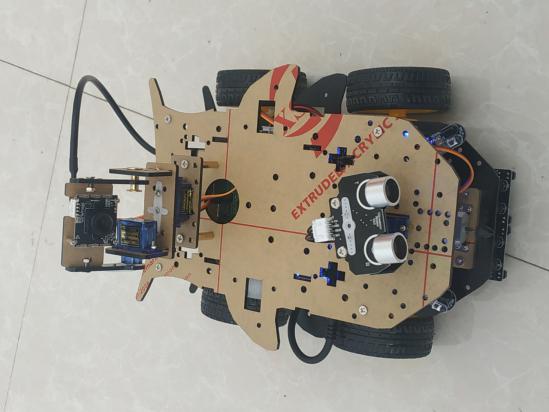
组装成果图
三、智能训练
1.资料下载
智能的训练,需要进一步的编程,需要下载相关资料进行学习。
记得自己的订单号就可以了:14107********6
BST-4WD智能小车: http://www.yahboom.com/study/4wd 密码:****
输入提取码时,原来360和火狐都报错。我以为是密码错误,问售后,售后根据订单号,查出了我的密码,跟说明书上是一样的。后来,我用谷歌浏览器下载,立马正常提示:
提取码:r**n,请复制以后使用!
看视频与看说明,看说明更重要。说明缺失的地方,需要问售后,售后点拨很重要。
下载的资料很全面,可以进行python编程控制。等待下一步的编程训练。树莓派4B只支持Linux系统,是Debian系的,系统卡16GShanDisk,是目前最高的了。
2.AI智能训练



Write by 一策书·万江波·岳阳
2021年1月8日
树莓派4B智能小车机器套件——入手组装实验记录的更多相关文章
- 树莓派-4WD智能小车操作小结
树莓派-4WD智能小车操作小结 树莓派4B-4WD智能小车,双层结构,第一层结构为:小车扩展板(底层)+树莓派主板,通过铜柱隔离固定,小车扩展板相当于计算机的外设扩展板:上面一层为第二层,是三个舵机承 ...
- 20135223/20135234/20135229小组——亚博 Arduino智能小车实践报告
实验名称:Arduino智能小车组装和综合测试 实验小组成员:20135223何伟钦 20135234马启扬 20135229吕松鸿 实验日期:2015.10.27—2015.11.3 实验时长:24 ...
- CuteBot智能小车
原因 近期,别人送了我一个CuteBot智能小车,拆开一看做工挺精致的,但是这东西是积木图形编程,显然不适合我这个年龄,所以打算给家里的小孩玩. 那么,你可能会问了,为什么要写这篇文章呢?答案当然是用 ...
- Arduino智能小车制作报告
Arduino智能小车制作报告 制作成员:20135224陈实 20135208贺邦 20135207王国伊 前提: Arduino,是一个开源的单板机控制器,采用了基于开放源代码的软硬件平台,构 ...
- Arduino智能小车实践学习报告
Arduino智能小车实践学习报告 参与人员: 20135316 王剑桥 20135312 吴汉彦 20135319 朱锂 一. 背景了解: 单片机:将中央处理单元CPU(进行运算.控制).随机存储器 ...
- Zybo智能小车识别图像中的文字
智能小车识别图像中的文字 [TOC] 运行平台 这次的内容是基于Xilinx公司的Zybo开发板以及其配套的Zrobot套件开发 Zybo上面的sd卡搭载了Ubuntu12.04LTS的linux版本 ...
- TurnipBit之DIY无线遥控智能小车
一.准备工作 TurnipBit 开发板 2块 TurnipBit 扩展板 1块 数据线 1条 智能小车器件 1套 电机驱动模块(L298N) 1个 在线可视化编程 点击进入 二.思路设计 2 ...
- [MicroPython]TPYBoard智能小车“飞奔的TPYBoard装甲一号”
智能小车作为现代的新发明,是以后的发展方向,他可以按照预先设定的模式在一个环境里自动的运作,不需要人为的管理,可应用于科学勘探等等的用途.智能小车能够实时显示时间.速度.里程,具有自动寻迹.寻光.避障 ...
- 树莓派4B安装64位Linux(不用显示器键盘鼠标)
入手了树莓派4B,我对它的定位是作为一个Docker实验环境,平时用到的镜像多为Java服务端常用的技术.以及自己作的Java应用镜像,因此宿主机需要64位操作系统,而树莓派官方操作系统只有32位的, ...
随机推荐
- buu学习记录(上)
前言:菜鸡误入buu,差点被打吐.不过学到了好多东西. 题目名称: (1)随便注 (2)高明的黑客 (3)CheckIn (4)Hack World (5)SSRF Me (6)piapiapia ( ...
- tensorflow 小记——如何对张量做任意行求和,得到新tensor(一种方法:列表生成式)
希望实现图片上的功能 import tensorflow as tfa = tf.range(10,dtype=float)b = aa = tf.reshape(a,[-1,1])a = tf.ti ...
- JavaSE01-概述
1.1 Java语言发展史 语言:人与人交流沟通的表达方式 计算机语言:人与计算机之间进行信息交流沟通的一种特殊语言 Java语言是美国Sun公司(Stanford University Networ ...
- css样式规则
在css样式规则中: 1.选择器用于指定CSS样式作用的HTML对象,花括号内是对该对象设置的具体样式. 2.属性和属性值以"键值对"的形式出现. 3.属性是对指定的对象设置的样式 ...
- react第六单元(react组件通信-父子组件通信-子父组件通信-跨级组件的传参方式-context方式的传参)
第六单元(react组件通信-父子组件通信-子父组件通信-跨级组件的传参方式-context方式的传参) #课程目标 1.梳理react组件之间的关系 2.掌握父子传值的方法 3.掌握子父传值的方法 ...
- vue第二单元(webpack的配置-学习webpack的常用配置)
第二单元(webpack的配置-学习webpack的常用配置) #课程目标 掌握webpack的常用配置 掌握如何根据实际的需求修改webpack的对应配置 了解webpack-dev-server的 ...
- 群晖DS218+部署GitLab
欢迎访问我的GitHub https://github.com/zq2599/blog_demos 内容:所有原创文章分类汇总及配套源码,涉及Java.Docker.Kubernetes.DevOPS ...
- 对着爬虫网页HTML学习Python正则表达式re
1.正则表达式初探 用比较经典的例子,查找一段文本中的手机号码.比如对于文本"我现在用的电话是188-8888-8888,之前那个186-6666-6666已经不用了",我们想获取 ...
- HCIP --- BGP综合实验
实验要求: 实验拓扑: 一.配置IP地址 L:代表环回地址(loop back 0) Y:代表业务网段的地址(loop back 1) 二.因为BGP基于IGP之上,给AS 2内配置OSPF 在R2上 ...
- H3C路由器配置示列一
说明: 如上图所示,192.168.0.0网段是总公司的网络,192.168.3.0和192.168.4.0网段是当前自己分公司的网络,且192.168.3.0是内网不能访问互联网,192.168.4 ...