机器学习基础——规则化(Regularization)
在机器学习中,我们一直期望学习一个泛化能力(generalization)强的函数只有泛化能力强的模型才能很好地适用于整个样本空间,才能在新的样本点上表现良好。
\]
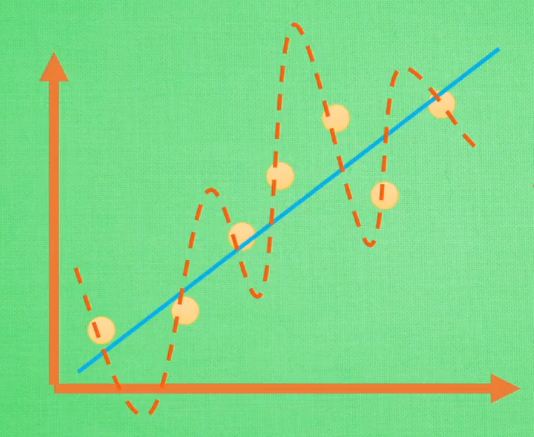
如上图,公式(1)完美地拟合了训练空间中所有的点,如果具备过拟合(overfiting)的能力,那么这个方程肯定是一个比较复杂的非线性函数。正是因为这里的 \(x^2\) 和 \(x^3\) 的参数 \(c\) 和 \(d\) 使得这条曲线可以弯来弯去去拟合训练样本空间中的点。但是我们希望的是模型可以学习到图面中这条蓝色的曲线,因为它能更有效地概括数据,所以我们希望 \(c\) 和 \(d\) 的值相对减小。虽然蓝色函数训练时对应的误差要比红色的大,但它概括起数据来要比蓝色的好。
训练集通常只是整个样本空间很小的一部分,在训练机器学习模型时,稍有不注意,就可能将训练集中样本的特性当作全体样本的共性,以偏概全,而造成过拟合,如何避免过拟合,是机器学习模型时亟待解决的绊脚石。
从问题的根源出发,解决过拟合无非两种途径:
- 使训练集能够尽可能全面的描述整个样本空间。因此又存在两种解决方案。①减少特征维数,特征维数减少了,样本空间的大小也随之减少了,现有数据集对样本空间的描述也就提高了。②增加训练样本数量,试图直接提升对样本空间的描述能力。
- 加入
规则化项。(规则化在有些文档中也称作正规化)
第一种方法的人力成本通常很大,所以在实际中,我们通常采用第二种方法提升模型的泛化能力。
规则化(Regularization)
首先回顾一下,在寻找模型最优参数时,我们通常对损失函数采用梯度下降(gradient descent)算法
\]
\]
\]
通过上述公式,我们将一步步走到损失函数的最低点(不考虑局部最小值和鞍点的情况),这是的 \(w\) 和 \(b\) 就是我们要找的最优参数。
我们可以看到,当我i们的损失函数只考虑最小化训练误差,希望找到的最优函数能够尽可能的拟合训练数据。但是正如我们所了解的,训练集不能代表整个样本空间,所以训练误差也不能代表测试误差,训练误差只是经验风险,我们不能过分依赖这个值。当我们的函数对训练集拟合特别好,训练误差特别小时,我们也就走进了一个极端——过拟合。
为了解决这个问题,研究人员提出了规则化(regularization)方法。通过给模型参数附加一些规则,也就是约束,防止模型过分拟合训练数据。规则化通过在原有损失函数的基础上加入规则化项实现。
此时,最优化的目标函数如下:
\]
其中,第一项对应于模型在训练集上的误差,第二项对应于规则化项。为了使得该目标函数最小,我们需要对训练误差和规则化项之间做出权衡。
那应该选择怎样的表达式作为规则化项呢?以下引用李航博士《统计学习方法》中的一些描述:
规则化是结构风险最小化策略的实现,是在经验风险最小化上加一个规则化项(regularizer)或惩罚项(penalty term)。规则化项一般是模型复杂度的单调递增函数,模型越复杂,规则化值就越大。比如,规则化项可以是模型参数向量的范数。
规则化符合奥卡姆剃刀(Occam‘s razor)原理。奥卡姆剃刀原理应用于模型选择时变为以下想法:在所有可能选择的模型中,能够很好地解释已知数据并且十分简单才是最好的模型,也就是应该选择的模型。从贝叶斯估计的角度来看,规则化项对应于模型的先验概率。可以假设复杂的模型有较大的先验概率,简单的模型有较小的先验概率。
我们通常采用L1-范数和L2-范数作为规则化项。
L-1范数
向量的L1-范数是向量的元素绝对值之和,即
\]
当采用L1-范数作为规则化项对参数进行约束时,我们的优化问题就可以写成一下形式:
s.t. \quad ||w||_1\leq C
\]
采用拉格朗日乘子法可以将约束条件合并到最优化函数中,即
\]
其中,\(λ\) 是与 \(C\) 一一对应的常数,用来权衡误差项和规则化项,\(λ\) 越大,约束越强。二维情况下分别将损失函数的等高线图和L1-范数规则化约束画在同一个坐标轴下,
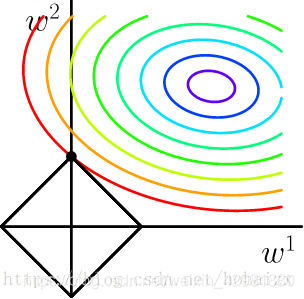
L1-范数约束对应于平面上一个正方形norm ball。不难看出,等高线与norm ball首次相交的地方可以使整个目标函数最小,即最优解。可以看到,L1-ball在和每个坐标轴相交的地方都有一个“角”出现,大部分时候等高线都会与norm ball在角的地方相交。这样部分参数值被置为0,相当于该参数对应的特征将不再发挥作用,实现了特征选择,增加了模型的可解释性。关于L1-范数规则化,可以解释如下:训练出来的参数代表权重,反映了特征的重要程度,比如 $y=20x_1+5x_2+3$ 中特征 $x_1$ 明显比 $x_2$ 更重要,因为 $x_1$ 的变动相较于 $x_2$ 的变动会给 $y$ 带来更大的变化。在人工选取的特征中,往往会存在一些冗余特征或者无用特征,L1-范数规则化将这些特征的权重置为0,实现了特征选择,同样也简化了模型。
L1-范数在 $x=0$ 处存在拐点,所以不能直接求得解析解,需要用次梯度方法处理不可导的凸函数。
L2-范数
除了L1-范数,还有一种广泛使用的规则化范数:L2-范数。向量的L2-范数是向量的模长,即
\]
当采用L2-范数作为规则化项对参数进行约束时,我们的优化问题可以写成以下形式:
s.t. \quad ||w||_2 \leq C
\]
同样可以将约束条件合并到最优化函数中,得到如下函数
\]
也将损失函数的等高线图和L2-范数规则化约束画在同一坐标轴下,
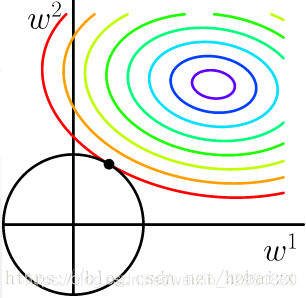
L2-范数约束对应于平面上一个圆形norm ball。等高线与norm ball首次相交的地方就是最优解。与L1-范数不同,L2-范数使得每一个 $w$ 都很小,都接近于0,但不会等于0,L2-范数规则化仍然试图使用每一维特征。对于L2-范数规则化可以解释如下:L2-范数规则化项将参数限制在一个较小的范围,参数越小,曲面越光滑,因而不会出现很小区间内,弯度很大的情。当 $x$ 出现一个较大的变化时, $y$ 也只会变化一点点,模型因此更加稳定,也就更加generalization。
加入L2-范数规则化项后,目标函数扩展为如下形式:
$$
w^*,b^*=arg\ min_{w,b}\sum_{i=1}^m(y^{(i)}-(w^Tx^{(i)}+b)^2 + λ\sum^n_{j=1}w^2_j\tag{7}
$$
$$
\frac{∂L}{∂w}=\sum^m_{i=1}2[(y^{(i)}-(w^Tx^{(i)}+b)(-x^{(i)})+λw]\tag{8}
$$
$$
\frac{∂L}{∂b}=\sum^m_{i=1}2[(y^{(i)}-(w^Tx^{(i)}+b)(-x^{(i)})(-1)λw]\tag{9}
$$
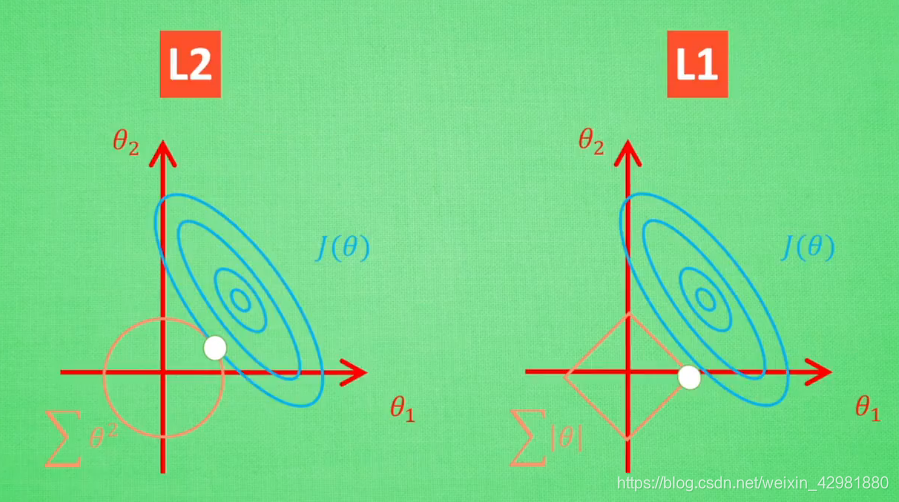
L1-范数和L2-范数的比较
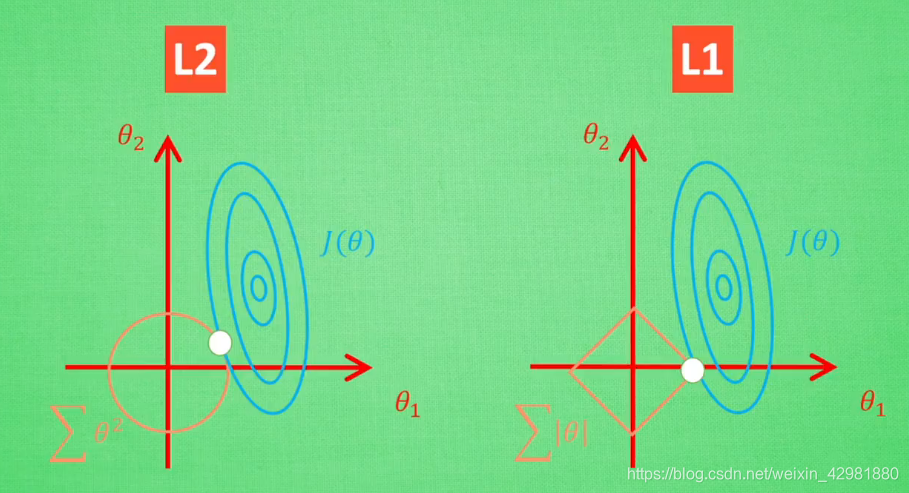
假设现在之后两个参数 $θ_1$ 和 $θ_2$ 要学。 如图,其中蓝色圆心是误差最小的地方,每条蓝线上的误差都是一样,正规化的方程就是在黄线上产生的额外误差,黄线上的额外误差的值也都一样,所以在黄线和蓝线交点的位置能够使两个误差的和最小,这也是 $θ_1$ 和 $θ_2$ 规则化后的解。
值得一提的是,使用L1-范数的方法很有可能只有 $θ_1$ 的特征被保留,所以很多人采用L1-范数规则化提取对结果`贡献最大`的特征。
但是L1的解并不是很稳定,比如批数据训练,每一次批数据都会有稍稍不同的误差曲线。L2对于这种变化,交点的移动并不会特别明显,而L1的交点的很可能会跳到很多不同的地方,如下图。因为这些地方的总误差都差不多,侧面说明了L1的解不稳定。
参考
[1] https://blog.csdn.net/hohaizx/article/details/80973738.
[2] https://www.bilibili.com/video/BV1Tx411j7tJ?from=search&seid=5329920308199944586.
机器学习基础——规则化(Regularization)的更多相关文章
- 最优化方法:范数和规则化regularization
http://blog.csdn.net/pipisorry/article/details/52108040 范数规则化 机器学习中出现的非常频繁的问题有:过拟合与规则化.先简单的来理解下常用的L0 ...
- 机器学习中的范数规则化之L0、L1与L2范数
今天看到一篇讲机器学习范数规则化的文章,讲得特别好,记录学习一下.原博客地址(http://blog.csdn.net/zouxy09). 今天我们聊聊机器学习中出现的非常频繁的问题:过拟合与规则化. ...
- 转:机器学习 规则化和模型选择(Regularization and model selection)
规则化和模型选择(Regularization and model selection) 转:http://www.cnblogs.com/jerrylead/archive/2011/03/27/1 ...
- paper 126:[转载] 机器学习中的范数规则化之(一)L0、L1与L2范数
机器学习中的范数规则化之(一)L0.L1与L2范数 zouxy09@qq.com http://blog.csdn.net/zouxy09 今天我们聊聊机器学习中出现的非常频繁的问题:过拟合与规则化. ...
- 机器学习中的范数规则化之(一)L0、L1与L2范数(转)
http://blog.csdn.net/zouxy09/article/details/24971995 机器学习中的范数规则化之(一)L0.L1与L2范数 zouxy09@qq.com http: ...
- 机器学习中的范数规则化之(一)L0、L1与L2范数 非常好,必看
机器学习中的范数规则化之(一)L0.L1与L2范数 zouxy09@qq.com http://blog.csdn.net/zouxy09 今天我们聊聊机器学习中出现的非常频繁的问题:过拟合与规则化. ...
- 机器学习中的范数规则化-L0,L1和L2范式(转载)
机器学习中的范数规则化之(一)L0.L1与L2范数 zouxy09@qq.com http://blog.csdn.net/zouxy09 今天我们聊聊机器学习中出现的非常频繁的问题:过拟合与规则化. ...
- 机器学习中的规则化范数(L0, L1, L2, 核范数)
目录: 一.L0,L1范数 二.L2范数 三.核范数 今天我们聊聊机器学习中出现的非常频繁的问题:过拟合与规则化.我们先简单的来理解下常用的L0.L1.L2和核范数规则化.最后聊下规则化项参数的选择问 ...
- 机器学习中的范数规则化 L0、L1与L2范数 核范数与规则项参数选择
http://blog.csdn.net/zouxy09/article/details/24971995 机器学习中的范数规则化之(一)L0.L1与L2范数 zouxy09@qq.com http: ...
随机推荐
- [译] 使用 Espresso 隔离测试视图
原文地址:Testing Views in Isolation with Espresso 原文作者:Ataul Munim 译文出自:掘金翻译计划 译者:yazhi1992 校对者:lovexiao ...
- java中将从数据库查询的信息输出到excel文件中
package com.cn.peitest.excel; import java.io.File; import java.lang.reflect.Field; import java.util. ...
- 关于java方法重写
1.子类的方法与父类中的方法有相同的返回类型,相同的方法名称.相同的参数列表 2.子类方法的访问级别不能低于父类方法的访问级别 3.子类方法抛出的异常范围不能大于父类中方法抛出的异常范围
- Cocos Creator 新资源管理系统剖析
目录 1.资源与构建 1.1 creator资源文件基础 1.2 资源构建 1.2.1 图片.图集.自动图集 1.2.2 Prefab与场景 1.2.3 资源文件合并规则 2. 理解与使用 Asset ...
- .Net微服务实战之负载均衡(下)
系列文章 .Net微服务实战之技术选型篇 .Net微服务实战之技术架构分层篇 .Net微服务实战之DevOps篇 .Net微服务实战之负载均衡(上) .Net微服务实战之CI/CD .Net微服务实战 ...
- 如何将项目推到github上面
1.先查看是否安装git. 2.如果没有安装git ,下载之后别忘了配置环境变量.(右击此电脑 --属性--高级系统设置--环境变量--系统变量中的path) 3.推代码 查看状态(可查可不查) gi ...
- 九个最容易出错的 Hive sql 详解及使用注意事项
阅读本文小建议:本文适合细嚼慢咽,不要一目十行,不然会错过很多有价值的细节. 文章首发于公众号:五分钟学大数据 前言 在进行数仓搭建和数据分析时最常用的就是 sql,其语法简洁明了,易于理解,目前大数 ...
- SparkSQL学习进度9-SQL实战案例
Spark SQL 基本操作 将下列 JSON 格式数据复制到 Linux 系统中,并保存命名为 employee.json. { "id":1 , "name&quo ...
- C#处理医学图像(二):基于Hessian矩阵的医学图像增强与窗宽窗位
根据本系列教程文章上一篇说到,在完成C++和Opencv对Hessian矩阵滤波算法的实现和封装后, 再由C#调用C++ 的DLL,(参考:C#处理医学图像(一):基于Hessian矩阵的血管肺纹理骨 ...
- Linux tar压缩和解压
经常会忘记 tar 压缩和解压命令的使用,故记下来. 1. 打包压缩 tar -zcvf pack.tar.gz pack/ #打包压缩为一个.gz格式的压缩包 tar -jcvf pack.tar. ...