【计算几何】二维凸包——Graham's Scan法
#include<algorithm>
#include<iostream>
#include<cstring>
#include<cstdio>
#include<cmath>
using namespace std;
const int maxn= ; struct _point
{
double x, y;
_point (double _x= , double _y= )
{
x= _x;
y= _y;
}
/*friend: 修饰词:友元函数*/
friend inline _point operator + (const _point &a, const _point &b)
{
return _point(a.x+ b.x, a.y+ b.y );
}
friend inline _point operator - (const _point &a, const _point &b)
{
return _point(a.x- b.x, a.y- b.y );
}
friend inline double operator * (const _point &a, const _point &b)
{
/*叉乘,求叉积*/
/*x1y2- x2y1*/
return (a.x* b.y)- (b.x* a.y);
}
};
_point point[maxn];
_point In_Bag[maxn]; double getDis(_point a,_point b)
{
return sqrt((a.x-b.x)*(a.x-b.x)+(a.y-b.y)*(a.y-b.y));
}
bool cmpx (const _point &a,const _point &b)
{
/*极角按逆时针排序(顺时针的点排在前面便是逆时针排序)*/
/*叉积等于0,两向量平行*/
double k= (a- point[])* (b- point[]);
return == k? (getDis(a, point[])- getDis(b, point[])<= ): k< ;
} int cnt; //凸包集里点的个数;
void Graham_Scan(int n)
{
cnt= -;
In_Bag[++ cnt]= point[];
for(int i= ; i< n; i ++)
{
while(cnt&& (point[i]- In_Bag[cnt])* (In_Bag[cnt]-In_Bag[cnt- ])< )
{
/*当In_Bag中至少有基点和另一点时(cnt>= 1)*/
/*逆时针扫描时,如果向量{pn- 1, pn}与{pn, pn+ 1}的叉积为负,则将上一点删除*/
/*顺时针扫描判断是否为正*/
-- cnt;
}
In_Bag[++ cnt]= point[i];
}
} int main()
{
int n;
double xx, yy;
while (~ scanf("%d", &n))
{
for (int i= ; i< n; i ++)
{
scanf("%lf %lf", &xx, &yy);
if (i)
{
if (yy< point[].y|| (yy== point[].y&& xx< point[].x))
{
double tmp= yy;
yy= point[].y;
point[].y= tmp;
tmp= xx;
xx= point[].x;
point[].x= tmp;
}
}
point[i].x= xx;
point[i].y= yy;
}
sort(point+ , point+ n, cmpx);
Graham_Scan(n); /*求凸包周长*/
double Dis= ;
// cout << "********************" << endl;
// for (int i= 0; i<= cnt; i ++)
// {
// cout << In_Bag[i].x << " " << In_Bag[i].y << endl;
// }
for (int i= ; i<= cnt; i ++)
{
Dis+= getDis(In_Bag[i], In_Bag[(i+ )% (cnt+ )]);
}
printf("%.2f\n", Dis);
}
return ;
}
简化后模板
凸包
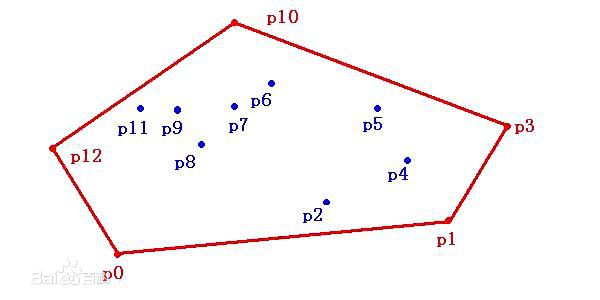
点集Q的凸包(convex hull)是指一个最小凸多边形,满足Q中的点或者在多边形边上或者在其内。右图中由红色线段表示的多边形就是点集Q={p0,p1,...p12}的凸包。
一组平面上的点,求一个包含所有点的最小的凸多边形,这就是凸包问题了。这可以形象地想成这样:在地上放置一些不可移动的木桩,用一根绳子把他们尽量紧地圈起来,并且为凸边形,这就是凸包了。
数学定义:设S为欧几里得空间Rn的任意子集。包含S的最小凸集称为S的凸包,记作conv(S)。
【百度百科】https://baike.baidu.com/item/%E5%87%B8%E5%8C%85/179150?fr=aladdin
以下内容基本照搬。
凸包最常用的凸包算法是Graham扫描法和Jarvis步进法
①Graham's Scan法
这个算法是由数学大师葛立恒(Graham)发明的。
⒈ 在所有点中选取y坐标最小的一点H,当作基点。如果存在多个点的y坐标都为最小值,则选取x坐标最小的一点。坐标相同的点应排除。
2.然后按照其它各点p和基点构成的向量<H,p>;与x轴的夹角进行排序,夹角由大至小进行顺时针扫描,反之则进行逆时针扫描。实现中无需求得夹角,只需根据余弦定理求出向量夹角的余弦值即可。
以下图为例,基点为H,根据夹角由小至大排序后依次为H,K,C,D,L,F,G,E,I,B,A,J。下面进行逆时针扫描。
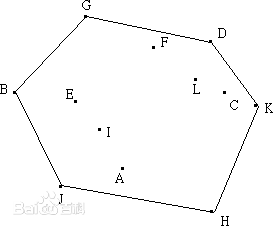
3.线段<H,K>;一定在凸包上,接着加入C。假设线段<K,C>;也在凸包上,因为就H,K,C三点而言,它们的凸包就是由此三点所组成。但是接下来加入D时会发现,线段<K,D>;才会在凸包上,所以将线段<K,C>;排除,C点不可能是凸包。即当加入一点时,必须考虑到前面的线段是否在凸包上。从基点开始,凸包上每条相临的线段的旋转方向应该一致,并与扫描的方向相反。如果发现新加的点使得新线段与上线段的旋转方向发生变化,则可判定上一点必然不在凸包上。实现时可用向量叉积进行判断,设新加入的点为Pn+1,上一点为Pn,再上一点为Pn-1 。顺时针扫描时,如果向量{Pn-1 ,Pn}与{Pn,Pn+1}的叉积为正(逆时针扫描判断是否为负),则将上一点删除。删除过程需要回溯,将之前所有叉积符号相反的点都删除,然后将新点加入凸包。
4.在上图中,加入K点时,由于线段<H,C>要旋转到<H,K>的角度,为顺时针旋转,所以C点不在凸包上,应该删除,保留K点。接着加入D点,由于线段<K,D>要旋转到<H,K>的角度,为逆时针旋转,故D点保留。按照上述步骤进行扫描,直到点集中所有的点都遍历完成,即得到凸包。
向量的叉积
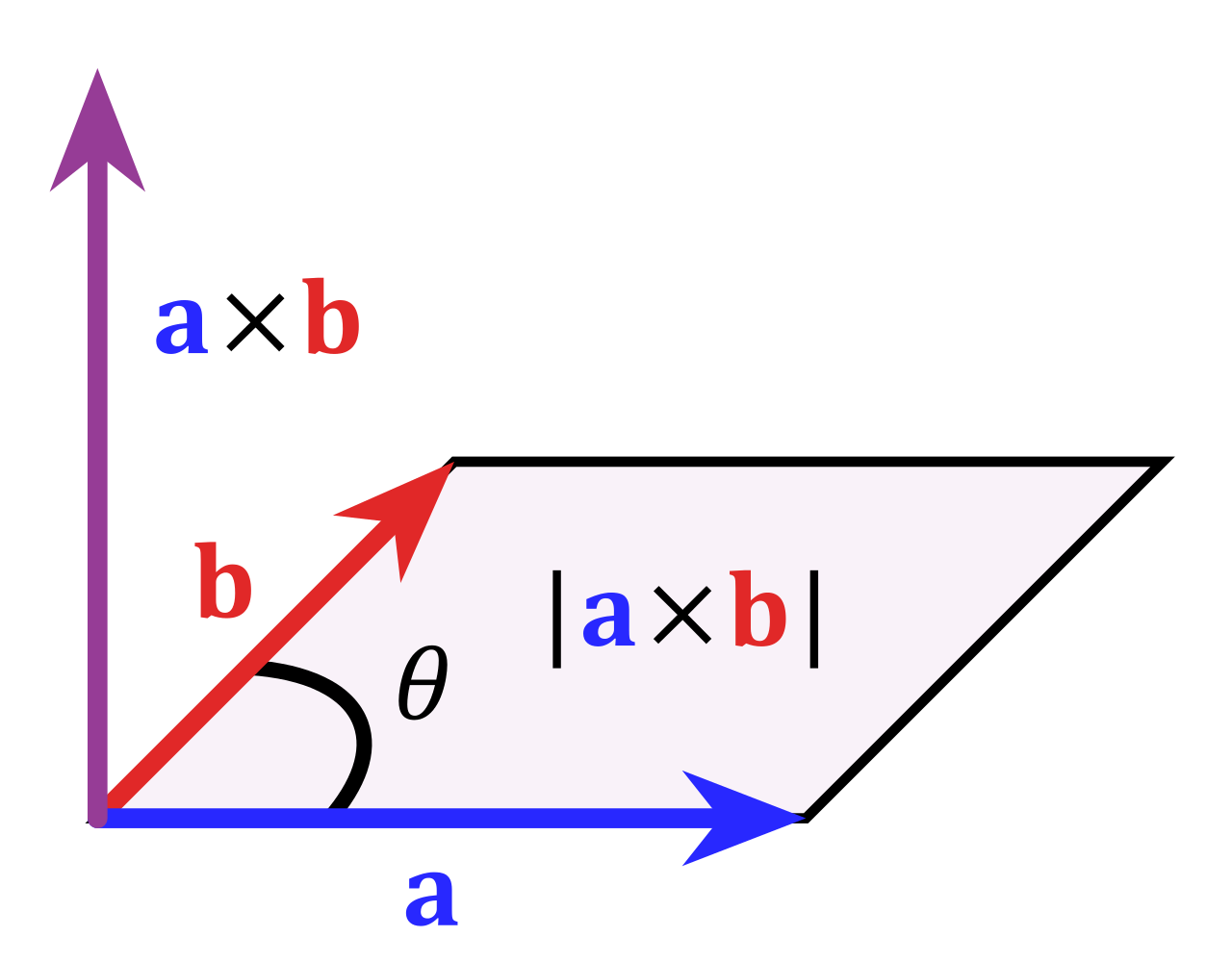
向量积,数学中又称外积、叉积,物理中称矢积、叉乘,是一种在向量空间中向量的二元运算。与点积不同,它的运算结果是一个向量而不是一个标量。并且两个向量的叉积与这两个向量和垂直。
两个向量a和b的叉积写作a×b(有时也被写成a∧b,避免和字母x混淆)。
向量积|c|= |a×b|= |a||b|sin<a,b>;c的方向遵守右手定则。c是垂直a、b所在平面,且以|b|·sinθ为高、|a|为底的平行四边形的面积。
c = a×b=(x1y2- x2y1);
【图源维基百科】
维基百科中向量积解释:https://en.wikipedia.org/wiki/Cross_product
下面放一个例子吧;
【洛谷】P2742 【模板】二维凸包 / [USACO5.1]圈奶牛Fencing the Cows
题目描述
农夫约翰想要建造一个围栏用来围住他的奶牛,可是他资金匮乏。他建造的围栏必须包括他的奶牛喜欢吃草的所有地点。对于给出的这些地点的坐标,计算最短的能够围住这些点的围栏的长度。
输入格式:
输入数据的第一行包括一个整数 N。N(0 <= N <= 10,000)表示农夫约翰想要围住的放牧点的数目。接下来 N 行,每行由两个实数组成,Xi 和 Yi,对应平面上的放牧点坐标(-1,000,000 <= Xi,Yi <= 1,000,000)。数字用小数表示。
输出格式:
输出必须包括一个实数,表示必须的围栏的长度。答案保留两位小数。
这是一道二维凸包模板题。我按上面的步骤一点点拆分一下。
首先两个pair数组,分别存放所有的点和位于凸包上的点。
const int maxn = ;
typedef pair<double, double> _pair; _pair point[maxn];
_pair In_Bag[maxn];
之所以用pair是因为二维坐标刚好两个点,有便宜不占嘿嘿嘿。
然后一些基本的计算几何公式;
计算两点间距离。
double Get_Dis (_pair point1, _pair point2)
{
//计算两点间距离
return sqrt(((point1.first- point2.first)* (point1.first- point2.first) )
+ ((point1.second- point2.second)* (point1.second- point2.second) ) );
}
计算叉积。
double Get_axb (_pair a_point1, _pair a_point2, _pair b_point1, _pair b_point2)
{
//计算两条向量的叉积
//向量a= a_point1 --> a_point2= a_point2- a_point1;
//向量b= b_point1 --> b_point2= b_point2- b_point1;
//叉积axb= (a.x* b.y)- (b.x* a.y);
//a.x= a_point2.x- a_point1.x; a.y= a_point2.y- a_point1.y;
return (((a_point2.first- a_point1.first)* (b_point2.second- b_point1.second) )
- ((b_point2.first- b_point1.first)* (a_point2.second- a_point1.second) ) );
}
计算向量a和x轴所成角的余弦值。
double Get_Cos (_pair point1, _pair point2)
{
//计算向量a(point1-->point2) 的余弦值;
point2.first-= point1.first; //把point1看作坐标原点(0, 0);
point2.second-= point1.second; //则point2的坐标为(P2.x- P1.x, P2.y- P1.y);
point1.first= ;
point1.second= ;
_pair point3; //在X轴上找一点P3,做直角三角形;
point3.first= point2.first; //P3.x= P2.x;
point3.second= ; //P3.y= P1.y= 0;
double Dis_P1_P2= Get_Dis(point1, point2); //计算直角三角形的斜边长,即P1P2之间的距离;
return point3.first/ Dis_P1_P2; //邻边/ 斜边;
}
确定了基点后,围绕基点对其余点排序(按余弦值),判断函数cmp。
bool cmpx_1 (_pair a, _pair b)
{
//小于运算(按与基点P0所成向量的余弦值大小,余弦值越大越优先;cosx在[0,Pi]内从1到-1,减函数;
//排序后,按逆时针方向遍历点集;
_pair tmp = point[]; //基点;
double Cos_a = Get_Cos(tmp, a); //求出a,b的余弦值;
double Cos_b = Get_Cos(tmp, b);
return Cos_a- Cos_b> ; //余弦值越大越优先(越大逆时针遍历越靠前);
}
主函数中,在输入时先确定基点point[0],然后对其余点按逆时针顺序排序。
for (int i = ; i < n; i ++)
{
cin >> x >> y;
if (i )
{
if (y< point[].second|| (y== point[].second&& x< point[].first) )
{
double tmp= y;
y= point[].second;
point[].second= tmp;
tmp= x;
x= point[].first;
point[].first= tmp;
}
}
point[i].first= x;
point[i].second= y;
}
sort(point+ , point+ n, cmpx_1);
对排序后的点集,判断是否加入In_Bag[]。
int cnt= -; //cnt -->In_Bag[]中最后一位元素的数组下标;
In_Bag[++ cnt]= point[];
for (int i = ; i < n; i ++) //从point[1]开始;
{
while (cnt&& Get_axb(In_Bag[cnt- ], In_Bag[cnt], In_Bag[cnt], point[i])< )
{
//当In_Bag中至少有基点和另一点时(cnt>= 1时);
//逆时针扫描时,如果向量{Pn-1, Pn}与{Pn, Pn+1}的叉积为负,则将上一点删除;
//(顺时针扫描判断是否为正)
-- cnt;
}
In_Bag[++ cnt]= point[i];
}
最后把所有点首尾相连,算出距离和即可。
double Dis = ;
for (int i= ; i<= cnt; i ++)
{
Dis+= Get_Dis(In_Bag[i], In_Bag[(i+ )% (cnt+ )]);
}
printf("%.2f\n", Dis);
谢谢各位能看到最后嘿嘿。
完整的代码在这里。
https://www.cnblogs.com/Amaris-diana/p/10519865.html
【计算几何】二维凸包——Graham's Scan法的更多相关文章
- 计算几何 二维凸包问题 Andrew算法
凸包:把给定点包围在内部的.面积最小的凸多边形. Andrew算法是Graham算法的变种,速度更快稳定性也更好. 首先把全部点排序.依照第一keywordx第二keywordy从小到大排序,删除反复 ...
- 二维凸包 Graham扫描算法
题目链接: http://poj.org/problem?id=1113 求下列点的凸包 求得凸包如下: Graham扫描算法: 找出最左下的点,设为一号点,将其它点对一号点连线,按照与x轴的夹角大小 ...
- 使用Graham扫描法求二维凸包的一个程序
#include <iostream> #include <cstring> #include <cstdlib> #include <cmath> # ...
- Luogu P2742 模板-二维凸包
Luogu P2742 模板-二维凸包 之前写的实在是太蠢了.于是重新写了一个. 用 \(Graham\) 算法求凸包. 注意两个向量 \(a\times b>0\) 的意义是 \(b\) 在 ...
- luogu P2742 【模板】二维凸包 / [USACO5.1]圈奶牛Fencing the Cows
题解: 二维凸包裸题 按照x坐标为第一关键字,y坐标为第二关键字排序 然后相邻判断叉积用单调队列搞过去 正反都做一次就好了 代码: #include <bits/stdc++.h> usi ...
- 【洛谷 P2742】【模板】二维凸包
题目链接 二维凸包板子..有时间会补总结的. #include <cstdio> #include <cmath> #include <algorithm> usi ...
- poj 2079 Triangle (二维凸包旋转卡壳)
Triangle Time Limit: 3000MS Memory Limit: 30000KB 64bit IO Format: %I64d & %I64u Submit Stat ...
- poj 2187 Beauty Contest(二维凸包旋转卡壳)
D - Beauty Contest Time Limit:3000MS Memory Limit:65536KB 64bit IO Format:%I64d & %I64u ...
- UVA 10652 Board Wrapping(二维凸包)
传送门 刘汝佳<算法竞赛入门经典>P272例题6包装木板 题意:有n块矩形木板,你的任务是用一个面积尽量小的凸多边形把它们抱起来,并计算出木板占整个包装面积的百分比. 输入:t组数据,每组 ...
随机推荐
- HDU 5000 2014 ACM/ICPC Asia Regional Anshan Online DP
Clone Time Limit : 2000/1000ms (Java/Other) Memory Limit : 65536/65536K (Java/Other) Total Submiss ...
- bzoj5311: 贞鱼
还是年轻啊算的时候少乘一个4000被卡二分上界了...%%%%bright教我超级快速读D飞bzoj垃圾卡常数据 我们容易写出这样的DP方程:f[i][j]=f[k][j-1]+val(k+1,j) ...
- 获取view宽高
在oncreate()中利用view.getWidth()或是view.getHeiht()来获取view的宽和高,看似没有问题,其实他们去得值是0,并不是你想要的结果? 这是为什么呢? 在调用onc ...
- Dinic(模板 再错是不可能的 这辈子都不可能了)
#include<iostream> #include<cstdio> #include<cmath> #include<cstring> #inclu ...
- [Codeforces 639B] Bear and Forgotten Tree 3
[题目链接] https://codeforces.com/problemset/problem/639/B [算法] 当d > n - 1或h > n - 1时 , 无解 当2h < ...
- bzoj1791
1791: [Ioi2008]Island 岛屿 Time Limit: 20 Sec Memory Limit: 162 MBSubmit: 1680 Solved: 369[Submit][S ...
- 2-4 Vue中的属性绑定和双向数据绑定
<!DOCTYPE html> <html lang="en"> <head> <meta charset="UTF-8&quo ...
- [App Store Connect帮助]四、添加 App 图标、App 预览和屏幕快照(3)上传 App 预览和屏幕快照
请上传至多三个 App 预览和至多十张屏幕快照.如果您的 App 在不同设备尺寸和本地化内容间都相同,仅提供所要求的最高分辨率的屏幕快照即可. 对于 iPhone,必须提供用于 5.5 英寸设备(iP ...
- c语言小项目-使用mysql数据库的图书管理系统
VS2013通过MySQL方式连接到MySQL MySQL官网上C++的API有两个.一个是很成熟的mysql++,另一个是MySQL Connector/C++,近两年才出的,模仿JDBC做的,封装 ...
- 【转】数据倾斜是多么痛?spark作业/面试/调优必备秘籍
原博文出自于: http://sanwen.net/a/gqkotbo.html 感谢! 来源:数盟 调优概述 有的时候,我们可能会遇到大数据计算中一个最棘手的问题——数据倾斜,此时Spark作业的性 ...