周博磊老师强化学习纲领笔记第二课:MDP,Policy Iteration与Value Iteration
gym环境:FrozenLake-v0:http://gym.openai.com/envs/FrozenLake-v0/
代码来自:周博磊老师的GitHub:https://github.com/cuhkrlcourse/RLexample/tree/master/MDP
环境如下:
SFFF (S: starting point, safe)
FHFH (F: frozen surface, safe)
FFFH (H: hole, fall to your doom)
HFFG (G: goal, where the frisbee is located)
- 环境解释:冰封湖问题,智能体控制角色在网格世界中的移动。网格中的某些冰面是可行走的,而某些冰面会导致主体掉入水中。另外,智能体的移动方向是不确定的,并且仅部分取决于所选方向。(也就是如果你想向上走,你选择的动作是向上走,但是实际不一定向上走,可能会发生偏移,向左,或向右,三个方向的概率是等价的,也就是都是0.3333)代理商因找到通往目标砖的可步行路径而获得奖励。
# env.nA, 表示每个可以选择的动作的个数为4,动作空间
# env.nS, 表示状态的总数为16,状态空间
# env.P[state][a], 表示在状态state下执行动作a,返回的是prob概率, next_state下一个状态,reward奖励, done是否结束
Policy Iteration:
目标:寻找一个最后策略:\(\pi\)
解决方法:不断的迭代Bellman expectation backup(下面的公式5)
Policy Iteration algorithm:
At each iteration t+1
update \(v_{t+1}(s)\) from \(v_t(s')\) for all states \(s \in S\) where \(s'\) is a successor states of s
\(v_{t+1}(s)=\sum_{a \in A}\pi(a|s)[R(s,a)+\gamma\sum_{s'\in S}P(s'|s,a)v_t(s')]\)
Convergence: \(v_1\to v_2\to ...\to v^\pi\)
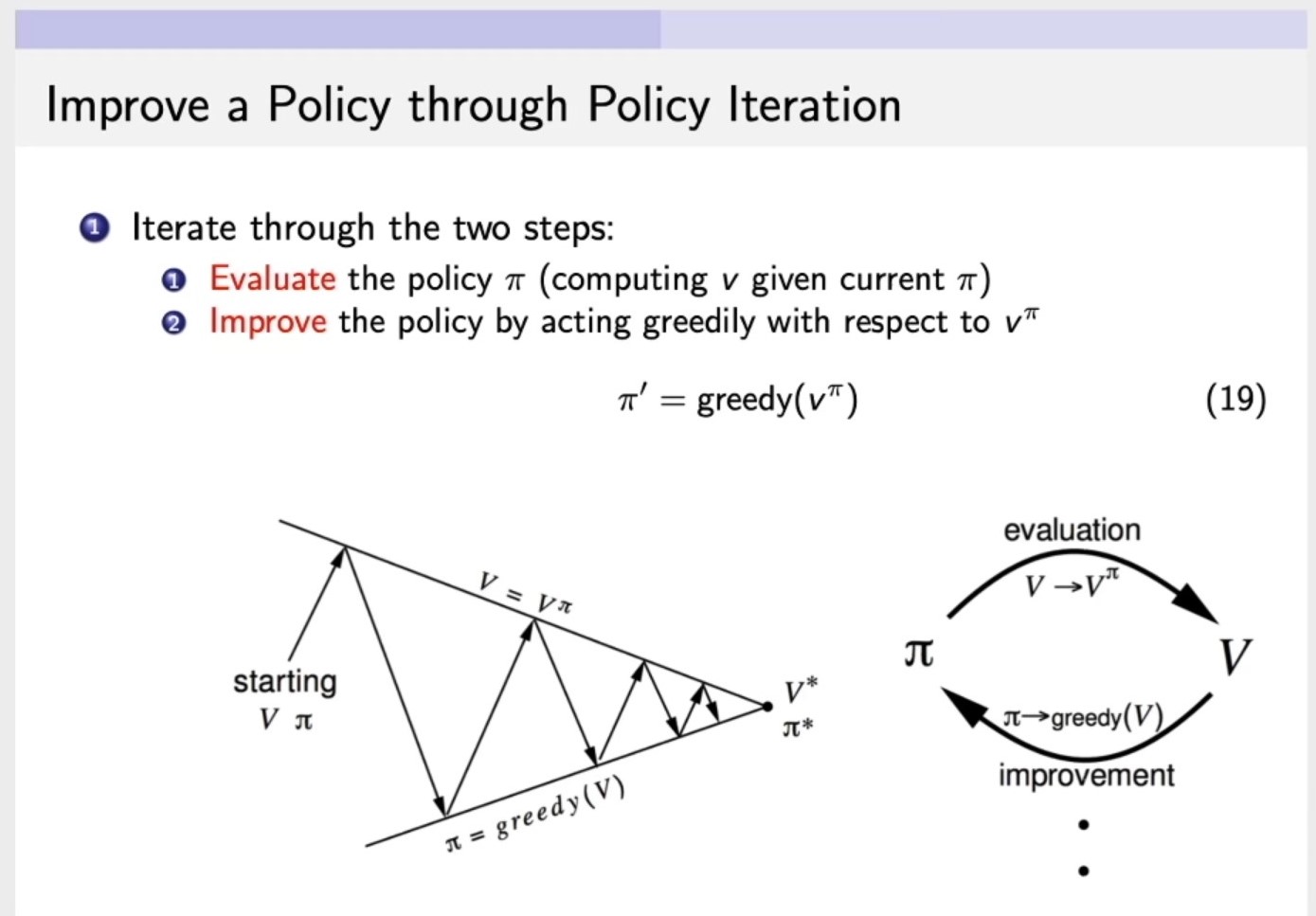
Iterate through the two steps:
Evaluatethe policy \(\pi\) (computing \(v\) given current \(\pi\)),第一步:计算v函数,输入,环境,策略以及衰减因子,来计算这个策略的价值。Improvethe policy by acting greedily wirh respect to \(v^\pi\),第二步:改进策略policy,通过对 \(v^\pi\) (第一步通过\(\pi\)求解出来的\(v\))采取贪心的算法,来改进策略policy。
Policy Iteration:
"""
Solving FrozenLake environment using Policy-Iteration.
Adapted by Bolei Zhou for IERG6130. Originally from Moustafa Alzantot (malzantot@ucla.edu)
"""
import numpy as np
import gym
RENDER=False
GAMMA=1.0
# 计算策略policy跑一个回合的奖励:输入环境,策略以及衰减因子,跑一个回合,返回奖励值
def run_episode(env, policy, gamma = GAMMA, render = False):
""" Runs an episode and return the total reward """
obs = env.reset()
# 重置环境
total_reward = 0
step_idx = 0
while True:
if render:
env.render()
# 如果想看环境渲染的话,就设置输入的render为True,render默认为False
obs, reward, done , _ = env.step(int(policy[obs]))
total_reward += (gamma ** step_idx * reward)
step_idx += 1
if done:
break
return total_reward,step_idx
# 计算策略policy的平均奖励
def evaluate_policy(env, policy, gamma = GAMMA, n = 100):
scores = [run_episode(env, policy, gamma, render=RENDER) for _ in range(n)]
return np.mean(scores)
# 第一步:计算v函数,输入,环境,策略以及衰减因子,来计算这个策略的价值
def compute_policy_v(env, policy, gamma=GAMMA):
""" Iteratively evaluate the value-function under policy.
Alternatively, we could formulate a set of linear equations in iterms of v[s]
and solve them to find the value function.
"""
v = np.zeros(env.env.nS)
eps = 1e-10
# 将精度收敛到eps的时候,就停止更新
while True:
prev_v = np.copy(v)
for s in range(env.env.nS):
policy_a = policy[s]
v[s] = sum([p * (r + gamma * prev_v[s_]) for p, s_, r, _ in env.env.P[s][policy_a]])
if (np.sum((np.fabs(prev_v - v))) <= eps):
# value converged
break
return v
# 第二步:改进策略policy,通过对old_policy_v采取贪心的算法,来改进策略policy
def extract_policy(v, gamma = GAMMA):
""" Extract the policy given a value-function """
policy = np.zeros(env.env.nS)
for s in range(env.env.nS):
q_sa = np.zeros(env.env.nA)
for a in range(env.env.nA):
q_sa[a] = sum([p * (r + gamma * v[s_]) for p, s_, r, _ in env.env.P[s][a]])
policy[s] = np.argmax(q_sa)
return policy
# policy_iteration的主要算法
def policy_iteration(env, gamma = GAMMA):
""" Policy-Iteration algorithm """
policy = np.random.choice(env.env.nA, size=(env.env.nS)) # initialize a random policy
max_iterations = 200000
gamma = GAMMA
for i in range(max_iterations):
old_policy_v = compute_policy_v(env, policy, gamma)
# 第一步:计算v函数,输入,环境,策略以及衰减因子,来计算这个策略的价值
new_policy = extract_policy(old_policy_v, gamma)
# 第二步:改进策略policy,通过对old_policy_v采取贪心的算法,来改进策略policy
if (np.all(policy == new_policy)):
# 如果policy已经不在发生改变了,也就是收敛了,无法提升了
print ('Policy-Iteration converged at step %d.' %(i+1))
break
policy = new_policy
return policy
if __name__ == '__main__':
env_name = 'FrozenLake-v0' # 'FrozenLake4x4-v0'
env = gym.make(env_name)
optimal_policy = policy_iteration(env, gamma = GAMMA)
scores = evaluate_policy(env, optimal_policy, gamma = GAMMA)
print('Average scores = ', np.mean(scores))
print(optimal_policy)
total,step=run_episode(env,optimal_policy,GAMMA,True)
print("一共走了:",step)
Value Iteration:
目标:寻找一个最后策略:\(\pi\)
解决方法:不断的迭代Bellman optimality backup(下面的公式5)
Value Iteration algorithm:
initialize \(k =1\) and \(v_0(s)=0\) for all states \(s\)
For \(k=1\) : \(H\)
for each state \(s\)
\(q_{k+1}(s,a)=R(s,a)+\gamma\sum_{s' \in S}P(s'|s,a)v_k(s')\)
\(v_{k+1}(s)=max_aq_{k+1}(s,a)\)
\(k \leftarrow k+1\)
To retrieve the optimal policy after the value iteration:
\(\pi(s)=argmax_a[R(s,a)+\gamma\sum_{s' \in S}P(s'|s,a)v_{k+1}(s')]\)
Value Iteration:
"""
Solving FrozenLake environment using Value-Itertion.
Updated 17 Aug 2020
"""
import numpy as np
import gym
from gym import wrappers
from gym.envs.registration import register
def run_episode(env, policy, gamma = 1.0, render = False):
""" Evaluates policy by using it to run an episode and finding its
total reward.
args:
env: gym environment.
policy: the policy to be used.
gamma: discount factor.
render: boolean to turn rendering on/off.
returns:
total reward: real value of the total reward recieved by agent under policy.
"""
obs = env.reset()
total_reward = 0
step_idx = 0
while True:
if render:
env.render()
obs, reward, done , _ = env.step(int(policy[obs]))
total_reward += (gamma ** step_idx * reward)
step_idx += 1
if done:
break
return total_reward
def evaluate_policy(env, policy, gamma = 1.0, n = 100):
""" Evaluates a policy by running it n times.
returns:
average total reward
"""
scores = [
run_episode(env, policy, gamma = gamma, render = False)
for _ in range(n)]
return np.mean(scores)
def extract_policy(v, gamma = 1.0):
""" Extract the policy given a value-function """
policy = np.zeros(env.env.nS)
for s in range(env.env.nS):
q_sa = np.zeros(env.action_space.n)
for a in range(env.action_space.n):
for next_sr in env.env.P[s][a]:
# next_sr is a tuple of (probability, next state, reward, done)
p, s_, r, _ = next_sr
q_sa[a] += (p * (r + gamma * v[s_]))
policy[s] = np.argmax(q_sa)
return policy
def value_iteration(env, gamma = 1.0):
""" Value-iteration algorithm """
v = np.zeros(env.env.nS) # initialize value-function
max_iterations = 100000
eps = 1e-20
for i in range(max_iterations):
prev_v = np.copy(v)
q_sa=np.zeros(env.env.nA)
for s in range(env.env.nS):
for a in range(env.env.nA):
q_sa[a] = sum([p*(r + gamma * prev_v[s_]) for p, s_, r, _ in env.env.P[s][a]])
v[s] = max(q_sa)
if (np.sum(np.fabs(prev_v - v)) <= eps):
print ('Value-iteration converged at iteration# %d.' %(i+1))
break
return v
if __name__ == '__main__':
env_name = 'FrozenLake-v0' # 'FrozenLake4x4-v0'
env = gym.make(env_name)
gamma = 1.0
optimal_v = value_iteration(env, gamma);
policy = extract_policy(optimal_v, gamma)
policy_score = evaluate_policy(env, policy, gamma, n=1000)
print('Policy average score = ', policy_score)
print(policy)
Policy Iteration和Value Iteration的区别:
①:Policy iteration主要包括两部分:policy evaluation+policy improvement,这两部分反复迭代,直到收敛。初始化一个策略policy,对策略policy进行价值评估,然后再根据价值,重新制定最优策略,反复迭代。
②:Value iteration主要包括两部分:finding optimal value function+one policy extraction,寻找一个最优的价值函数,然后根据价值函数,指定最优的策略,因为价值函数是最优的,所以策略也是最优的。
③:策略迭代的收敛速度更快一些,在状态空间较小时,最好选用策略迭代方法。当状态空间较大时,值迭代的计算量更小一些。
| Problem | Bellman Equation | Algorithm |
|---|---|---|
| Prediction | Bellman Expectation Equation | Iterative Policy Evaluation |
| Control | Bellman Expectation Equation | Policy Iteration |
| Control | Bellman Optimality Equation | Value Iteration |
Bellman expectation Equation:(当前状态跟未来状态的一个关联,\(G_t\)展开的首项是\(R_{t+1}\))
\tag 1
\]
\tag 2
\]
(3)式和(4)式象征着价值函数和q函数之间的关联
\tag 3
\]
\tag 4
\]
(4)式带入到(3)式中得到(象征着当前状态的价值与未来状态的价值之间的一个关联)

\tag 5
\]
(3)式带入到(4)式中得到(象征着当前时刻的q函数与未来时刻的q函数之间的一个关联):
\tag 6
\]
公式(5)进行backup后得到Bellman expectation backup:
\tag 7
\]
上式转换成马尔可夫奖励过程的形式:
\tag 8
\]
Bellman Optimality Equation:
\tag 9
\]
\tag {10}
\]
(10)式带入到(9)式得到:
\tag {11}
\]
(9)式带入到(10)式得到:
\tag {12}
\]
公式(4)进行backup后得到 Bellman Optimality backup:
\tag {13}
\]
周博磊老师强化学习纲领笔记第二课:MDP,Policy Iteration与Value Iteration的更多相关文章
- 李宏毅强化学习完整笔记!开源项目《LeeDeepRL-Notes》发布
Datawhale开源 核心贡献者:王琦.杨逸远.江季 提起李宏毅老师,熟悉强化学习的读者朋友一定不会陌生.很多人选择的强化学习入门学习材料都是李宏毅老师的台大公开课视频. 现在,强化学习爱好者有更完 ...
- 强化学习读书笔记 - 02 - 多臂老O虎O机问题
# 强化学习读书笔记 - 02 - 多臂老O虎O机问题 学习笔记: [Reinforcement Learning: An Introduction, Richard S. Sutton and An ...
- 强化学习读书笔记 - 05 - 蒙特卡洛方法(Monte Carlo Methods)
强化学习读书笔记 - 05 - 蒙特卡洛方法(Monte Carlo Methods) 学习笔记: Reinforcement Learning: An Introduction, Richard S ...
- 强化学习读书笔记 - 06~07 - 时序差分学习(Temporal-Difference Learning)
强化学习读书笔记 - 06~07 - 时序差分学习(Temporal-Difference Learning) 学习笔记: Reinforcement Learning: An Introductio ...
- 强化学习读书笔记 - 13 - 策略梯度方法(Policy Gradient Methods)
强化学习读书笔记 - 13 - 策略梯度方法(Policy Gradient Methods) 学习笔记: Reinforcement Learning: An Introduction, Richa ...
- 强化学习读书笔记 - 12 - 资格痕迹(Eligibility Traces)
强化学习读书笔记 - 12 - 资格痕迹(Eligibility Traces) 学习笔记: Reinforcement Learning: An Introduction, Richard S. S ...
- 强化学习读书笔记 - 11 - off-policy的近似方法
强化学习读书笔记 - 11 - off-policy的近似方法 学习笔记: Reinforcement Learning: An Introduction, Richard S. Sutton and ...
- 强化学习读书笔记 - 10 - on-policy控制的近似方法
强化学习读书笔记 - 10 - on-policy控制的近似方法 学习笔记: Reinforcement Learning: An Introduction, Richard S. Sutton an ...
- 强化学习读书笔记 - 09 - on-policy预测的近似方法
强化学习读书笔记 - 09 - on-policy预测的近似方法 参照 Reinforcement Learning: An Introduction, Richard S. Sutton and A ...
- 强化学习复习笔记 - DEEP
Outline 激活函数 使用逼近器的特点: 较少数量的参数表达复杂的函数 (计算复杂度) 对一个权重的调整可以影响到很多的点 (泛化能力) 多种特征表示和逼近器结构 (多样性) 激活函数 Sigmo ...
随机推荐
- Codeforces Round 169 (Div. 2)C. Little Girl and Maximum Sum(差分、贪心)
目录 题面 链接 题意 题解 代码 总结 题面 链接 C. Little Girl and Maximum Sum 题意 给q个[l,r]将所有这些区间里面的数相加和最大. 可以进行的操作是任意排列数 ...
- Docker下搭建MySql主从复制
在Docker环境下搭建MySql主从复制,阅读此文章默认读者具备基础的Docker命令操作. 一.环境 1.Docker版本:Docker version 24.0.5, build ced0996 ...
- 【译】32位 .NET Framework 项目的 WinForm 设计器选择
在客户反馈的推动下,Visual Studio 2022 向64位架构过渡,标志着增强开发体验的关键一步.正如 Klaus Loffelmann 在他的博客文章中所描述的那样,这种转换增强了整体性能和 ...
- Java多线程转账
Java多线程转账 关键词:多线程,Java 以前的一道面试题,要求是使用Java多线程,实现一个转账业务.不考虑数据库,不考虑其他第三方系统.只考虑当前Java程序内各个账户进行转账,保证转账金额正 ...
- MySQL---面经
如果想要对 MySQL 的索引树有更深入的了解,掘金的小册子:<MySQL 是怎样运行的> MySQL 是怎样运行的 以下是常见面试题 MySQL日志 MySQL日志系统 redo_log ...
- vue3,实战项目随心笔记
本项目模仿bibi 网站,主要是做一个pc和手机端的应用案例,主要涉及支付,三方登陆,css原子,妹子ui,路由缓存,组件封装,tailwindcss,vueuse 等常见企业级术应用, 由于本项目是 ...
- vue-helper 点击跳转插件 在 methods里面互相调用函数,会产生两个函数definitions ,然后就回弹出框让你选择,解决方案是加配置
vue-helper 点击跳转插件 在 methods里面互相调用函数,会产生两个函数definitions ,然后就回弹出框让你选择 原因:换了台电脑,又从新配置下vscode "edit ...
- iview 多弹框,显示z-index 不对,被遮挡的解决方案 goTop函数 modal Drawer 抽屉
iview 多弹框,显示z-index 不对,被遮挡的解决方案 goTop函数 modal 原因 弹多个modal框的时候,会被遮挡,导致后显示的框在下面 解决原理 获取当前弹框的z-index,然后 ...
- 摆脱鼠标系列 - vscode - 跳转到下一个文件 Ctrl(右边) + PageDown 这个很常用
为什么 摆脱鼠标系列 - vscode - 跳转到下一个文件 Ctrl(右边) + PageDown 这个很常用 右边Ctrl 就可以单手操控了 这个频率很高
- Xmind 括号图 风格不错,挺好看的
Xmind 括号图 风格不错,挺好看的 之前没注意到呢~ 又搞了个竖屏的,竖屏的关键点是 先隐藏第一层包括线,然后线就全部隐藏了,然后再选择要显示线的那部分,让线显示就ok了.