ROS(机器人操作系统)的基本了解
参考:
https://blog.csdn.net/qq_51963216/article/details/125754175
https://zhuanlan.zhihu.com/p/59560621
下图及文字来自(遵循 CC 4.0 BY-SA 版权协议):
https://blog.csdn.net/qq_51963216/article/details/125754175
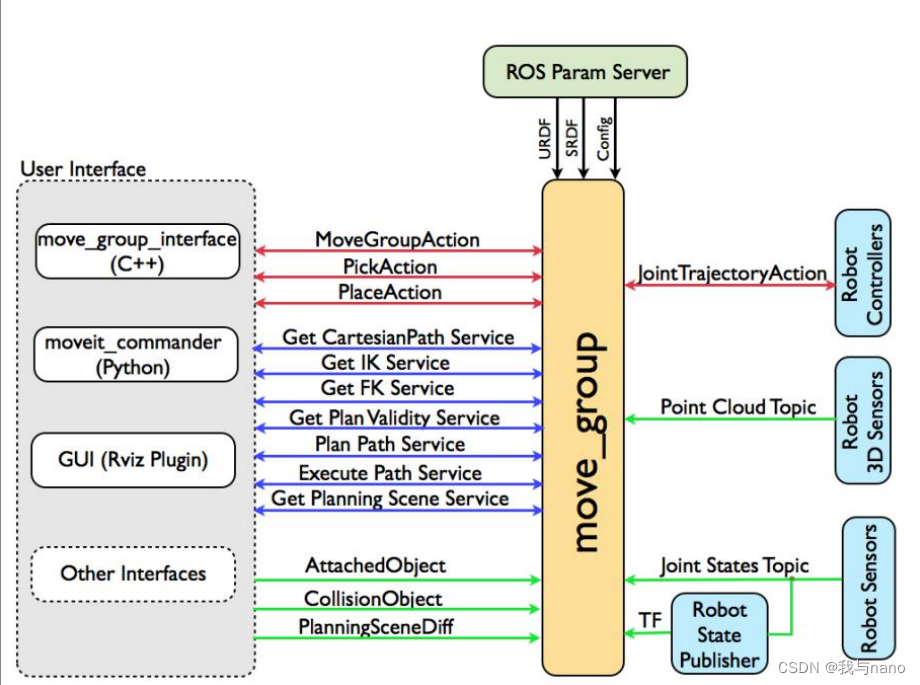
MoveIt由ROS(机器人操作系统)中一系列移动操作的功能包组成,包含运动规划,操作控制,3D感知,运动学,碰撞检测等等,是目前针对移动操作最先进的软件。 它提供了一个易于使用的平台,开发先进的机器人应用程序,评估新的机器人设计和建筑集成的机器人产品。 并且它已经应用于工业、商业、研发和其他领域,是目前被使用最广泛的开源操作软件。 此外,MoveIt提供了一系列成熟的插件和工具,可以实现机械臂控制的快速配置;并且 封装了大量API,方便用户在MoveIt 模块上进行二次开发,进而开发更多创意应用。
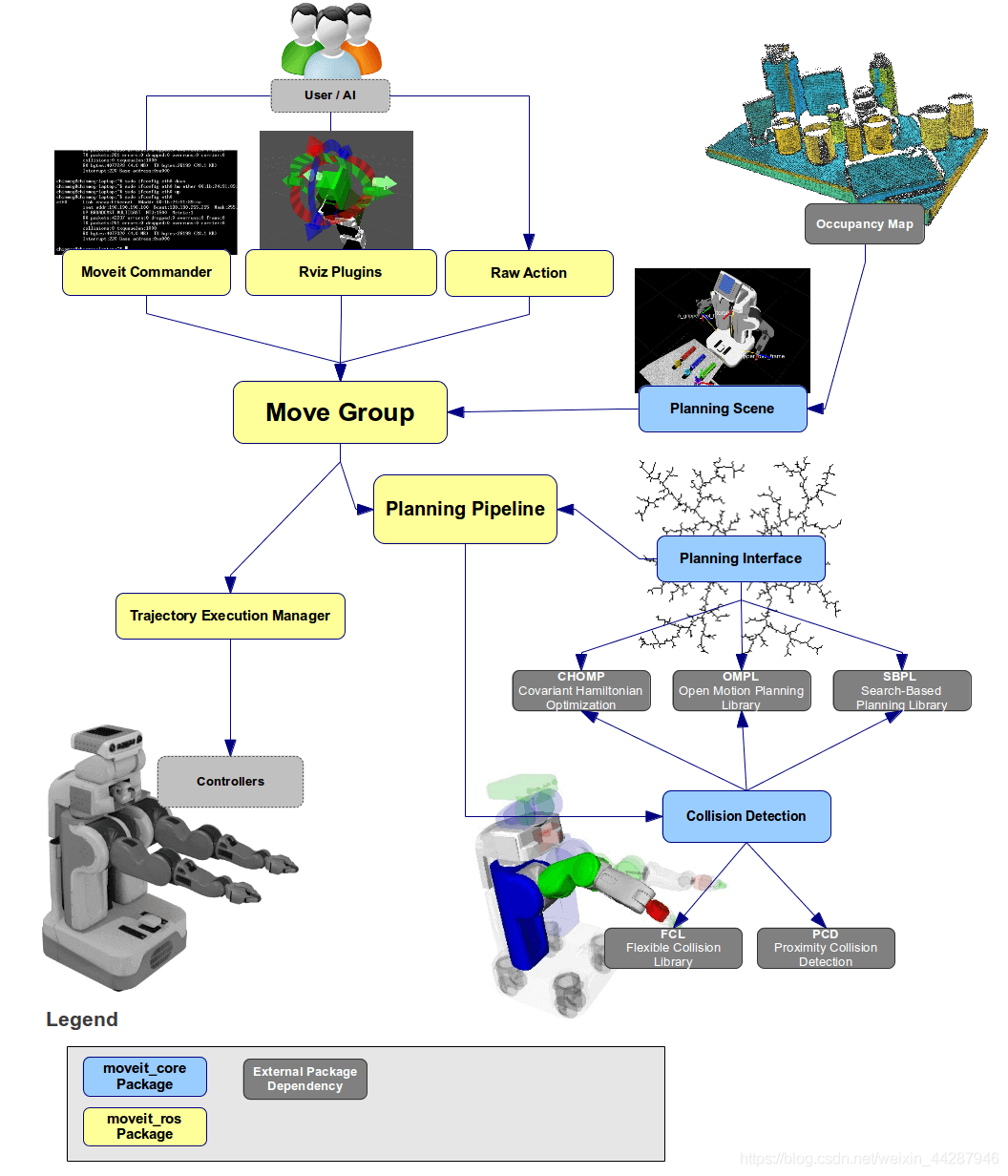
下图来自:https://blog.csdn.net/weixin_44287946/article/details/108108443
相关:
ROS(机器人操作系统)的基本了解的更多相关文章
- 【2017.10.13 ROS机器人操作系统】ROS系统常用术语及资源
ROS机器人操作系统是一种后操作系统,提供了类似于软件开发中使用到的中间件的功能. ROS: Robot Operating System 机器人操作系统 Package: 功能包 Stack: 功能 ...
- ROS机器人操作系统相关书籍、资料和学习路径
作者:Top Liu链接:https://zhuanlan.zhihu.com/p/30391098来源:知乎著作权归作者所有.商业转载请联系作者获得授权,非商业转载请注明出处. 本文是易科机器人实验 ...
- ROSCon 2016视频和幻灯片发布 ROS机器人操作系统重要参考资料
ROSCon 2016视频和幻灯片发布 By Tully Foote on 十月19,2016 7:28 AM 全部PPT下载地址:http://pan.baidu.com/s/1gf2sn2F RO ...
- 【2018.04.19 ROS机器人操作系统】机器人控制:运动规划、路径规划及轨迹规划简介之一
参考资料及致谢 本文的绝大部分内容转载自以下几篇文章,首先向原作者致谢,希望自己能在这些前辈们的基础上能有所总结提升. 1. 运动规划/路径规划/轨迹规划的联系与区别 https://blog.csd ...
- ROS机器人操作系统官方教程、源码汇总
1 wiki: http://wiki.ros.org/ 2 code: https://github.com/ ---- 1 基础教程 https://github.com/ros/ros_tut ...
- ROS机器人操作系统在线练习
废话不说,先看图吧: 1. ROS in 5 Days Entering ROS 2. ROS Navigation in 5 Days Mastering ROS 3. ROS Autonomous ...
- ROS机器人程序设计(原书第2版)补充资料 (柒) 第七章 3D建模与仿真 urdf Gazebo V-Rep Webots Morse
ROS机器人程序设计(原书第2版)补充资料 (柒) 第七章 3D建模与仿真 urdf Gazebo V-Rep Webots Morse 书中,大部分出现hydro的地方,直接替换为indigo或ja ...
- 机器人操作系统 除了Android还有一个ROS(转)
你知道市面上的机器人都采用了哪些操作系统吗? 估计大多数人给出的答案就是 Android 了.从市面上的产品来看,基于 Android 系统开发的机器人确实是主流,但是还有一种操作系统却鲜为人知,它叫 ...
- 快速了解 Robot Operating System(ROS) 机器人操作系统
http://www.ros.org/ 关于ROS About ROS http://www.ros.org/about-ros/ 机器人操作系统(ROS)是用于编写机器人软件的灵活框架.目的在简化 ...
- ROS(indigo)机器人操作系统学习有趣丰富的Gazebo仿真示例evarobot
一直在寻找一个示例可以将ROS学习中常用的基础内容大部分都包含进去,最好还包括Gazebo仿真, 这样即使没有硬件设备,也可以很好的学习ROS相关内容,但又必须有对应的硬件,便于后续研究. 这里,介绍 ...
随机推荐
- SMB3.0多通道叠加双网卡提速
SMB3.0多通道叠加双网卡提速 (双网卡.多网卡,NAS,局域网共享速度) WIN8及以上是默认开启的.(WIN10.WIN11 默认开启) 只需要同规格的网卡,比如你一张是1Gbps的,另一张网卡 ...
- 计算机网络实验一:vlan的创建与划分
这个是 pkt文件 有两道题 所以我是两个文件 https://pan.quark.cn/s/d4170897cb59 https://pan.quark.cn/s/da48878c77f5 发现 复 ...
- 高德的API来查询行政区域查询
高德的API来查询行政区域查询 1.api接口文档地址 https://lbs.amap.com/api/webservice/guide/api/district GET https://resta ...
- 关于vue中image控件,onload事件里,event.target 为null的奇怪问题探讨
废话不多说(主要文笔比较差),直接上代码 一个简单的demo,如下 <img :src="orginalImgSrc" style="display: none;& ...
- .NET下 支持大小写不敏感的JSON Schema验证方法
问题 有很多应用程序在验证JSON数据的时候用到了JSON Schema. 在微服务架构下,有时候各个微服务由于各种历史原因,它们所生成的数据对JSON Object属性名的大小写规则可能并不统一,它 ...
- Python图像暗水印添加
推荐使用库: blind-watermark pip install blind-watermark https://github.com/guofei9987/blind_watermark
- 异构智联Wi-Fi6+蓝牙模组,重新定义多屏互联体验!
下班回家打开门,电灯.电视.空调.音响.电动窗帘.扫地机器人--一呼百应,有序开工,原本冰冷的房子立刻变成了温暖港湾.可以说,舒适便捷的智能设备已经完全融入了我们的生活中. 从单一场景.单一设备,到现 ...
- Coap 协议学习:1-有关概念
COAP协议简介 不像人接入互联网的简单方便,由于物联网设备大多都是资源限制型的,有限的CPU.RAM.Flash.网络宽带等.对于这类设备来说,想要直接使用现有网络的TCP和HTTP来实现设备实现信 ...
- 在centos开启防火墙没启动22/tcp or 22/udp的情况下是如何ssh连上的
偶尔间查询防火墙的22/tcp or 22/udp ,看到是no的状态,而且此时也是ssh登陆的,然后就反复尝试,关闭22端口,开启,重载,重启.甚至连上另个服务器发现还是一样的情况.在群里问大佬们终 ...
- BigCodeBench: 继 HumanEval 之后的新一代代码生成测试基准
HumanEval 是一个用于评估大型语言模型 (LLM) 在代码生成任务中的参考基准,因为它使得对紧凑的函数级代码片段的评估变得容易.然而,关于其在评估 LLM 编程能力方面的有效性越来越多的担忧, ...