Python图像处理丨基于K-Means聚类的图像区域分割
摘要:本篇文章主要讲解基于理论的图像分割方法,通过K-Means聚类算法实现图像分割或颜色分层处理。
本文分享自华为云社区《[Python图像处理] 十九.图像分割之基于K-Means聚类的区域分割》,作者: eastmount。
本篇文章主要讲解基于理论的图像分割方法,通过K-Means聚类算法实现图像分割或颜色分层处理。基础性文章,希望对你有所帮助。
- 一.K-Means原理
- 二.K-Means聚类分割灰度图像
- 三.K-Means聚类对比分割彩色图像
注意 :该部分知识均为杨秀璋查阅资料撰写,未经授权禁止转载,谢谢!!如果有问题随时私聊我,只望您能从这个系列中学到知识,一起加油喔~
该系列在github所有源代码:https://github.com/eastmountyxz/ImageProcessing-Python
一.K-Means聚类原理
第一部分知识主要参考自己的新书《Python网络数据爬取及分析从入门到精通(分析篇)》和之前的博客 [Python数据挖掘课程] 二.Kmeans聚类数据分析。
K-Means聚类是最常用的聚类算法,最初起源于信号处理,其目标是将数据点划分为K个类簇,找到每个簇的中心并使其度量最小化。该算法的最大优点是简单、便于理解,运算速度较快,缺点是只能应用于连续型数据,并且要在聚类前指定聚集的类簇数。
下面是K-Means聚类算法的分析流程,步骤如下:
- 第一步,确定K值,即将数据集聚集成K个类簇或小组。
- 第二步,从数据集中随机选择K个数据点作为质心(Centroid)或数据中心。
- 第三步,分别计算每个点到每个质心之间的距离,并将每个点划分到离最近质心的小组,跟定了那个质心。
- 第四步,当每个质心都聚集了一些点后,重新定义算法选出新的质心。
- 第五步,比较新的质心和老的质心,如果新质心和老质心之间的距离小于某一个阈值,则表示重新计算的质心位置变化不大,收敛稳定,则认为聚类已经达到了期望的结果,算法终止。
- 第六步,如果新的质心和老的质心变化很大,即距离大于阈值,则继续迭代执行第三步到第五步,直到算法终止。
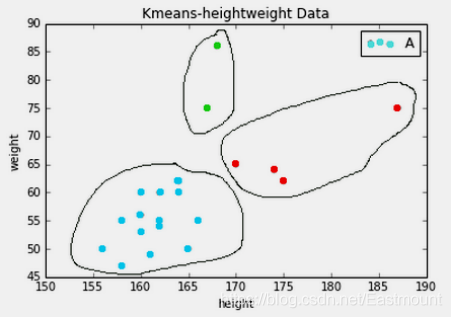
下图是对身高和体重进行聚类的算法,将数据集的人群聚集成三类。
二.K-Means聚类分割灰度图像
在图像处理中,通过K-Means聚类算法可以实现图像分割、图像聚类、图像识别等操作,本小节主要用来进行图像颜色分割。假设存在一张100×100像素的灰度图像,它由10000个RGB灰度级组成,我们通过K-Means可以将这些像素点聚类成K个簇,然后使用每个簇内的质心点来替换簇内所有的像素点,这样就能实现在不改变分辨率的情况下量化压缩图像颜色,实现图像颜色层级分割。
在OpenCV中,Kmeans()函数原型如下所示:
retval, bestLabels, centers = kmeans(data, K, bestLabels, criteria, attempts, flags[, centers])
- data表示聚类数据,最好是np.flloat32类型的N维点集
- K表示聚类类簇数
- bestLabels表示输出的整数数组,用于存储每个样本的聚类标签索引
- criteria表示算法终止条件,即最大迭代次数或所需精度。在某些迭代中,一旦每个簇中心的移动小于criteria.epsilon,算法就会停止
- attempts表示重复试验kmeans算法的次数,算法返回产生最佳紧凑性的标签
- flags表示初始中心的选择,两种方法是cv2.KMEANS_PP_CENTERS ;和cv2.KMEANS_RANDOM_CENTERS
- centers表示集群中心的输出矩阵,每个集群中心为一行数据
下面使用该方法对灰度图像颜色进行分割处理,需要注意,在进行K-Means聚类操作之前,需要将RGB像素点转换为一维的数组,再将各形式的颜色聚集在一起,形成最终的颜色分割。
# coding: utf-8
import cv2
import numpy as np
import matplotlib.pyplot as plt
#读取原始图像灰度颜色
img = cv2.imread('scenery.png', 0)
print img.shape
#获取图像高度、宽度
rows, cols = img.shape[:]
#图像二维像素转换为一维
data = img.reshape((rows * cols, 1))
data = np.float32(data)
#定义中心 (type,max_iter,epsilon)
criteria = (cv2.TERM_CRITERIA_EPS +
cv2.TERM_CRITERIA_MAX_ITER, 10, 1.0)
#设置标签
flags = cv2.KMEANS_RANDOM_CENTERS
#K-Means聚类 聚集成4类
compactness, labels, centers = cv2.kmeans(data, 4, None, criteria, 10, flags)
#生成最终图像
dst = labels.reshape((img.shape[0], img.shape[1]))
#用来正常显示中文标签
plt.rcParams['font.sans-serif']=['SimHei']
#显示图像
titles = [u'原始图像', u'聚类图像']
images = [img, dst]
for i in xrange(2):
plt.subplot(1,2,i+1), plt.imshow(images[i], 'gray'),
plt.title(titles[i])
plt.xticks([]),plt.yticks([])
plt.show()
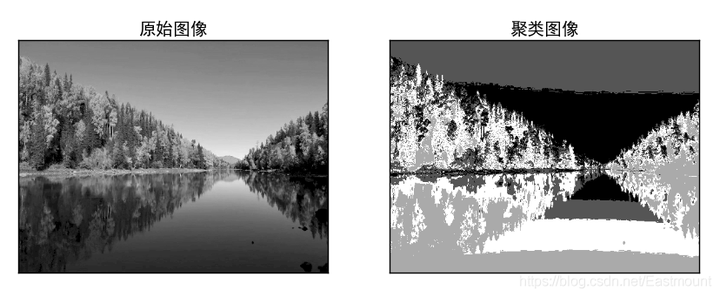
输出结果如图所示,左边为灰度图像,右边为K-Means聚类后的图像,它将灰度级聚集成四个层级,相似的颜色或区域聚集在一起。
三.K-Means聚类对比分割彩色图像
下面代码是对彩色图像进行颜色分割处理,它将彩色图像聚集成2类、4类和64类。
# coding: utf-8
import cv2
import numpy as np
import matplotlib.pyplot as plt
#读取原始图像
img = cv2.imread('scenery.png')
print img.shape
#图像二维像素转换为一维
data = img.reshape((-1,3))
data = np.float32(data)
#定义中心 (type,max_iter,epsilon)
criteria = (cv2.TERM_CRITERIA_EPS +
cv2.TERM_CRITERIA_MAX_ITER, 10, 1.0)
#设置标签
flags = cv2.KMEANS_RANDOM_CENTERS
#K-Means聚类 聚集成2类
compactness, labels2, centers2 = cv2.kmeans(data, 2, None, criteria, 10, flags)
#K-Means聚类 聚集成4类
compactness, labels4, centers4 = cv2.kmeans(data, 4, None, criteria, 10, flags)
#K-Means聚类 聚集成8类
compactness, labels8, centers8 = cv2.kmeans(data, 8, None, criteria, 10, flags)
#K-Means聚类 聚集成16类
compactness, labels16, centers16 = cv2.kmeans(data, 16, None, criteria, 10, flags)
#K-Means聚类 聚集成64类
compactness, labels64, centers64 = cv2.kmeans(data, 64, None, criteria, 10, flags)
#图像转换回uint8二维类型
centers2 = np.uint8(centers2)
res = centers2[labels2.flatten()]
dst2 = res.reshape((img.shape))
centers4 = np.uint8(centers4)
res = centers4[labels4.flatten()]
dst4 = res.reshape((img.shape))
centers8 = np.uint8(centers8)
res = centers8[labels8.flatten()]
dst8 = res.reshape((img.shape))
centers16 = np.uint8(centers16)
res = centers16[labels16.flatten()]
dst16 = res.reshape((img.shape))
centers64 = np.uint8(centers64)
res = centers64[labels64.flatten()]
dst64 = res.reshape((img.shape))
#图像转换为RGB显示
img = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
dst2 = cv2.cvtColor(dst2, cv2.COLOR_BGR2RGB)
dst4 = cv2.cvtColor(dst4, cv2.COLOR_BGR2RGB)
dst8 = cv2.cvtColor(dst8, cv2.COLOR_BGR2RGB)
dst16 = cv2.cvtColor(dst16, cv2.COLOR_BGR2RGB)
dst64 = cv2.cvtColor(dst64, cv2.COLOR_BGR2RGB)
#用来正常显示中文标签
plt.rcParams['font.sans-serif']=['SimHei']
#显示图像
titles = [u'原始图像', u'聚类图像 K=2', u'聚类图像 K=4',
u'聚类图像 K=8', u'聚类图像 K=16', u'聚类图像 K=64']
images = [img, dst2, dst4, dst8, dst16, dst64]
for i in xrange(6):
plt.subplot(2,3,i+1), plt.imshow(images[i], 'gray'),
plt.title(titles[i])
plt.xticks([]),plt.yticks([])
plt.show()
输出结果如下图所示,当K=2颜色聚集成两种,当K=64颜色聚集成64种。

Python图像处理丨基于K-Means聚类的图像区域分割的更多相关文章
- 跟我学Python图像处理丨基于灰度三维图的图像顶帽运算和黑帽运算
摘要:本篇文章结合灰度三维图像讲解图像顶帽运算和图像黑猫运算,通过Python调用OpenCV函数实现. 本文分享自华为云社区<[Python图像处理] 十三.基于灰度三维图的图像顶帽运算和黑帽 ...
- Python图像处理丨基于OpenCV和像素处理的图像灰度化处理
摘要:本篇文章讲解图像灰度化处理的知识,结合OpenCV调用cv2.cvtColor()函数实现图像灰度操作,使用像素处理方法对图像进行灰度化处理. 本文分享自华为云社区<[Python图像处理 ...
- Python图像处理丨带你认识图像量化处理及局部马赛克特效
摘要:本文主要讲述如何进行图像量化处理和采样处理及局部马赛克特效. 本文分享自华为云社区<[Python图像处理] 二十.图像量化处理和采样处理及局部马赛克特效>,作者: eastmoun ...
- 跟我学Python图像处理丨图像分类原理与案例
摘要:本篇文章将分享图像分类原理,并介绍基于KNN.朴素贝叶斯算法的图像分类案例. 本文分享自华为云社区<[Python图像处理] 二十六.图像分类原理及基于KNN.朴素贝叶斯算法的图像分类案例 ...
- Python图像处理丨详解图像去雾处理方法
摘要:本文主要讲解ACE去雾算法.暗通道先验去雾算法以及雾化生成算法. 本文分享自华为云社区<[Python图像处理] 三十.图像预处理之图像去雾详解(ACE算法和暗通道先验去雾算法)丨[拜托了 ...
- Python图像处理丨认识图像锐化和边缘提取的4个算子
摘要:图像锐化和边缘提取技术可以消除图像中的噪声,提取图像信息中用来表征图像的一些变量,为图像识别提供基础. 本文分享自华为云社区<[Python图像处理] 十七.图像锐化与边缘检测之Rober ...
- 跟我学Python图像处理丨傅里叶变换之高通滤波和低通滤波
摘要:本文讲解基于傅里叶变换的高通滤波和低通滤波. 本文分享自华为云社区<[Python图像处理] 二十三.傅里叶变换之高通滤波和低通滤波>,作者:eastmount . 一.高通滤波 傅 ...
- Python图像处理丨5种图像处理特效
摘要:本篇文章主要讲解了图像常见的特效处理,从处理效果图.算法原理.代码实现三个步骤进行详细讲解,涉及图像素描特效.怀旧特效.光照特效.流年特效.图像滤镜等. 本文分享自华为云社区<[Pytho ...
- 跟我学Python图像处理丨带你入门OpenGL
摘要:介绍Python和OpenGL的入门知识,包括安装.语法.基本图形绘制等. 本文分享自华为云社区<[Python图像处理] 二十七.OpenGL入门及绘制基本图形(一)>,作者:ea ...
- 5-Spark高级数据分析-第五章 基于K均值聚类的网络流量异常检测
据我们所知,有‘已知的已知’,有些事,我们知道我们知道:我们也知道,有 ‘已知的未知’,也就是说,有些事,我们现在知道我们不知道.但是,同样存在‘不知的不知’——有些事,我们不知道我们不知道. 上一章 ...
随机推荐
- 内存与CPU:计算机默契交互的关键解析
内存 内存和CPU之间的交互是计算机体系结构中至关重要的一部分.它们之间的互动类似于一对不可分割的爱侣,彼此相互依赖且密不可分.没有内存,CPU无法执行程序指令,这样计算机就会变得毫无意义.同样地,如 ...
- mysql 表级锁之一lock table
1.lock table t1 read: 1.1.当前线程: 读/写当前表/其他表: unlock tables; lock table t1 read; select * from t1; INS ...
- L3-008 喊山
#include <bits/stdc++.h> using namespace std; using pii = pair<int, int>; const int N = ...
- L2-039 清点代码库
#include <bits/stdc++.h> using namespace std; const int N = 10010, M = 110; int main() { int n ...
- 代替gets()的新操作
1 scanf("%[^\n]", s); ^是"非" \n是换行 所以这就是一直读到\n才结束
- 提高cin cout的速度
ios::sync_with_stdio(false) :用来关闭iostream与stdio的同步,从而提高 cin cout 的效率,但是就不能再用 scanf printf 了,因为不关闭之前 ...
- go基础-函数
概述 在任何语言中函数都是极其重要的内容,业务功能都是由一个或多个函数组合完成.go语言是函数式编程语言,函数是一等公民,可以被传递.有函数类型,go语言有三种类型的函数,普通函数.匿名函数(Lamb ...
- React 应用构建(环境)
可以少去理解一些不必要的概念,而多去思考为什么会有这样的东西,它解决了什么问题,或者它的运行机制是什么? 一. 环境搭建 工作编辑器:Visual Studio Code. Javascript 解析 ...
- python列表排序之sort(),sorted()和reverse()
sort() 正序 sort()可以按字母的顺序来对列表进行永久性排序(改变列表自身的排序): list_1 = ['one', 'two', 'three', 'four', 'five'] pri ...
- 终端必备大杀器----Fish
目录 下载 安装 添加 权限 依赖库安装 cmake 预处理 编译 安装 配置fish 其他 下载 Github 地址-- fish-shell openSUSE 开源下载地址 openSUSE 开源 ...