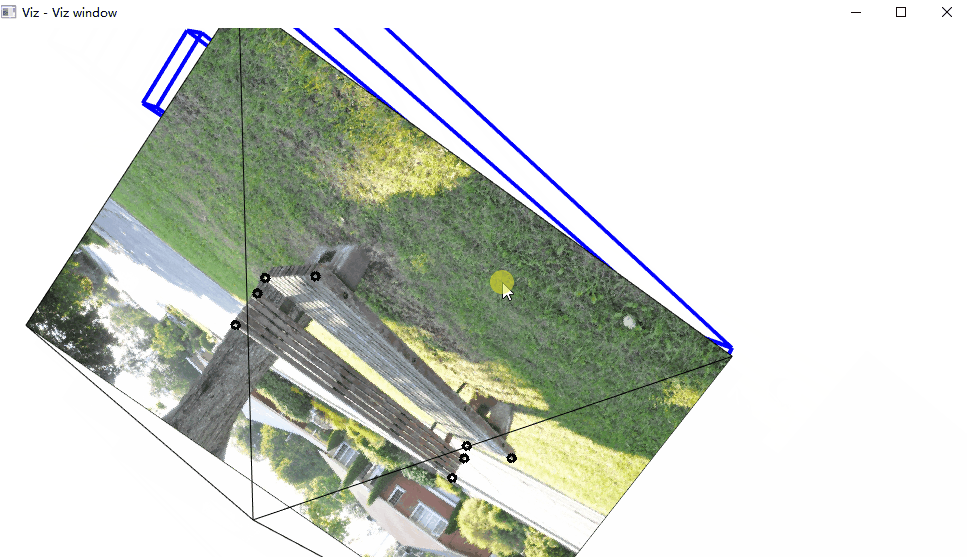
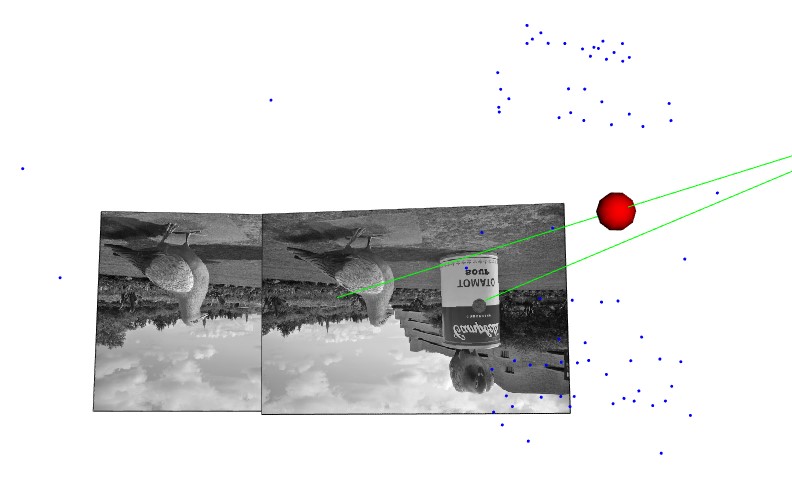
基于OpenCV做“三维重建”(4)--相机姿态还原和实现三维重建
v当我们构建成功了viz,就可以使用3维效果给我们提供的便利,进一步进行一些3维的操作。

附件列表
基于OpenCV做“三维重建”(4)--相机姿态还原和实现三维重建的更多相关文章
- 基于OpenCV做“三维重建”(1)--找到并绘制棋盘
<OpenCV计算机视觉编程攻略(第3版)>这套书已经出到第3版了,如果你非要我说这本书有多好,我说不出来:只是很多我第一手的例子都是来源于这本书的-相比较OpenCV官方提供的代码,这本 ...
- 基于OpenCV做“三维重建”(3)--相机参数矩阵
通过前面的相机标定,我们能够获得一些参数模型.但是这些相机的参数矩阵到底是什么意思?怎样才能够判断是否正确?误差都会来自哪里?这里就必须要通过具体实验来加深认识.采集带相机参数的图片具有一定难度,幸好 ...
- 基于OpenCV做“三维重建”(0)-- OpenCV3.2+VIZ6.3.0在vs2012下的编译和使用
一.问题提出 ViZ对于显示3维的效果图来说,非常有帮助:我在使用OpenCV进行双目测距的过程中,有一些参数希望能够通过可视化的方法显示出来,所以参考了这方面相关的资料.做了一些实验 ...
- 基于OpenCV做“三维重建”(2)--封装标定过程
既然已经能够找到了标定点,那么下边的工作就是使用标定结果了.[这本书在这里的内容组织让人莫名其妙]但是通过阅读代码能够很方便地串起来. /*------------------------------ ...
- OpenCV Using Python——基于SURF特征提取和金字塔LK光流法的单目视觉三维重建 (光流、场景流)
https://blog.csdn.net/shadow_guo/article/details/44312691 基于SURF特征提取和金字塔LK光流法的单目视觉三维重建 1. 单目视觉三维重建问题 ...
- 基于 OpenCV 的人脸识别
基于 OpenCV 的人脸识别 一点背景知识 OpenCV 是一个开源的计算机视觉和机器学习库.它包含成千上万优化过的算法,为各种计算机视觉应用提供了一个通用工具包.根据这个项目的关于页面,OpenC ...
- 基于OpenCV的双目视觉匹配测距系统
刚读研究生的时候,自己导师研究的方向是双目视觉,于是让自己研究OpenCV,折腾了几个月,算法上没啥突破,不过工程上还是折腾出了一个能用的小玩意,基于OpenCV实现了相机的标定.双目视觉图片的矫正. ...
- [转载]卡尔曼滤波器及其基于opencv的实现
卡尔曼滤波器及其基于opencv的实现 源地址:http://hi.baidu.com/superkiki1989/item/029f65013a128cd91ff0461b 这个是维基百科中的链接, ...
- 每日一练之自适应中值滤波器(基于OpenCV实现)
本文主要介绍了自适应的中值滤波器,并基于OpenCV实现了该滤波器,并且将自适应的中值滤波器和常规的中值滤波器对不同概率的椒盐噪声的过滤效果进行了对比.最后,对中值滤波器的优缺点了进行了总结. 空间滤 ...
随机推荐
- ubus socket always in connecting status
When we try to transplant ubus to uclinux, ubusd can't run but "ubus list" will hang up. 1 ...
- Js中Map对象的使用
Js中Map对象的使用 1.定义 键/值对的集合. 2.语法 mapObj = new Map() 3.备注 集合中的键和值可以是任何类型.如果使用现有密钥向集合添加值,则新值会替换旧值. 4.属性 ...
- hdfs核心主件服务的启停方式
停止mapreduce服务 /hadoop/hadoop-2.6.4/sbin/stop-yarn.sh 启动mapreduce服务 /hadoop/hadoop-2.6.4/sbin/start-y ...
- model中的自动验证 $_validate $_auto
普通模式: <?php class UserModel extends RelationModel{ /**自动验证**/ protected $_validate = array( /**ar ...
- ASM
一. 磁盘阵列 RAID 5 二. STRRPE 三. LAT 四. [root@localhost ~]# fdisk /dev/sdjDevice contains neither a valid ...
- Redis考察点解析
目录 1. Redis数据结构 1. 常用数据结构 2. 高级数据结构 2. Redis分布式锁 1. Redis分布式锁原理 2. 如果在setnx之后执行expire之前进程意外crash或者要重 ...
- Percona-Toolkit 之 pt-table-checksum 总结
pt-table-checksum - Verify MySQL replication integrity. pt-table-checksum performs an online replica ...
- Java中数组的几个常用算法:插入算法,删除算法,冒泡排序算法
前言: 在Java中我们常常会用数组,提到数组就不得不介绍数组中常用到的几个算法. 有插入算法,删除算法,冒泡排序算法等. 在学习这几个数组的算法前,我们先来了解一下关于数组一些基本知识. 数组的基本 ...
- 2019-oo-第二次总结
这一单元是关于模拟电梯运行,考验多线程的一个单元,难度由简入入深,从多线程单部电梯,到优化,再到多线程多部电梯,难度一次次的提高. 一.多线程单部电梯(傻瓜调度) 1.设计策略 这一次我只额外的开了一 ...
- 在CentOS上安装Python3的三种方法
Centos7默认自带了Python2.7版本,但是因为项目需要使用Python3.x你可以按照此文的三个方法进行安装. 注:本文示例安装版本为Python3.5, 一.Python源代码编译安装 安 ...