树莓派 -- oled
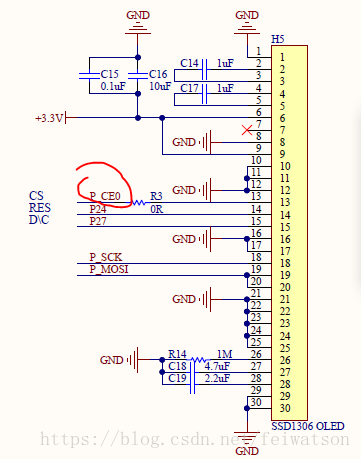
硬件
SPI0,CE0
SPI Master Driver
设备树
arch\arm\boot\dts\bcm2710-rpi-3-b.dts
&gpio {
spi0_pins: spi0_pins {
brcm,pins = <9 10 11>;
brcm,function = <4>; /* alt0 */
};
spi0_cs_pins: spi0_cs_pins {
brcm,pins = <8 7>;
brcm,function = <1>; /* output */
};
}&spi0 {
pinctrl-names = "default";
pinctrl-0 = <&spi0_pins &spi0_cs_pins>;
cs-gpios = <&gpio 8 1>, <&gpio 7 1>;
spidev0: spidev@0{
compatible = "spidev";
reg = <0>; /* CE0 */
#address-cells = <1>;
#size-cells = <0>;
spi-max-frequency = <125000000>;
};
spidev1: spidev@1{
compatible = "spidev";
reg = <1>; /* CE1 */
#address-cells = <1>;
#size-cells = <0>;
spi-max-frequency = <125000000>;
};
};spi0
arch\arm\boot\dts\bcm283x.dtsi
soc {
compatible = "simple-bus";
#address-cells = <1>;
#size-cells = <1>;
spi: spi@7e204000 {
compatible = "brcm,bcm2835-spi";
reg = <0x7e204000 0x1000>;
interrupts = <2 22>;
clocks = <&clocks BCM2835_CLOCK_VPU>;
#address-cells = <1>;
#size-cells = <0>;
status = "disabled";
};
}arch\arm\boot\dts\bcm270x.dtsi
soc: soc {
spi0: spi@7e204000 {
/* Add alias */
dmas = <&dma 6>, <&dma 7>;
dma-names = "tx", "rx";
};
}bcm2835-spi
drivers\spi\spi-bcm2835.c
static struct platform_driver bcm2835_spi_driver = {
.driver = {
.name = DRV_NAME,
.of_match_table = bcm2835_spi_match,
},
.probe = bcm2835_spi_probe,
.remove = bcm2835_spi_remove,
};compatible
static const struct of_device_id bcm2835_spi_match[] = {
{ .compatible = "brcm,bcm2835-spi", },
{}
};probe函数
static int bcm2835_spi_probe(struct platform_device *pdev)
{
struct spi_master *master;
struct bcm2835_spi *bs;
struct resource *res;
int err;
master = spi_alloc_master(&pdev->dev, sizeof(*bs));
if (!master) {
dev_err(&pdev->dev, "spi_alloc_master() failed\n");
return -ENOMEM;
}
platform_set_drvdata(pdev, master);
master->mode_bits = BCM2835_SPI_MODE_BITS;
master->bits_per_word_mask = SPI_BPW_MASK(8);
master->num_chipselect = 3;
master->setup = bcm2835_spi_setup;
master->set_cs = bcm2835_spi_set_cs;
master->transfer_one = bcm2835_spi_transfer_one;
master->handle_err = bcm2835_spi_handle_err;
master->prepare_message = bcm2835_spi_prepare_message;
master->dev.of_node = pdev->dev.of_node;
bs = spi_master_get_devdata(master);
res = platform_get_resource(pdev, IORESOURCE_MEM, 0);
bs->regs = devm_ioremap_resource(&pdev->dev, res);
if (IS_ERR(bs->regs)) {
err = PTR_ERR(bs->regs);
goto out_master_put;
}
bs->clk = devm_clk_get(&pdev->dev, NULL);
if (IS_ERR(bs->clk)) {
err = PTR_ERR(bs->clk);
dev_err(&pdev->dev, "could not get clk: %d\n", err);
goto out_master_put;
}
bs->irq = platform_get_irq(pdev, 0);
if (bs->irq <= 0) {
dev_err(&pdev->dev, "could not get IRQ: %d\n", bs->irq);
err = bs->irq ? bs->irq : -ENODEV;
goto out_master_put;
}
clk_prepare_enable(bs->clk);
bcm2835_dma_init(master, &pdev->dev);
/* initialise the hardware with the default polarities */
bcm2835_wr(bs, BCM2835_SPI_CS,
BCM2835_SPI_CS_CLEAR_RX | BCM2835_SPI_CS_CLEAR_TX);
err = devm_request_irq(&pdev->dev, bs->irq, bcm2835_spi_interrupt, 0,
dev_name(&pdev->dev), master);
if (err) {
dev_err(&pdev->dev, "could not request IRQ: %d\n", err);
goto out_clk_disable;
}
err = devm_spi_register_master(&pdev->dev, master);
if (err) {
dev_err(&pdev->dev, "could not register SPI master: %d\n", err);
goto out_clk_disable;
}
return 0;
out_clk_disable:
clk_disable_unprepare(bs->clk);
out_master_put:
spi_master_put(master);
return err;
}在probe函数中调用了devm_spi_register_master
spi device
#define devm_spi_register_master(_dev, _ctlr) \
devm_spi_register_controller(_dev, _ctlr)在drivers/spi/spi.c中,定义了devm_spi_register_controller
/**
* devm_spi_register_controller - register managed SPI master or slave
* controller
* @dev: device managing SPI controller
* @ctlr: initialized controller, originally from spi_alloc_master() or
* spi_alloc_slave()
* Context: can sleep
*
* Register a SPI device as with spi_register_controller() which will
* automatically be unregistered and freed.
*
* Return: zero on success, else a negative error code.
*/
int devm_spi_register_controller(struct device *dev,
struct spi_controller *ctlr)
{
struct spi_controller **ptr;
int ret;
ptr = devres_alloc(devm_spi_unregister, sizeof(*ptr), GFP_KERNEL);
if (!ptr)
return -ENOMEM;
ret = spi_register_controller(ctlr);
if (!ret) {
*ptr = ctlr;
devres_add(dev, ptr);
} else {
devres_free(ptr);
}
return ret;
}在spi_register_controller中调用
status = device_add(&ctlr->dev);spi device的file operations在drivers/spi/spidev.c中定义
static const struct file_operations spidev_fops = {
.owner = THIS_MODULE,
/* REVISIT switch to aio primitives, so that userspace
* gets more complete API coverage. It'll simplify things
* too, except for the locking.
*/
.write = spidev_write,
.read = spidev_read,
.unlocked_ioctl = spidev_ioctl,
.compat_ioctl = spidev_compat_ioctl,
.open = spidev_open,
.release = spidev_release,
.llseek = no_llseek,
};
wiringPi oled例程
wiringPi在用户空间通过SPI master device的API, open, release, ioctl, read, write来驱动oled.
static const char *spiDev0 = "/dev/spidev0.0" ;
static const char *spiDev1 = "/dev/spidev0.1" ;/*
* wiringPiSPISetupMode:
* Open the SPI device, and set it up, with the mode, etc.
*********************************************************************************
*/
int wiringPiSPISetupMode (int channel, int speed, int mode)
{
int fd ;
mode &= 3 ; // Mode is 0, 1, 2 or 3
channel &= 1 ; // Channel is 0 or 1
if ((fd = open (channel == 0 ? spiDev0 : spiDev1, O_RDWR)) < 0)
return wiringPiFailure (WPI_ALMOST, "Unable to open SPI device: %s\n", strerror (errno)) ;
spiSpeeds [channel] = speed ;
spiFds [channel] = fd ;
// Set SPI parameters.
if (ioctl (fd, SPI_IOC_WR_MODE, &mode) < 0)
return wiringPiFailure (WPI_ALMOST, "SPI Mode Change failure: %s\n", strerror (errno)) ;
if (ioctl (fd, SPI_IOC_WR_BITS_PER_WORD, &spiBPW) < 0)
return wiringPiFailure (WPI_ALMOST, "SPI BPW Change failure: %s\n", strerror (errno)) ;
if (ioctl (fd, SPI_IOC_WR_MAX_SPEED_HZ, &speed) < 0)
return wiringPiFailure (WPI_ALMOST, "SPI Speed Change failure: %s\n", strerror (errno)) ;
return fd ;
}树莓派 devfs sysfs中SPI设备
查看/dev
pi@raspberrypi:~ $ ls /dev | grep spi
spidev0.0
spidev0.1
查看/sys/class
pi@raspberrypi:/sys/class/spi_master $ ls
spi0
pi@raspberrypi:/sys/class/spi_master $ cd spi0
pi@raspberrypi:/sys/class/spi_master/spi0 $ ls
device of_node power spi0.0 spi0.1 statistics subsystem uevent
pi@raspberrypi:/sys/class/spi_master/spi0 $ cd of_node
pi@raspberrypi:/sys/class/spi_master/spi0/of_node $ ls
#address-cells cs-gpios interrupts pinctrl-0 #size-cells status
clocks dma-names name pinctrl-names spidev@0
compatible dmas phandle reg spidev@1
pi@raspberrypi:/sys/class/spi_master/spi0/of_node $ cat compatible
brcm,bcm2835-spi
pi@raspberrypi:/sys/class/spi_master/spi0/of_node $ cd spidev@0
pi@raspberrypi:/sys/class/spi_master/spi0/of_node/spidev@0 $ ls
#address-cells compatible name phandle reg #size-cells spi-max-frequency
pi@raspberrypi:/sys/class/spi_master/spi0/of_node/spidev@0 $ cat compatible
spidev树莓派 -- oled的更多相关文章
- 树莓派OLED模块的使用教程大量例程详解
简介 Python有两个可以用的OLED库 [Adafruit_Python_SSD1306库]->只支持SSD1306 [Luma.oled库]->支持SSD1306 / SSD1309 ...
- 树莓派 -- oled 续(2) python
上文中的代码通过wiringPi的API调用devfs API来显示图片. 这里分析的Python代码也通过类似的方法来显示图片. 主要用到了两个Library. import spidev impo ...
- 树莓派 -- oled 续(1) wiringPi
在上文中,分析了wiringPi 的oled demo是使用devfs来控制spi master和spi slave通讯. https://blog.csdn.net/feiwatson/articl ...
- 基础篇:一文讲懂树莓派命令行文本编辑工具Vim的使用
简介 众所周知,在Linux系统下的命令行调试界面,经常会遇到需要文本编辑的情况,而树莓派官方系统默认自带了Nano编辑器,Nano的操作门槛更低,但却不如Vim编辑器方便.Vim编辑器是由早期在Li ...
- 树莓派使用 OLED 屏显示图片及文字
树莓派默认是不带显示屏的,如果想要查看系统的一些信息,需要使用电脑登录到树莓派,或者通过 HDMI 连接外接显示器查看.这样做总是有点麻烦,我们可以通过外接一个 OLED 屏来显示一些关键参数或者图片 ...
- 31 树莓派外接Oled屏幕
http://shumeipai.nxez.com/2017/09/13/solve-the-raspberry-pi-drive-oled-problem.html
- 树莓派之OLED12864视频播放—BadApple
代码地址如下:http://www.demodashi.com/demo/13218.html 概述 本篇教程讲述了使用树莓派驱动OLED12864液晶屏,并在液晶屏上播放动画和视频. 硬件平台 树莓 ...
- Raspberry Pi3驱动Oled ssh1106屏
Raspberry Pi3可以直接使用GPIO接口驱动OLED屏 一.接线 根据网上随便找的图可以看到树莓派3的GPIO接口引脚顺序 PS:26pin的GPIO为前26针 根据OLED屏的引脚说明,如 ...
- 树莓派 PICO基础教程(基于MicroPython)
目录 1 树莓派 PICO 简介 1.1 简介 1.2 配置 [^2] 1.3 引脚图 1.4 尺寸 2 安装 2.1 烧录固件 2.2 安装IDE(Thonny IDE) 2.3 离线运行程序 3 ...
随机推荐
- bzoj 2005: [Noi2010]能量采集【莫比乌斯反演】
注意到k=gcd(x,y)-1,所以答案是 \[ 2*(\sum_{i=1}^{n}\sum_{i=1}^{m}gcd(i,j))-n*m \] 去掉前面的乘和后面的减,用莫比乌斯反演来推,设n< ...
- [luogu4931]情侣?给我烧了!
题解 有\(i\)对情侣全都不和谐那里推不出来只好写了一个暴力容斥然后大力卡常卡过去了== 容斥太过暴力,还是说正解吧 可以考虑直接计算\(n\)对情侣有\(k\)对和谐的方案数 设\(g[i]\)表 ...
- _bzoj1500 [NOI2005]维修数列【真·Splay】
传送门:http://www.lydsy.com/JudgeOnline/problem.php?id=1500 注意MAX-SUM的时候,不可以是空串. #include <cstdio> ...
- 水题 Codeforces Round #307 (Div. 2) A. GukiZ and Contest
题目传送门 /* 水题:开个结构体,rk记录排名,相同的值有相同的排名 */ #include <cstdio> #include <cstring> #include < ...
- Linux tcpdump命令英文文档
https://www.computerhope.com/unix/tcpdump.htm
- 如何用PS快速做出3D按钮效果的图片
1 先建立一个透明图层 2:再创建一个矩形 3:选用过喷样式 4: 双击图层并应用蓝色,记得这里应该复制下颜色的16进制值. 效果如图所示 取消光泽选项,大功告成! 最终效果如图所示,将其保存为PNG ...
- 总结用CoreText绘制文本时遇到的问题以及解决办法
关于CoreText不做解释.用的人自然知道这个是干什么的. 功能非常强大,可以绘制文本,图片等. 这次用的Xcode7.0的版本.所以之前很多方法,现在不能用.也不是不能用,就是有黄色警告很不爽. ...
- windows下Python的安装,以及IDLE的使用
一.Python的下载安装 (1)python的windows安装包可以从https://www.python.org 网址中下载,可以下载3.4版本的或者2.7版本的.(2)下载后直接运行即可.然后 ...
- net start iisadmin报错:系统找不到指定的文件
IIS Admin Service不能启动 ,直接启动或命令(net start iisadmin)都不成功.导致IIS站点访问异常. 最终参考网上解决方案: 这是大多是由于windows\syste ...
- visual studio 2015 key vs2015密钥
Visual Studio Professional 2015简体中文版(专业版)KEY:HMGNV-WCYXV-X7G9W-YCX63-B98R2Visual Studio Enterprise 2 ...