目标检测的评价指标(TP、TN、FP、FN、Precision、Recall、IoU、mIoU、AP、mAP)
1. TP TN FP FN
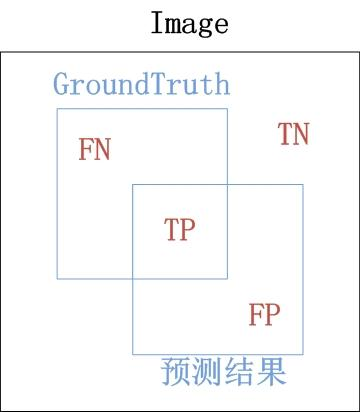
GroundTruth 预测结果
TP(True Positives): 真的正样本 = 【正样本 被正确分为 正样本】
TN(True Negatives): 真的负样本 = 【负样本 被正确分为 负样本】
FP(False Positives): 假的正样本 = 【负样本 被错误分为 正样本】
FN(False Negatives):假的负样本 = 【正样本 被错误分为 负样本】
2. Precision(精度)和 Recall(召回率)
\(Precision=\frac {TP} {TP+FP} \text{ }\) 即 预测正确的部分 占 预测结果 的比例
\(Recall=\frac {TP} {TP+FN} \text{ }\) 即 预测正确的部分 占 GroundTruth 的比例
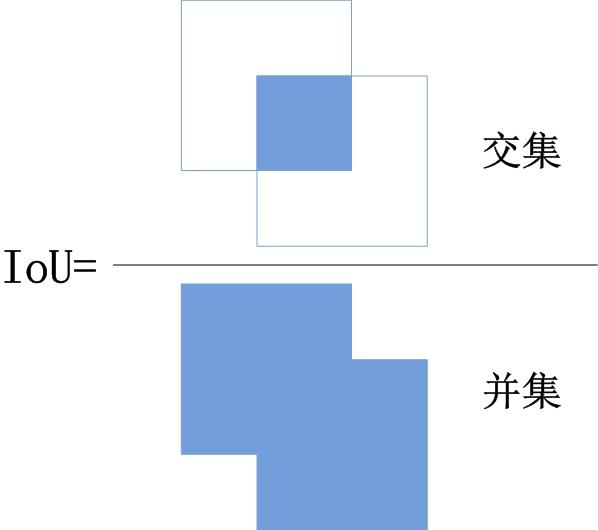
3. IoU(Intersection over Union)
\]
4. AP
(1) 找出 预测结果 中 TP(正确的正样本) 和 FP(误分为正样本) 的检测框
设置IoU的阈值,如IoU=0.5
IoU值大于0.5 预测结果 正确;否则, 预测结果 错误,如下图所示
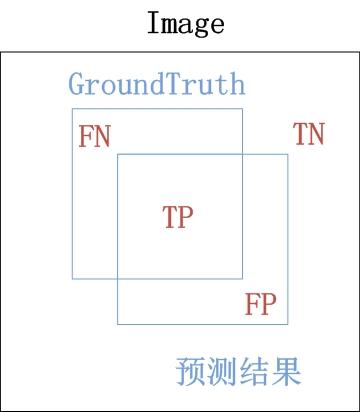
- \(IoU=\frac {TP} {TP+FP+FN} \gt 0.5\) 预测结果:TP
- \(IoU=\frac {TP} {TP+FP+FN} \lt 0.5\) 预测结果:FP
注意:这里的TP、FP与图示中的TP、FP在理解上略有不同
(2) 计算 不同置信度阈值 的 Precision、Recall
a. 设置不同的置信度阈值,会得到不同数量的检测框:
阈值高,得到检测框数量少;
阈值低,得到检测框数量多。
b. 对于 步骤a 中不同的置信度阈值得到 检测框(数量)=TP(数量)+FP(数量)
c. 计算Precision,按照上面步骤(1)中使用IoU计算TP、FP的方法,将步骤b中的检测框(数量)划分为TP(数量)、FP(数量)
\]
d. 计算Recall,由于TP+FN是GroundTruth(即已知的检测框的数量),则可以得到:
\]
e. 计算AP,不同置信度阈值会得到多组(Precision,Recall)
假设我们得到了三组(Precision,Recall):
(0.9, 0.2),(0.5, 0.2),(0.7, 0.6),如下图中所示
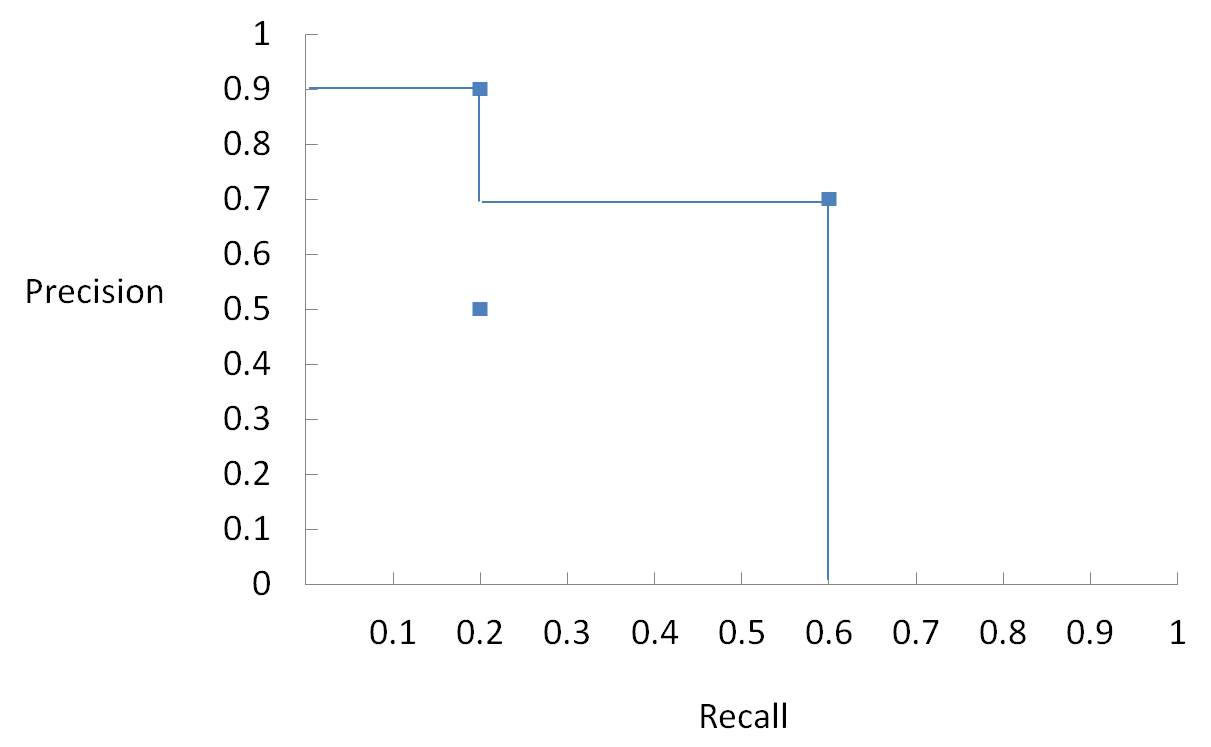
AP=上图中所围成的面积,即 AP = 0.9 x 0.2 + 0.7 x 0.4 = 0.46
5. mIoU、mAP
IoU和AP是对一个类别所计算的结果,mIoU和mAP是所有类结果的平均值。
原文:https://www.pianshen.com/article/20801175613/
目标检测的评价指标(TP、TN、FP、FN、Precision、Recall、IoU、mIoU、AP、mAP)的更多相关文章
- TP Rate ,FP Rate, Precision, Recall, F-Measure, ROC Area,
TP Rate ,FP Rate, Precision, Recall, F-Measure, ROC Area, https://www.zhihu.com/question/30643044 T/ ...
- TP 真阳性 TN FP FN
TP.True Positive 真阳性:预测为正,实际也为正 FP.False Positive 假阳性:预测为正,实际为负 FN.False Negative 假阴性:预测与负.实际为正 T ...
- 目标检测coco数据集点滴介绍
目标检测coco数据集点滴介绍 1. COCO数据集介绍 MS COCO 是google 开源的大型数据集, 分为目标检测.分割.关键点检测三大任务, 数据集主要由图片和json 标签文件组成. c ...
- 深度学习中目标检测Object Detection的基础概念及常用方法
目录 关键术语 方法 two stage one stage 共同存在问题 多尺度 平移不变性 样本不均衡 各个步骤可能出现的问题 输入: 网络: 输出: 参考资料 What is detection ...
- 目标检测的评价标准mAP, Precision, Recall, Accuracy
目录 metrics 评价方法 TP , FP , TN , FN 概念 计算流程 Accuracy , Precision ,Recall Average Precision PR曲线 AP计算 A ...
- 目标检测论文解读1——Rich feature hierarchies for accurate object detection and semantic segmentation
背景 在2012 Imagenet LSVRC比赛中,Alexnet以15.3%的top-5 错误率轻松拔得头筹(第二名top-5错误率为26.2%).由此,ConvNet的潜力受到广泛认可,一炮而红 ...
- CVPR2019目标检测方法进展综述
CVPR2019目标检测方法进展综述 置顶 2019年03月20日 14:14:04 SIGAI_csdn 阅读数 5869更多 分类专栏: 机器学习 人工智能 AI SIGAI 版权声明:本文为 ...
- CVPR2020论文介绍: 3D 目标检测高效算法
CVPR2020论文介绍: 3D 目标检测高效算法 CVPR 2020: Structure Aware Single-Stage 3D Object Detection from Point Clo ...
- 从TP、FP、TN、FN到ROC曲线、miss rate、行人检测评估
从TP.FP.TN.FN到ROC曲线.miss rate.行人检测评估 想要在行人检测的evaluation阶段要计算miss rate,就要从True Positive Rate讲起:miss ra ...
随机推荐
- Spring Boot 2.4版本前后的分组配置变化及对多环境配置结构的影响
前几天在<Spring Boot 2.4 对多环境配置的支持更改>一文中,给大家讲解了Spring Boot 2.4版本对多环境配置的配置变化.除此之外,还有一些其他配置变化,所以今天我们 ...
- python简单的函数应用
一个简单的函数应用,包括自定义函数,lambda函数,列表解析. 1 #!usr/bin/env python3 2 # -*- coding:utf-8 -*- 3 4 #开始定义函数 5 def ...
- Geoserver 谷歌瓦片地图的使用 多级发布
下面,我来介绍一下如何在离线的情况下,在Geoserver 中配置出如同谷歌地图般绚丽的效果. 为了让大家有动力看我我接下来写的东西,我先把结果图给大伙儿展现一下: 正如上图所示,该地图是谷歌第四级的 ...
- 爱普生 L4160 Serveies 网络打印机配置(问题解决)
一.爱普生网络打印机固定IP地址 用网络打印机过程中,偶尔会出现打印机脱机的状况,大多数原因是打印机的IP地址在路由器重启过后重新分配了IP地址导致的.此时,为了减少不必要的麻烦就需要固定打印机的IP ...
- 手把手教你搭饥荒专用服务器(三)—MOD及其他高级设置
友情链接: 手把手教你搭饥荒专用服务器(一)-服务器准备工作 手把手教你搭饥荒专用服务器(二)-环境配置及基本使用 手把手教你搭饥荒专用服务器(三)-MOD及其他高级设置 手把手教你搭饥荒专用服务器( ...
- Android 自定义构建类型 BuildType
简单介绍了 BuildType 定义在 app 项目与 module 项目的区别,以及在 Gradle 2.x 与 3.x 版本的区别. 最近接触到自定义构建类型 BuildType,发现这一块有些地 ...
- MyBatis-Plus 多表联查+分页
在写东西的过程中,多表联查和分页功能必不可少.当然,crud也很重要 但是又不想写代码和xml. 通过苦苦的查找.发现MyBatis-Plus一款国产的框架.优化了许多操作 本次主要记录一下,多表联查 ...
- spark:reducebykey与groupbykey的区别
从源码看: reduceBykey与groupbykey: 都调用函数combineByKeyWithClassTag[V]((v: V) => v, func, func, partition ...
- Jquery UI Autocomplete 在mvc中应用
首先添加引用 <link href="~/Content/themes/base/jquery-ui.css" rel="stylesheet" type ...
- Solon rpc 之 SocketD 协议
1. 简介 SocketD 是一种二进制的点对点通信协议,是一种新的网络通信第七层协议.旨在用于分布式应用程序中.从这个意义上讲,SocketD可以是RSocket等其他类似协议的替代方案.它的消息协 ...