【探索之路】机器人篇(4)-根据3D文件来优化自己的机器人模型
此章节不是必须做的!!!!
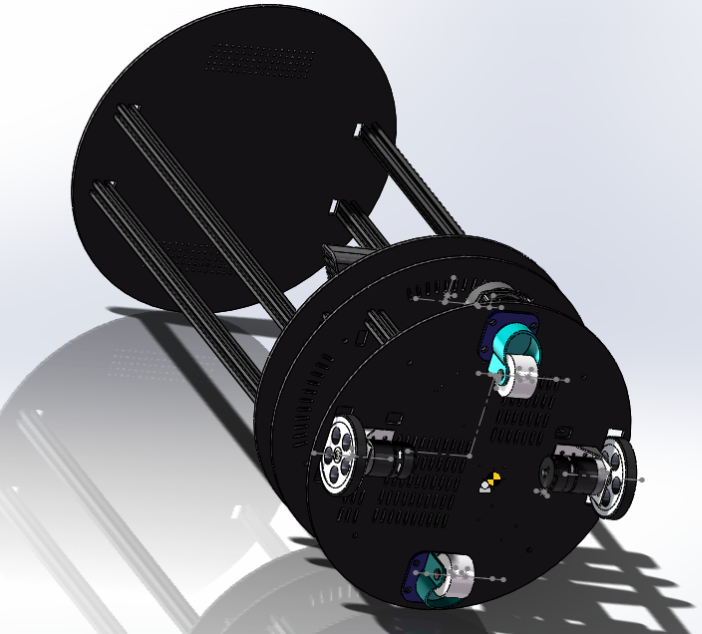
因为我已经用solidworks画了机器人的3D模型,那我就直接导入已经画好的三维模型。
如果大家没有画也是可以直接使用上一章节我们已经构建的机器人模型。我这里只是一个对显示的优化,不会影响后续功能的测试。
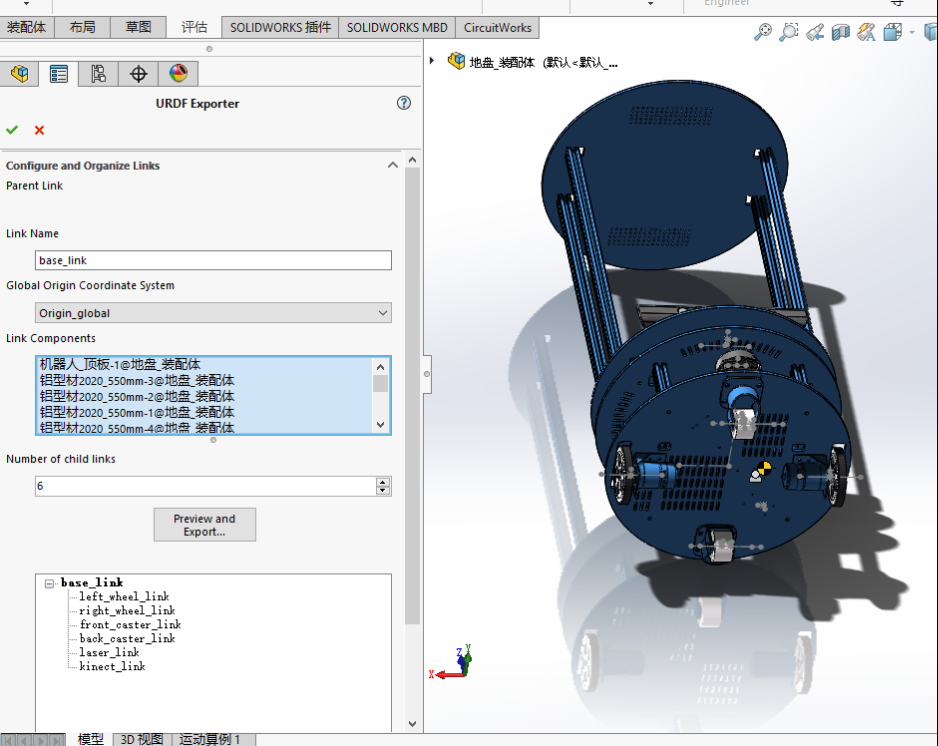
我们之前已经画好了三维模型,那么我们如何将solidworks中的模型导入到urdf中呢?我在百度上查到了solidworks有一个插件(sw2urdfSetup.exe),可以直接将三维模型生成ros的package。这个插件是ros提供的,但是在生成的package中有些配置是提供的模板,直接编译会报错,需要略微修改一下,具体修改教程我们可以搜索一下。
博文:【ROS学习】Solidworks模型转化为URDF文件格式+三连杆机械臂示例+逆运动学
这里我提醒一下,我使用的是solidworks 2017版。在上面的博文中,插件的file是在菜单栏中,而在我的软件中却在工具的标签下,这里需要注意一下。
而且在我实际的测试中,发现转轴可以不手动设置,它能自己识别并添加,但最好加上联动的方式,这样才能更好的识别。自动生成的坐标系的基准点有点儿乱,可以在软件自动生成之后手动修改一下。
在生成的ros的package中,发现urdf加载的stl模型文件,但是注意,这里的stl文件是通过sw2urdfSetup.exe插件生成的,如果直接将三维图像保存为STL格式的话是无法正常显示的。
我们可以看一下在solidworks中的界面。我刚刚重新对万向轮的3D图纸做了一下优化。

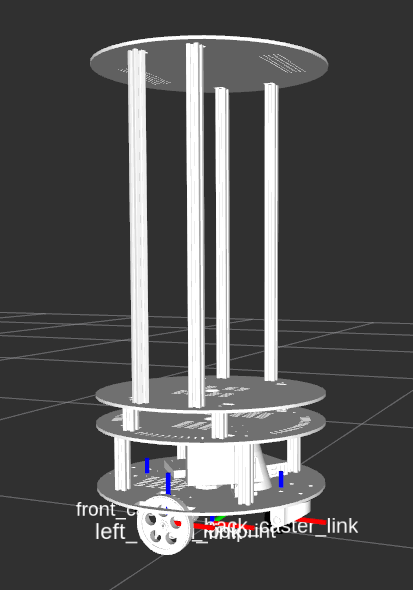
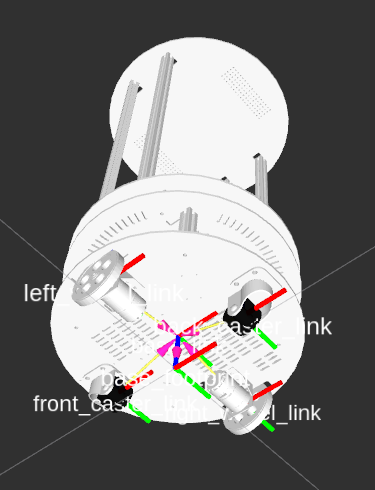
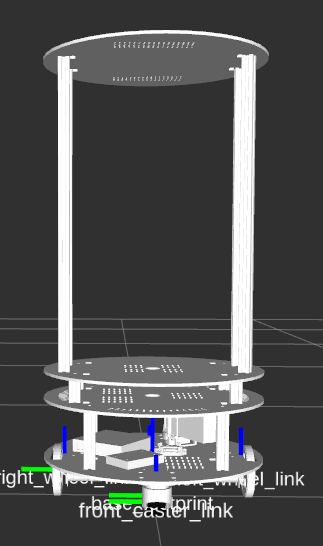
我们也可以在rviz中看一下效果。
目前,此版本的机械图纸和代码已经上传保存,编号是V4.
【探索之路】机器人篇(4)-根据3D文件来优化自己的机器人模型的更多相关文章
- 【探索之路】机器人篇(5)-Gazebo物理仿真环境搭建_让机器人运动起来
如果完成了前两步,那么其实我们已经可以去连接我们的现实中的机器人了. 但是,做机器人所需要的材料还没有到,所以我们这里先在电脑平台上仿真一下.这里我们用到的就算gazebo物理仿真环境,他能很好的和R ...
- 【探索之路】机器人篇(1)-ROS-mwRobot开篇
机器人的定义 首先,什么才是机器人?机器人是不是必须和人一样的外形?我们先看一看维基百科给机器人的定义: 由上可见,机器人并不是和人一样的外形,而是可以模拟人类行为或者思想再或者是模拟其他生物的机械. ...
- 【探索之路】机器人篇(3)-给mwRobot建立模型
在创建一个mwRobot_description程序包那一节中,我们添加了依赖roscpp rospy std_msgs 和 urdf , 现在我们再添加一个xacro依赖. 如何添加依赖? 打开程 ...
- 微服务探索之路02篇liunx ubuntu服务器部署k8s(kubernetes)-kubernetes/dashboard
本章介绍所需环境:ubuntu18.04,建立在上一篇微服务探索之路01篇已经安装了docker的基础上. 1 替换k8s镜像源为国内镜像 进入目录 cd /etc/apt/sources.list. ...
- 微服务探索之路03篇-docker私有仓库Harbor搭建+Kubernetes(k8s)部署私有仓库的镜像
❝ 目录: 微服务探索之路01篇.net6.0项目本地win10系统docker到服务器liunx系统docker的贯通 微服务探索之路02篇liunx ubuntu服务器部署k8s(kubernet ...
- 解剖SQLSERVER 第十六篇 OrcaMDF RawDatabase --MDF文件的瑞士军刀(译)
解剖SQLSERVER 第十六篇 OrcaMDF RawDatabase --MDF文件的瑞士军刀(译) http://improve.dk/orcamdf-rawdatabase-a-swiss-a ...
- Unity 3D 文件导入出错
Unity 3D 文件导入出错 安装unity 时我选择了free版的,打开已有项目时出现例如以下错误提示 解决的方法: 先把要导入的文件先复制到unity3d安装文件夹下相应的文件夹内,之后再返回u ...
- Linux入门篇(三)——文件与目录
这一系列的Linux入门都是本人在<鸟哥的Linux私房菜>的基础上总结的基本内容,主要是记录下自己的学习过程,也方便大家简要的了解 Linux Distribution是Ubuntu而不 ...
- (代码篇)从基础文件IO说起虚拟内存,内存文件映射,零拷贝
上一篇讲解了基础文件IO的理论发展,这里结合java看看各项理论的具体实现. 传统IO-intsmaze 传统文件IO操作的基础代码如下: FileInputStream in = new FileI ...
随机推荐
- day3(Vue组件)
1.组件定义 1.定义组件并引用 2.父组件向子组件传值 3.子组件向父组件传值 # 组件间传值:vuex (https://www.cnblogs.com/xiaonq/p/9697921.html ...
- 单调栈高封装模板hia hia hia
这个单调栈应该可以了,舒服舒服 #include <bits/stdc++.h> using namespace std; #define limit (400000 + 5)//防止溢出 ...
- 第8.9节 Python类中内置的查看直接父类的__bases__属性
终于介绍完了__init__方法和__new__方法,接下来轻松一下,本节介绍类中内置的__bases__属性. 一. 语法释义 Python 为所有类都提供了一个 bases 属性,通过该属性可以查 ...
- 第15.45节、PyQt输入部件:QKeySequenceEdit快捷键输入部件简介和使用案例
专栏:Python基础教程目录 专栏:使用PyQt开发图形界面Python应用 专栏:PyQt入门学习 老猿Python博文目录 老猿学5G博文目录 一.功能简介 Key Sequence Edit输 ...
- Python正则表达式re.search(r'\*{3,8}','*****')和re.search('\*{3,8}','*****')的匹配结果为什么相同?
老猿做过如下测试: >>> re.search(r'\*{3,100}','*****') <re.Match object; span=(0, 5), match='**** ...
- [GKCTF2020]CheckIN 注意了解多方面的东西
打开之后是这样的,没有发现反序列化函数,但是发现有一个@eval,想到了一句话,这是用base64进行传参首先传参phpinfo();看看,需要经过base64编码 http://e0cc90ac-d ...
- AtCoder Regular Contest 107(VP)
Contest Link Official Editorial 比赛体验良好,网站全程没有挂.题面简洁好评,题目质量好评.对于我这个蒟蒻来说非常合适的一套题目. A. Simple Math Prob ...
- Ionic学习记录
1.跨域问题 浏览器中的运行 当你运行 ionic serve 时发生了什么呢? 启动了一个本地 web 服务器 你的浏览器打开并定位到本地服务器地址 这让你看着你的应用加载到你电脑上一个浏览器里,地 ...
- centos 7系统安装mysql 8.0
一.关闭防火墙 [root@node01 ~]# systemctl disable firewalld [root@node01 ~]# systemctl stop firewalld [root ...
- ssh远程服务器不通
1.关闭防火墙 service iptables status service iptables stop 2.在/etc/hosts文件添加远程服务器信息(连接的两端都添加) 服务器1(racdb1 ...