论文阅读笔记(十二)【CVPR2018】:Exploit the Unknown Gradually: One-Shot Video-Based Person Re-Identification by Stepwise Learning
Introduction
(1)Motivation:
大量标记数据成本过高,采用半监督的方式只标注一部分的行人,且采用单样本学习,每个行人只标注一个数据。
(2)Method:
对没有标记的数据生成一个伪标签(pseudo labels),将标记的数据和部分伪标签的数据作为扩充数据集进行训练。
但这种方法引入了很多不可信的训练样本,制约了训练模型的性能。
(3)Contribution:
① 为了在单样本学习中更好的利用未标签数据,提出了步进学习方法EUG(Exploit the Unknown Gradually)。介绍如下:
通过单样本数据集训练CNN模型;
EUG迭代更新CNN模型,分为两步:
标签估计:对未标记数据生成伪标签,根据预测的可信度选择伪标签数据训练,
模型更新:使用扩充数据集对CNN重新训练。
② 采用基于距离的抽样准则进行标签估计和样本选择,显著提高了标签估计的性能。

The Progressive Model
(1)预备工作:
符号定义:
标记数据:L = {(x1, y1), ..., (xnl, ynl)}, |L| = nl
未标记数据:U = {(xnl+1), ..., (xnl+nu)}, |U| = nu
训练标记数据集的目标函数:
其中, Φ 表示一个嵌入函数,含有参数 θ,表示提取数据 xi 的特征(可视为CNN);
f 是一个含有参数 w 的函数,用于将 Φ 函数提取出的特征分类为 k 维的置信度估计(k表示行人的数量);
l 表示损失函数。
将未标记的数据考虑在内,单样本学习目标函数转为:
其中,yi^ 表示生成伪标签的第 i 个未标记数据;
si 属于 {0, 1},用于选择放进训练的未标记数据。
(2)框架:
提出一个步进学习方法来解决优化问题,即先优化 θ 和 w,再优化 y^ 和 s。
定义 S 为选择的伪标签的集合:
特征提取函数 Φ 采用一个带有时间平均池化的CNN模型ETAP-Net,该网络基于ResNet-50的架构,在分类层之前添加了全连接层和时间平均池化层。通过时间平均池化,每个tracklet包含的多个帧级特征转为tracklet级特征。在标签估计阶段,每个未标记的视频tracklet都会计算与已标记tracklet的距离,并将最近的数据进行伪标记。

(3)渐进式高效抽样策略:
① 抽样策略:如何保证抽选的伪标签样本的可靠性?
作者提出了一个动态的抽样策略,逐渐增加选择的伪标签样本数量。
② 抽样标准:对于单样本训练的行人重识别问题,什么才是一个高效的抽样标准?
作者提出了一个高效的抽样标准,采用了特征空间的距离度量(最近邻)来衡量可靠性。
具体策略如下:
对于每一个未标记数据,定义不相似度代价函数,其中 xi 属于 U:

设置第 t 次迭代的伪标签索引:
其中 mt 表示选择的伪标签集合的大小,迭代定义为:mt = mt-1 + p*nu,p为增量因子,属于(0, 1),控制伪标签集合的增长速度。
如何确定增量因子 p ?将 p 设置为一个很小的数值,使得 mt 在迭代中逐渐增大。
算法流程:

Experiments
(1)实验设置:
① 数据集:MARS和DukeMTMC
② 参数设置:momentum = 0.5,weight decay = 0.0005, batch size = 16, epochs = 70,lr = 0.1(前55个epochs),lr = 0.01(后15个epochs)
③ 数据处理:采用ImageNet进行预训练;每个tracklet选取16帧作为输入。
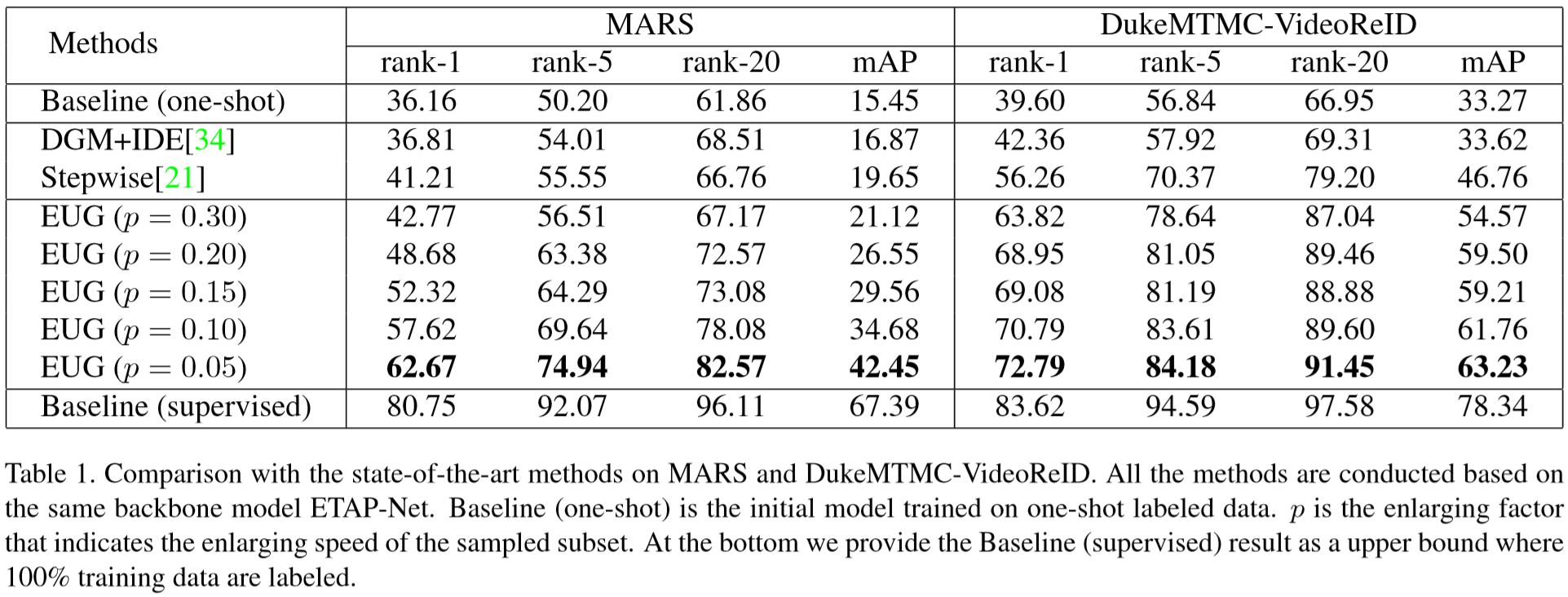
(2)实验结果:

其他读者的阅读笔记【传送门】
论文阅读笔记(十二)【CVPR2018】:Exploit the Unknown Gradually: One-Shot Video-Based Person Re-Identification by Stepwise Learning的更多相关文章
- 论文阅读笔记十二:Encoder-Decoder with Atrous Separable Convolution for Semantic Image Segmentation(DeepLabv3+)(CVPR2018)
论文链接:https://arxiv.org/abs/1802.02611 tensorflow 官方实现: https: //github.com/tensorflow/models/tree/ma ...
- 论文阅读笔记(二十一)【CVPR2017】:Deep Spatial-Temporal Fusion Network for Video-Based Person Re-Identification
Introduction (1)Motivation: 当前CNN无法提取图像序列的关系特征:RNN较为忽视视频序列前期的帧信息,也缺乏对于步态等具体信息的提取:Siamese损失和Triplet损失 ...
- 论文阅读笔记(二十二)【CVPR2017】:See the Forest for the Trees: Joint Spatial and Temporal Recurrent Neural Networks for Video-based Person Re-identification
Introduction 在视频序列中,有些帧由于被严重遮挡,需要被尽可能的“忽略”掉,因此本文提出了时间注意力模型(temporal attention model,TAM),注重于更有相关性的帧. ...
- 论文阅读笔记(二十)【AAAI2019】:Spatial and Temporal Mutual Promotion for Video-Based Person Re-Identification
Introduction (1)Motivation: 作者考虑到空间上的噪声可以通过时间信息进行弥补,其原因为:不同帧的相同区域可能是相似信息,当一帧的某个区域存在噪声或者缺失,可以用其它帧的相同区 ...
- 论文阅读笔记十八:ENet: A Deep Neural Network Architecture for Real-Time Semantic Segmentation(CVPR2016)
论文源址:https://arxiv.org/abs/1606.02147 tensorflow github: https://github.com/kwotsin/TensorFlow-ENet ...
- 论文阅读笔记十四:Decoupled Deep Neural Network for Semi-supervised Semantic Segmentation(CVPR2015)
论文链接:https://arxiv.org/abs/1506.04924 摘要 该文提出了基于混合标签的半监督分割网络.与当前基于区域分类的单任务的分割方法不同,Decoupled 网络将分割与分类 ...
- 【学习笔记】Vins-Mono论文阅读笔记(二)
估计器初始化简述 单目紧耦合VIO是一个高度非线性的系统,需要在一开始就进行准确的初始化估计.通过将IMU预积分与纯视觉结构进行松耦合对齐,我们得到了必要的初始值. 理解:这里初始化是指通过之前imu ...
- 论文阅读笔记十九:PIXEL DECONVOLUTIONAL NETWORKS(CVPR2017)
论文源址:https://arxiv.org/abs/1705.06820 tensorflow(github): https://github.com/HongyangGao/PixelDCN 基于 ...
- 论文阅读笔记十六:DeconvNet:Learning Deconvolution Network for Semantic Segmentation(ICCV2015)
论文源址:https://arxiv.org/abs/1505.04366 tensorflow代码:https://github.com/fabianbormann/Tensorflow-Decon ...
- 论文阅读笔记十五:Pyramid Scene Parsing Network(CVPR2016)
论文源址:https://arxiv.org/pdf/1612.01105.pdf tensorflow代码:https://github.com/hellochick/PSPNet-tensorfl ...
随机推荐
- php curl 相关知识
整理了下curl $ch = curl_init(); # 设定url和把结果返回,是否返回头部 curl_setopt($ch, CURLOPT_URL, 'http://www.baidu. ...
- 不重启 清空tomcat日志
1.重定向方法清空文件 [root@localhost logs]# du -h catalina.out 查看文件大小17M catalina.out[root@localhost logs]# ...
- Nodejs中,path.join()和path.resolve()的区别
在说path.join()和path.resolve()的区别之前,我先说下文件路径/和./和../之间的区别 /代表的是根目录: ./代表的是当前目录: ../代表的是父级目录. 然后再来说下pat ...
- vue路由--命名路由
有时我们通过一个名称来标识一个路由显得更方便一些,特别是在链接一个路由,或者是执行一些跳转的时候.你可以在创建 Router 实例的时候,在 routes 配置中给某个路由设置名称. 我们直接在路由下 ...
- 10分钟快速搭建可用的springboot-web项目
搭建步骤 工具准备 1. IntelliJ IDEA(开发工具,简称idea) 2. JDK1.8+ 3. MAVEN 4. mysql(数据库) 5. redis(session储存) 创建步骤 S ...
- MySQL基础(4) | 视图
MySQL基础(4) | 视图 基本语法 1.创建 CREATE VIEW <视图名> AS <SELECT语句> 语法说明如下. <视图名>:指定视图的名称.该名 ...
- Mac-MacOS降级(Mac系统降级,系统回退)
前言 最近把macOS更新到了 macOS Catalina,使用了一段时间后,结合自己的使用环境和体验,感觉 Catalina 不太好用,就想把系统回退到 macOS Mojave,但是平时几乎不用 ...
- 装饰器(Python)
装饰器(decorators)是 Python 的一个重要部分.简单地说:装饰器是修改其他函数的功能的函数,能让我们的代码更容易被扩展,更加简短.举个例子: def login(): print(&q ...
- springBoot进阶02
SpringBoot进阶02 1. 日志的使用 1.1 基本使用 /** * 获取日志记录器 */ Logger logger = LoggerFactory.getLogger(this.getCl ...
- python基础入门之一 —— 变量与运算符
1.标识符 由数字,字母,下划线组成 不能由数字开头 不能使用内置关键字 严格区分大小 2.数据类型 数值:int (整型) float(浮点型) 布尔型:True(真) False(假) str ( ...