基于SLAM的移动机器人硬件设备参数
1、移动机器人底盘
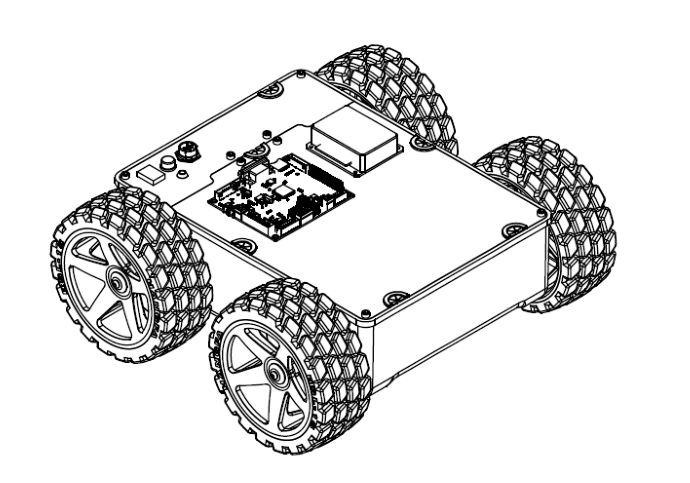
移动底盘有多大
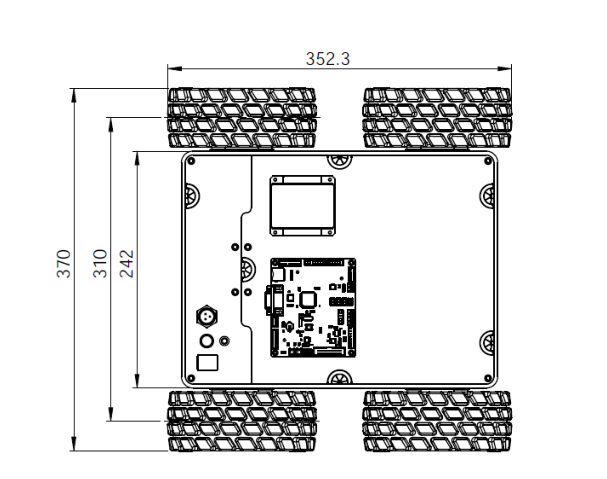
长宽高:35*35*40cm
移动底盘有多重
17kg
底盘最大载重是多少
40kg
底盘最大速度是多少
1.2m/s
底盘的电池是多大
24V/7.8A 锂离子电池
底盘能够续航多久
8小时(负载5kg,运行速度1m/s)
底盘是由哪些部分组成
驱动电机 控制板 编码器 锂电池 分线盘 轮子
底盘是如何进行二次开发的
通过RS232总线或CAN总线可以和运动控制板连接
2、STM32F429IGT6
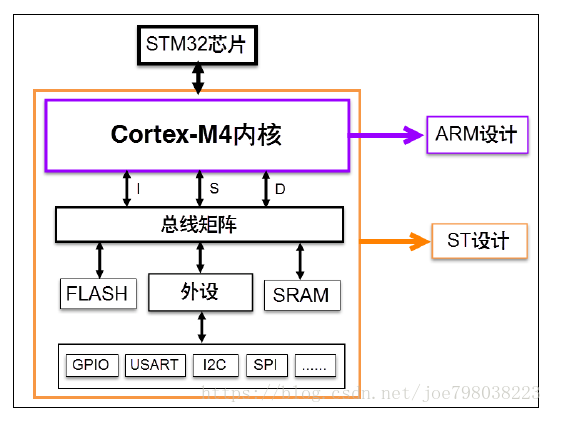
芯片内核 ARM Cortex-M4内核
有多少个管脚
176个管脚
芯片内置存储空间
1M FLASH 256KB SRAM(静态随机存储器)
外扩的存储空间
SDRAM:32MB
NAND FLASH:512MB
SPI FLASH:32M
EEPROM:256K
系统频率有多快
180Mhz
有哪些外设资源
串口
IIC
SPI
CAN
定时器中断
外部中断
网口
处理器是什么内核
Cortex M4 内核
运行的是单任务程序,没有跑操作系统
有一个LCD彩屏
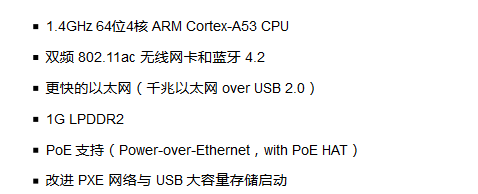
3、树莓派3b+
参考网址:http://shumeipai.nxez.com/2018/03/14/raspberry-pi-3-model-bplus-sale-now.html
http://m.elecfans.com/article/620717.html
外设:
4个USB口,可接鼠标、键盘、U盘
1个以太网口
内置wifi模块
支持蓝牙
1个HDMI高清视频输出接口
1个音频输出口
1G的内存
microSD卡作为树莓派的硬盘
运行环境
操作系统为Linux
版本号为:ubuntu 16.04
处理器是什么型号
BCM2837
处理器有多少个管脚
引出了40个GPIO口
其中包括串口的RX和TX引脚,通过这两个串口引脚可以与STM32进行连接
处理器的系统频率有多快
1.4GHz
处理器是什么内核
64位 4核 ARM Cortex-A53 内核
处理器有哪些外设资源
12个16位定时器
2个32位定时器
2个DMA控制器
6个SPI
2个全双工I2S
1个SAI
3个IIC
8个串口
2个USB
2个CAN
3个12位的ADC
2个12位的DAC
1个RTC
1个SDIO
1个FMC
1个TFTLCD控制器
1个10/100M以太网
1个摄像头接口
140个通用IO口
IIC
uart
外部扩展接口
网口
2个microUSB接口
1个USB接口
RS232接口(一公一母)
RS485接口
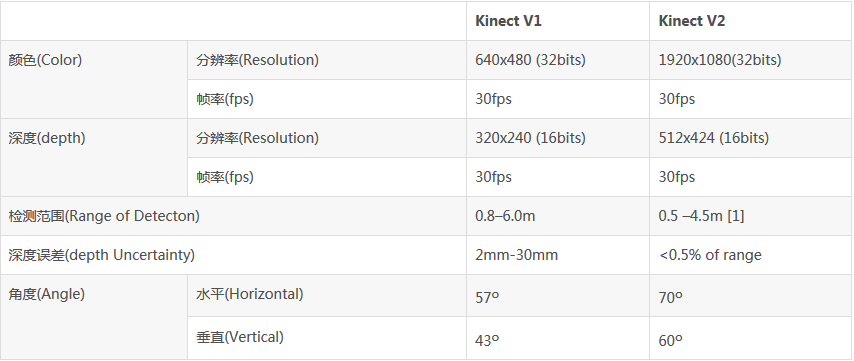
4、Kinect摄像头
参考
https://blog.csdn.net/u012062327/article/details/51444158
该摄像头是第几代
微软第一代摄像头
外观

摄像头的结构组成
摄像头由一个彩色摄像头(中间)和一个深度传感器组成
深度传感器主要由一个红外线投射器(左边)和光斑接收器组成(右边),将返回的光斑与参考光斑进行对比,利用三角测量原理计算物体的三位空间信息。
如何对这个摄像头进行开发
可以在Windows环境下,
用C++语言,VS编译器
开发环境是什么样的
Windows 或 Linux ROS
编程语言是什么
C++
IDE是什么
通过这个摄像头能够获得哪些信息
深度信息 RGB彩色信息
其他的一些信息
5、激光雷达
使用这款激光雷达的参考网址:https://blog.csdn.net/WisdomXLH/article/details/80547669
参考网址:https://blog.csdn.net/weixin_44046400/article/details/85174704

这款激光雷达的参数
最小检测距离为0.15米,最远检测距离为12米
扫描角度为0-360°
扫描频率为5-15hz 也就是每秒能转5支15圈
角度分辨率 0.45° -1.35° 典型值为0.9° 也就是每圈能采集800个点,如果频率为10hz的话,每秒钟能采集8000个点。
通过这个激光雷达能获得哪些信息
如何对这个激光雷达进行开发
开发环境是什么样的
编程语言是什么
IDE是什么
6、GPS模块
GPS模块的型号是什么
GPS的精度是多大
10米
GPS如何与开发板进行连接
通过串口连接
GPS模块能获得哪些信息
经纬度 海拔 时间 加速度 连接的卫星数
7、IMU模块
IMU模块的型号是什么
MPU9250
IMU模块能获得哪些信息
加速度
角度
方位
IMU的精度是多大
IMU模块如何与开发板连接
通过IIC总线与控制板连接
8、GPRS模块
GPRS模块的型号是什么
该模块通过什么协议传输数据
TCP UDP
该模块如何与开发板连接
通过串口连接
基于SLAM的移动机器人硬件设备参数的更多相关文章
- 基于ROS_Arduino室内移动机器人SLAM实验测试
纯手工搭建的机器人,因此外观并不美. 基于ROS(indigo)以及Arduino等搭建软硬件平台,包括语音.视觉.激光.码盘等传感器设备. 整体如下图所示: 底盘特写: 语音输入: Arduino模 ...
- 嵌入式大赛PPT
题目:基于SLAM的移动机器人设计 嵌入式PPT应具有的几个部分 1.有哪些硬件 1)小车 2)STM32F429开发板 3)树莓派3b+开发板 4)4g通信模块 5)GPS模块 6)Kinect摄像 ...
- Slam(即时定位与地图构建) 知识篇
Slam即时定位与地图构建 技术解释 同步定位与地图构建(SLAM或Simultaneous localization and mapping)是一种概念:希望机器人从未知环境的未知地点出发,在运动过 ...
- SLAM(二)----学习资料下载
有位师兄收集了很多slam的学习资料, 做的很赞, 放到了github上, 地址:https://github.com/liulinbo/slam.git ruben update 0823 2016 ...
- AR中的SLAM(一)
写在前面 本系列打算讲讲个人对AR行业和AR中的SLAM算法的一点浅显的看法.才疏学浅,文中必然有很多疏漏和不足,还望能和大家多多讨论.今天先讲讲我对AR的一些认识. AR的一点理解 AR是什么 AR ...
- SLAM方向公众号、知乎、博客上有哪些大V可以关注?
一.公众号 泡泡机器人:泡泡机器人由一帮热爱探索并立志推广机器人同时定位与地图构建(SLAM)技术的极客创办而成,通过原创文章.公开课等方式分享SLAM领域的数学理论.编程实践和学术前沿. 经典文 ...
- 【转】基于laravel制作APP接口(API)
这篇文章主要介绍了基于laravel制作APP接口(API)的相关资料,需要的朋友可以参考下 前期准备 前言,为什么做以及要做个啥本人姓小名白,不折不扣编程届小白一名,但是自从大一那会儿接触到编程这件 ...
- 基于KVM的虚拟化研究及应用
引言 虚拟化技术是IBM在20世纪70年代首先应用在IBM/370大型机上,这项技术极大地提高了大型机资源利用率.随着软硬件技术的迅速发展,这项属于大型机及专利的技术开始在普通X86计算机上应用并成为 ...
- ubuntu查看硬件信息
1,外部探针probe sudo apt-get install hwinfo 执行hwinfo获取系统信息 --short
随机推荐
- EAC3 enhanced channel coupling
Enhanced channel coupling是一种spatial coding 技术,在传统的channel coupling的基础上添加了phase compensation, de-corr ...
- (c#)拼写单词
题目 解
- Python记:索引操作示例:将以数指定年,月,日的日期打印出来
————————————————————————————————————不要停止奔跑,不要回顾来路,来路无可眷恋,值得期待的只有前方. months=[ 'January', 'February', ...
- Codeforces 131C . The World is a Theatre(打表组合数)
题目链接:http://codeforces.com/contest/131/problem/C 大意就是有n个男孩,m个女孩,从男孩中选不少于4个男孩,女孩中选不少于1个女孩,组成人数为t的队伍,问 ...
- 微信公众号获取access_token
一般我们在进行微信公众号开发的时候,都需要用到access_token,但是具体的获取及其使用方式如何呢?下面展示一种获取的方式(具体的微信公众号申请和配置,请参考开放文档,具体在这里就不详细说明了) ...
- css动画 自动打字,让你的文字飞舞起来
自动打字的效果 非一般的炫酷 <!DOCTYPE html> <html lang="en"> <head> <meta charset= ...
- 记一次if控制器的使用
1.添加if控制器 2.输入判断条件:常见的就是某个变量是不是等于某个值 3.或者用函数助手中的函数 每个版本jmeter函数助手的入口不同,我的直接在菜单上: 选择__jexl3,输入判断条件,点击 ...
- 《一句话理解Vue核心内容》阅读笔记
Vue.js(读音 /vjuː/,类似于 view) 是一套构建用户界面的渐进式框架. 在解释什么是渐进式框架之前,有必要了解一下什么是框架 在最初的前端开发中,我们利用JS获取HTML中的DOM元素 ...
- 每天进步一点点------CORDIC (一)
三角函数计算,Cordic 算法入门 三角函数的计算是个复杂的主题,有计算机之前,人们通常通过查找三角函数表来计算任意角度的三角函数的值.这种表格在人们刚刚产生三角函数的概念的时候就已经有了,它们通常 ...
- C语言中二维数组如何申请动态分配内存
C语言中二维数组如何申请动态分配内存: 使用malloc函数,先分配第一维的大小,然后再循环分配每一维的大小 #include <stdio.h> #include <malloc. ...