Coursera self-driving2, State Estimation and Localization Week3, GNSS IMU for pose estimation
如何表示旋转?三种方法
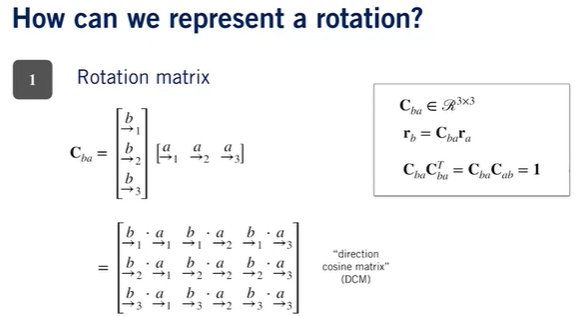
1. rotation matrix
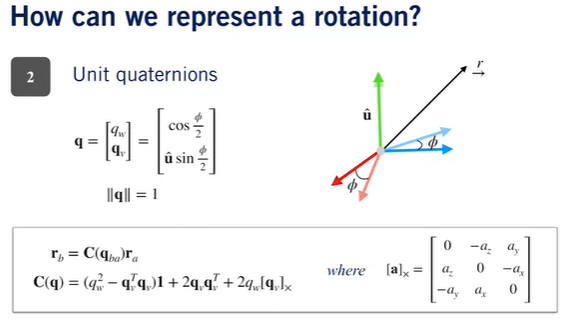
2. unit quaternions 四元数
3. Euler angles

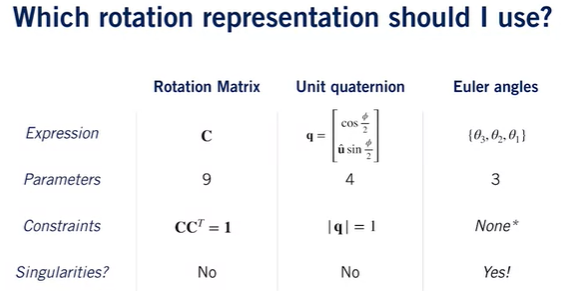
4. compare
坐标系
ECIF - Earth-Centered Inertial Frame, 用于太空空间,如卫星
ECEF - Earth-Centered Eearth-Fixed Frame, 用于太空空间,如卫星
NED - North East Down, NEU - North East Up, 用于导航Navigation
Sensor Frame
IMU - Inertial Measurement Unit
包含了两个组件,加速度计 和 陀螺仪。 IMU的例子有基于手机的计步,还有用于增强现实设备
GNSS
GPS 是最常用的一种,还有我国的北斗
Coursera self-driving2, State Estimation and Localization Week3, GNSS IMU for pose estimation的更多相关文章
- 论文笔记 Stacked Hourglass Networks for Human Pose Estimation
Stacked Hourglass Networks for Human Pose Estimation key words:人体姿态估计 Human Pose Estimation 给定单张RGB ...
- paper 154:姿态估计(Hand Pose Estimation)相关总结
Awesome Works !!!! Table of Contents Conference Papers 2017 ICCV 2017 CVPR 2017 Others 2016 ECCV 20 ...
- 论文笔记: Mutual Learning to Adapt for Joint Human Parsing and Pose Estimation
Mutual Learning to Adapt for Joint Human Parsing and Pose Estimation 2018-11-03 09:58:58 Paper: http ...
- (转)Awesome Human Pose Estimation
Awesome Human Pose Estimation 2018-10-08 11:02:35 Copied from: https://github.com/cbsudux/awesome-hu ...
- 手势估计- Hand Pose Estimation
http://blog.csdn.net/myarrow/article/details/51933651 1. 目前进展 1.1 相关资料 1)HANDS CVPR 2016 2 ...
- human pose estimation
2D Pose estimation主要面临的困难:遮挡.复杂背景.光照.真实世界的复杂姿态.人的尺度不一.拍摄角度不固定等. 单人姿态估计 传统方法:基于Pictorial Structures, ...
- Social Grouping for Multi-Target Tracking and Head Pose Estimation in Video(翻译)
0 - ABSTRACT 许多计算机任务在缺少上下文信息的情况下的处理会更加困难.例如,在多相机跟踪任务下,行人可能在不同照相机下面因为有这不同的姿势和灯光条件而看起来很不一样.类似地,在低分辨率高角 ...
- 论文阅读理解 - Stacked Hourglass Networks for Human Pose Estimation
http://blog.csdn.net/zziahgf/article/details/72732220 keywords 人体姿态估计 Human Pose Estimation 给定单张RGB图 ...
- caffe openpose/Realtime Multi-Person 2D Pose Estimation using Part Affinity Fields配置(转)
Realtime Multi-Person 2D Pose Estimation using Part Affinity Fields 是CVPR2017的一篇论文,作者称是世界上第一个基于深度学习的 ...
- Towards Accurate Multi-person Pose Estimation in the Wild 论文阅读
论文概况 论文名:Towards Accurate Multi-person Pose Estimation in the Wild 作者(第一作者)及单位:George Papandreou, 谷歌 ...
随机推荐
- python subprocess读取终端输出内容
参考链接:https://www.cnblogs.com/songzhenhua/p/9312718.html https://www.cnblogs.com/darkchii/p/9013673.h ...
- Spring之拦截器和过滤器
Spring拦截器 拦截器简介 Spring拦截器是一种基于AOP的技术,本质也是使用一种代理技术,它主要作用于接口请求中的控制器,也就是Controller. 因此它可以用于对接口进行权限验证控制. ...
- 在 DjangoStarter 中集成 TailwindCSS
前言 好久没有更新技术文章了 这个月开箱和随笔倒是写了不少,又忙又懒的 基础的文章不太想写,稍微深入一点的又需要花很多时间来写 虽然但是,最终还是想水一篇 最近做了一个基于 wagtail 的项目,有 ...
- VS Code 开发统一代码格式化配置
eslint: 是用来做代码风格检查的,比较关注代码质量,并且会提示不符合风格规范的代码,也有一部分代码格式化的功能.不是消除空行. "editor.formatOnSave": ...
- 数据仓库建模工具之一——Hive学习第三天
1.Hive的基本操作 1.1 Hive库操作 1.1.1 创建数据库 1)创建一个数据库,数据库在HDFS上的默认存储路径是/hive/warehouse/*.db. create database ...
- C# 使用模式匹配的好处,因为好用所以推荐~
类型检查和转换:当你需要检查对象是否为特定类型,并且希望在同一时间内将其转换为那个类型时,模式匹配提供了一种更简洁的方式来完成这一任务,避免了使用传统的as和is操作符后还需要进行额外的null检查. ...
- C# 算术表达式求值(后缀法),看这一篇就够了
一.种类介绍 算术表达式有三种:前缀表达式.中缀表达式和后缀表达式.一般用的是中缀,比如1+1,前后缀就是把操作符移到前面和后面,下面简单介绍一下这三种表达式. 1.前缀表示法 前缀表示法又叫波兰表示 ...
- CCF 命令行选项
题目原文 问题描述(题目链接登陆账号有问题,要从这个链接登陆,然后点击"模拟考试",进去找本题目) 试题编号: 201403-3 试题名称: 命令行选项 时间限制: 1.0s ...
- Linux Kernel CFI机制简介及测试禁用
PS:要转载请注明出处,本人版权所有. PS: 这个只是基于<我自己>的理解, 如果和你的原则及想法相冲突,请谅解,勿喷. 环境说明 无 前言 当我们为android移植linux ...
- python高性能计算:cython使用openmp并行(示例)
y.pyx import cython from cython import parallel from cython.parallel import prange cdef int i cdef i ...