树莓派CM4(四):树莓派镜像替换内核
树莓派镜像替换内核
1. 为什么要替换内核
树莓派官方提供的镜像中,自带的内核版本为
6.6.31然而
github上提供的内核源码为6.6.40,有些微差别此外,后续很有可能进行内核裁剪定制等工作,替换内核是一个绕不过的工作
2. 获取内核源码
github地址:选择使用
6.6.y版本的内核
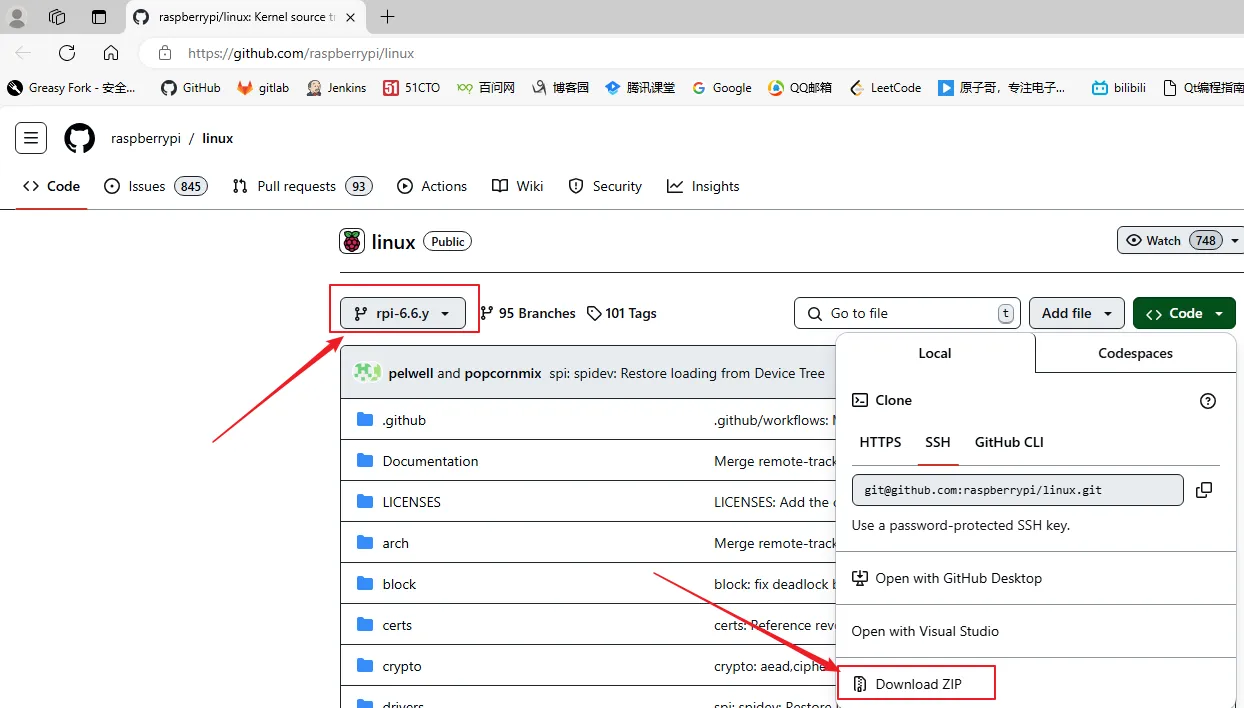
将其拷贝到
ubuntu中解压
$ unzip linux-rpi-6.6.y.zip
进入内核源码目录
$ cd linux-rpi-6.6.y
3. 获取交叉编译工具链
我所选用树莓派镜像中的
gcc版本为12.2.0为了避免出现
glibc版本不一致的问题,同样使用12.2.0版本的交叉编译工具链下载地址:
https://developer.arm.com/downloads/-/arm-gnu-toolchain-downloads

4. 内核编译
修改顶层
Makefile,指定目标平台ARCH和交叉编译工具链CROSS_COMPILE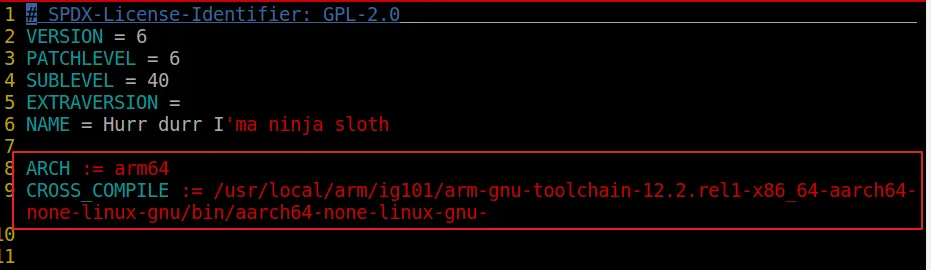
树莓派CM4使用的时博通BCM2711的方法,因此使用
bcm2711_defconfig生成默认配置文件linux-rpi-6.6.y$ make bcm2711_defconfig
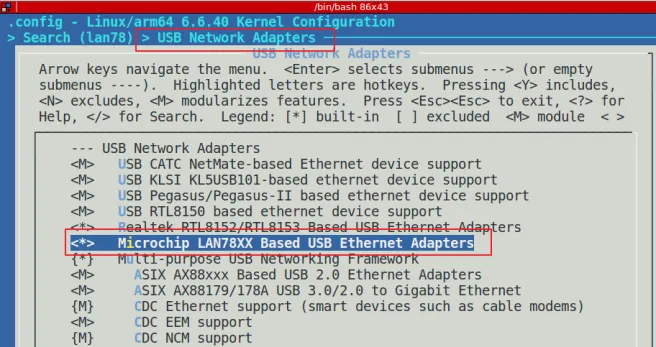
menuconfig配置linux-rpi-6.6.y$ make menuconfig
在这里我需要将
LAN78XX驱动直接编译进内核,不作为外部模块
开始编译,内核镜像/驱动模块/设备树都需要编译,使用
-j$(nproc)全核编译,加快编译速度linux-rpi-6.6.y$ make Image modules dtbs -j$(nproc)
5. 挂载树莓派镜像到Ubuntu
- 选择使用使用树莓派最新的镜像
Raspberry Pi OS Lite,镜像下载地址
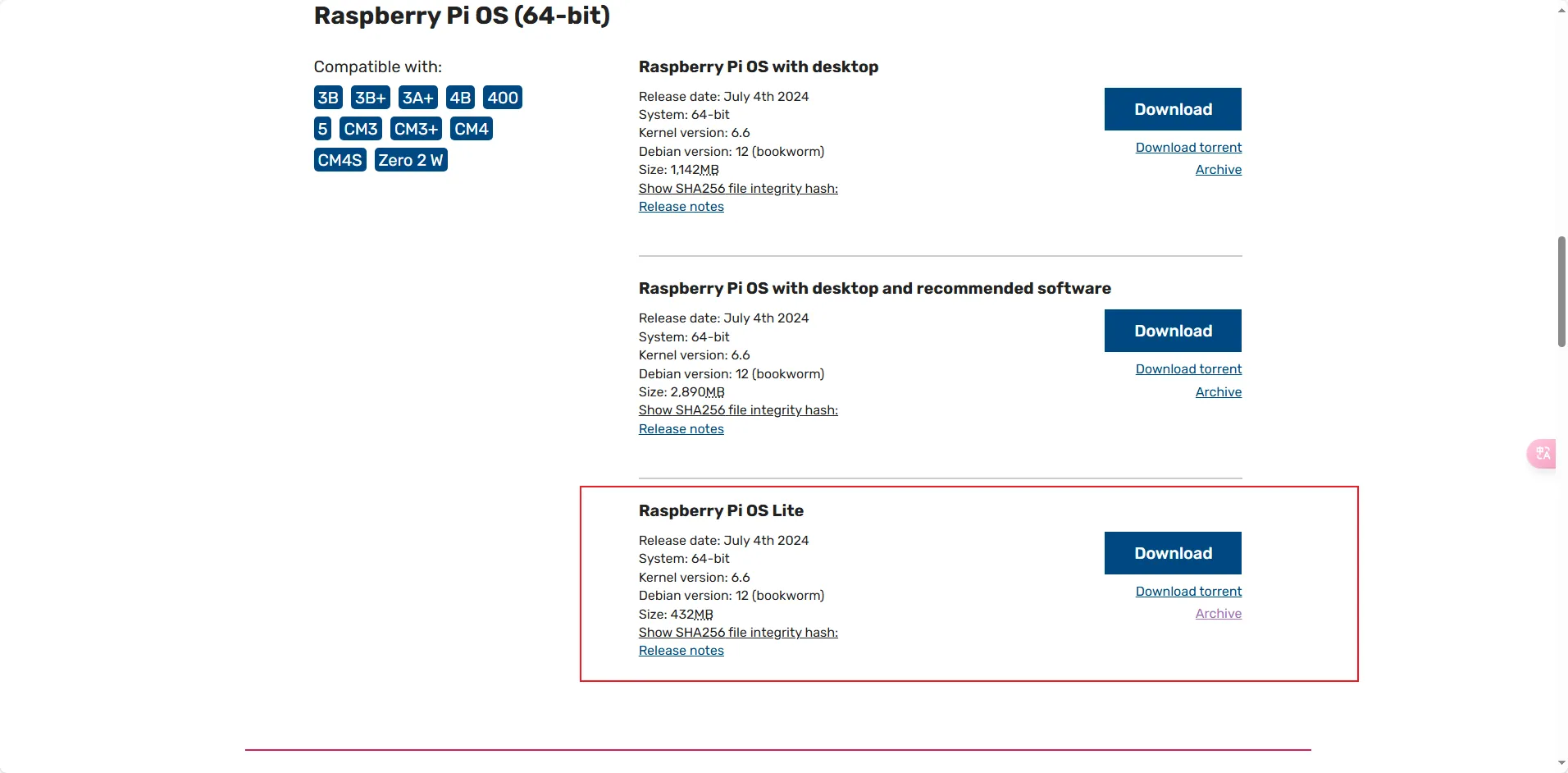
解压,得到
*.img的镜像文件挂载镜像到Ubuntu
# .img镜像
jun@ubuntu:$ ls
2024-07-04-raspios-bookworm-arm64-lite.img # 查看第一个未使用的回环设备
jun@ubuntu:$ losetup -f
/dev/loop0 # 将.img镜像关联到回环设备
jun@ubuntu:$ sudo losetup /dev/loop0 2024-07-04-raspios-bookworm-arm64-lite.img
[sudo] password for jun: # 查看分区,检测到两个区,其中较小的是系统分区,较大的是根文件系统
jun@ubuntu:$ sudo kpartx -av /dev/loop0
add map loop0p1 (253:0): 0 1048576 linear 7:0 8192
add map loop0p2 (253:1): 0 4481024 linear 7:0 1056768 # 创建系统分区挂载目录
jun@ubuntu:$ mkdir boot # 创建根文件系统挂载目录
jun@ubuntu:$ mkdir rootfs # 挂载系统分区
jun@ubuntu:$ sudo mount /dev/mapper/loop0p1 ./boot/ # 挂载根文件系统
jun@ubuntu:$ sudo mount /dev/mapper/loop0p2 ./rootfs/ # 查看系统分区
jun@ubuntu:$ ls ./boot/
bcm2710-rpi-2-b.dtb bcm2710-rpi-zero-2-w.dtb bcm2711-rpi-cm4s.dtb bootcode.bin fixup4db.dat fixup_x.dat kernel8.img start4.elf start_x.elf
bcm2710-rpi-3-b.dtb bcm2711-rpi-400.dtb bcm2712d0-rpi-5-b.dtb cmdline.txt fixup4x.dat initramfs_2712 LICENCE.broadcom start4x.elf
bcm2710-rpi-3-b-plus.dtb bcm2711-rpi-4-b.dtb bcm2712-rpi-5-b.dtb config.txt fixup_cd.dat initramfs8 overlays start_cd.elf
bcm2710-rpi-cm3.dtb bcm2711-rpi-cm4.dtb bcm2712-rpi-cm5-cm4io.dtb fixup4cd.dat fixup.dat issue.txt start4cd.elf start_db.elf
bcm2710-rpi-zero-2.dtb bcm2711-rpi-cm4-io.dtb bcm2712-rpi-cm5-cm5io.dtb fixup4.dat fixup_db.dat kernel_2712.img start4db.elf start.elf # 查看根文件系统
jun@ubuntu:$ ls ./rootfs/
bin boot dev etc home lib lost+found media mnt opt proc root run sbin srv sys tmp usr var
6. 安装新内核
进入内核源码目录
安装内核模块到根文件系统
linux-rpi-6.6.y$ sudo env PATH=$PATH make INSTALL_MOD_PATH=../rootfs modules_install

安装头文件到根文件系统的
usr目录linux-rpi-6.6.y$ sudo make headers_install INSTALL_HDR_PATH=../rootfs/usr/
安装
Image到挂载的boot分区linux-rpi-6.6.y$ sudo cp arch/arm64/boot/Image ../boot/kernel8.img
安装设备树文件
linux-rpi-6.6.y$ sudo cp arch/arm64/boot/dts/broadcom/*.dtb ../boot/
linux-rpi-6.6.y$ sudo cp arch/arm64/boot/dts/overlays/*.dtb* ../boot/overlays/
替换
version.hlinux-rpi-6.6.y$ sudo cp include/generated/uapi/linux/version.h ../rootfs/usr/include/linux/version.h
7. 解决内核模块无法加载的问题
进入
rootfs根文件系统中的驱动存放目录linux-rpi-6.6.y$ cd ./rootfs/lib/modules/6.6.40-v8/
查找.ko文件,发现没有任何内核模块
6.6.40-v8$ find . -name *ko
检查发现,该目录下有很多
.ko.xz文件,原因是make module_install命令执行时,自动将.ko文件进行了压缩,但是这样会导致内核启动时无法加载模块,需要将压缩的.ko文件进行解压编写脚本
modules_install.sh用来在系统第一次开机时生成modules.dep文件,将该脚本存放在rootfs/lib/modules/6.6.40-v8/目录下,脚本内容如下#!/bin/bash # modules path
MODULES_PATH=/lib/modules/$(uname -r) # 解压*.ko.xz文件
module_decompress()
{
MODULES_XZ_FILES=`find ${MODULES_PATH} -name *ko.xz` for MODULE in ${MODULES_XZ_FILES}
do
set -x
xz -dk ${MODULE}
set +x
done return 0
} RET=$(cat ${MODULES_PATH}/modules.dep)
if [ -z "${RET}" ]; then # modules decompress
module_decompress # generate modules.dep
depmod # make sure this script executed only once
SCRIPT_NAME=$(basename $0)
sed -i "/$SCRIPT_NAME/d" /etc/rc.local # reboot
reboot
else
echo "modules already installed!"
fi exit 0
给脚本以可执行权限
6.6.40-v8$ sudo chmod 777 modules_install.sh
在根文件系统下的
etc/rc.local中添加如下内容,使module_install.sh脚本开机自启动# modules_install
/bin/bash /lib/modules/$(uname -r)/modules_install.sh &
8. 选择内核
- 修改
boot分区下的config.txt,$ sudo vi ./boot/config.txt
- 在文件末尾添加如下内容,表示使用新的内核启动
kernel=kernel8.img
9. 取消镜像挂载
- 取消
5. 挂载树莓派镜像到Ubuntu的镜像挂载jun@ubuntu:$ ls
2024-07-04-raspios-bookworm-arm64-lite.img boot rootfs
jun@ubuntu:$ sudo umount ./boot
jun@ubuntu:$ sudo umount ./rootfs
jun@ubuntu:$ sudo losetup -d /dev/loop0
10. 镜像烧录
- 参考之前的文档;《树莓派CM4(一):镜像烧录》
11. 开机
- 首次开机时,系统会自动重启两次,属正常现象
- 查看内核版本,内核版本为
6.6.40, 内核替换成功# uname -a
Linux IG-210 6.6.40-v8 #2 SMP PREEMPT Tue Aug 27 14:04:24 CST 2024 aarch64 GNU/Linux
树莓派CM4(四):树莓派镜像替换内核的更多相关文章
- 【树莓派】使用树莓派制作img镜像(一)
最近一直在折腾树莓派,前几天装了10台设备,最近又来了15台开发板子.基本每台设备都需要进行如下操作: 1.安装树莓派OS,并配置键盘.时区.语言编码格式等: 2.新增组.用户.配置静态IP地址: 3 ...
- 【树莓派】制作树莓派最小镜像:img裁剪瘦身
制作树莓派镜像,可以参考这篇文章:http://blog.csdn.net/talkxin/article/details/50456282 摘录部分要点内容如下(如果作者不允许转载,请联系即删除): ...
- 【树莓派】制作树莓派所使用的img镜像(一)
最近一直在折腾树莓派,前几天装了10台设备,最近又来了15台开发板子.基本每台设备都需要进行如下操作: 1.安装树莓派OS,并配置键盘.时区.语言编码格式等: 2.新增组.用户.配置静态IP地址: 3 ...
- [原创]树莓派CM4配置GPIO复用为i2c
1.简介 项目中需要控制各种外设的电源,正常应该是通过GPIO进行控制,但是树莓派CM4的GPIO管脚有限,因此需要使用i2c扩展IO 查阅CM4-datesheet发现GPIO22和GPIO23可以 ...
- 树莓派3B/3B+ 清华镜像系统和安装中文输入法Fcitx及Google拼音输入法
你还在为树莓派无法安装中文输入法而到处找教程吗? 你还在为树莓派每次下载都要远隔重洋获取资源,龟速下载而烦恼吗? 为了解决这个问题,在这篇树莓派教程中,我将手把手叫你怎样安装 清华镜像系统和中文输入法 ...
- fastboot烧录镜像--VTS&GSI镜像替换
fastboot简介 Android提供的原生工具,主要用于替换镜像. 源码在SDK工程中,/system/core/fastboot目录下 安卓分区&镜像 见链接分区和映像--google官 ...
- 建立树莓派raspberry交叉编译环境以及编译内核
最近买了一个树莓派,玩了几天,虽然已经有很多人玩了,现在玩好像有点晚了,但是他确实是个好东西,学好它,对嵌入式的整个开发流程也就会熟悉很多.虽然性能不是很强和现在的BB-BLACK比有点慢了,但是它便 ...
- 树莓派CM4 wifi频繁断开连接
CM4核心板上自带的wifi模块连接上华为/小米的路由器5G热点以后,会频繁断开连接,断开连接前使用 iw dev 查看wifi信息如下: phy#0 Unnamed/non-netdev inter ...
- 【树莓派】使用树莓派制作img镜像(二)
树莓派制作的镜像,需要如何使用,这里直接引用目前树莓派官方的文章,不再重复描述: 参考:http://shumeipai.nxez.com/2013/08/31/usb-image-tool.html ...
- 【树莓派】制作树莓派所使用的img镜像(二)
树莓派制作的镜像,需要如何使用,这里直接引用目前树莓派官方的文章,不再重复描述: 参考:http://shumeipai.nxez.com/2013/08/31/usb-image-tool.html ...
随机推荐
- Ubuntu下的NVIDIA显卡【安装与卸载、CUDA安装】
@ 目录 0. 显卡GPU的基础知识 1. 显卡安装 Optional: 卸载显卡(当你要换显卡的时候) 2. 安装CUDA 碎碎念:主要是把显卡相关的整合出来,基础知识后面再放上来 显卡安装后可以有 ...
- AVCODEC_MAX_AUDIO_FRAME_SIZE 未定义标识符
调用ffmpeg接口时,出现了这个问题:未定义标识符"AVCODEC_MAX_AUDIO_FRAME_SIZE" 在网上搜了一下,可能的解决方案是: 添加: #define AVC ...
- 全国DNS服务器IP大全
- 我跟你说@RefreshScope跟Spring事件监听一起用有坑!
本文记录一下我在 Spring 自带的事件监听类添加 @RefreshScope 注解时遇到的坑,原本这两个东西单独使用是各自安好,但当大家将它们组合在一起时,会发现我们的事件监听代码被重复执行.希望 ...
- thinkphp5 关于跨域的一些坑
1.首先在tp5的入口文件:public/index.php 在里面添加三行: // [ 应用入口文件 ] header("Access-Control-Allow-Origin:*&quo ...
- oeasy教您玩转vim - 59 - # 编辑总结
[Github地址] (https://github.com/overmind1980/oeasyvim) [Gitee地址] (overmind1980/oeasyvim) [蓝桥实验楼 邀请码 ...
- oeasy教您玩转vim - 73 - # 映射map
映射map 回忆上次缩写的细节 这次了解到了:abbrivate缩写 可以定义缩写 :ab o1z oeasy 这里面还可以包括方向键.回车键之类的东西 可以定义到指定的模式 iab cab 查看 ...
- Django model 层之Models与Mysql数据库小结
Django model 层之Models与Mysql数据库小结 by:授客 QQ:1033553122 测试环境: Python版本:python-3.4.0.amd64 下载地址:https:// ...
- ORACLE PL/SQL 对象、表数据对比功能存储过程简单实现
最近帮忙跟进个oracle11g upgrade 升级到19c 的项目,由于业主方不太熟悉oracle upgrade相关升级流程,以及升级影响范围相关的事项,担心应用停机升级以后会导致数据库保存的业 ...
- 题解 CF653F Paper task
CF653F Paper task 给定一个长度为 \(n\) 和括号串,求本质不同的合法括号串个数.\(n\le 5\times 10^5\). 考虑如果不是求本质不同,可以想到 DP. 设 \(f ...