目标检测 | Spatially Sparse Convolution
Spatially Sparse Convolution
导言
为什么需要稀疏化?
在3D表示中,除了点云(Point Cloud)和网格模型(Mesh),我们常常还会使用到一种称为体素(Voxel)的表示方式。类似于像素(Pixel),这种表示方式将空间均匀地切割为一个个方块,TSDF和占据网格(Occupancy Network)都可以视为体素的一种变形。
最朴素的体素表示方式,这是一种稠密(Dense)的表示形式,我们给定一个\(L\times W\times H\)的包围盒,体素尺寸为\(1\times 1\times 1\),那么我们将得到一个\(L\times W\times H\)的\(bool\)矩阵:
\begin{cases}
1 & \text{if voxel } (x, y, z) \text{ is occupied.}, \\
0 & otherwise.
\end{cases}
\\
\text{where } 0 \leq x < L, \ 0 \leq y < W, \ 0 \leq z < H
\]
那么假设我们有一个\(70.4m\times80m\times4m\)的室外点云场景(KITTI点云格式的感知范围),给定每个体素大小为\(0.16m\times0.16m\times4m\)(PointPillar将点云体素化的参数),那么将得到一个大小为\(440\times 500\times1=220,000\)的体素网格,而最终有效的体素数量不会超过\(40,000\)个,即利用率不会超过\(18\%\),稠密表示形式下,有\(80\%\)的存储空间是被浪费的。
我们在模拟器中简单采集一帧点云做个实验就可以看到,当体素大小为\(0.05m\)时,基本保留原始点云的细节,但此时占用率不足千分之一。
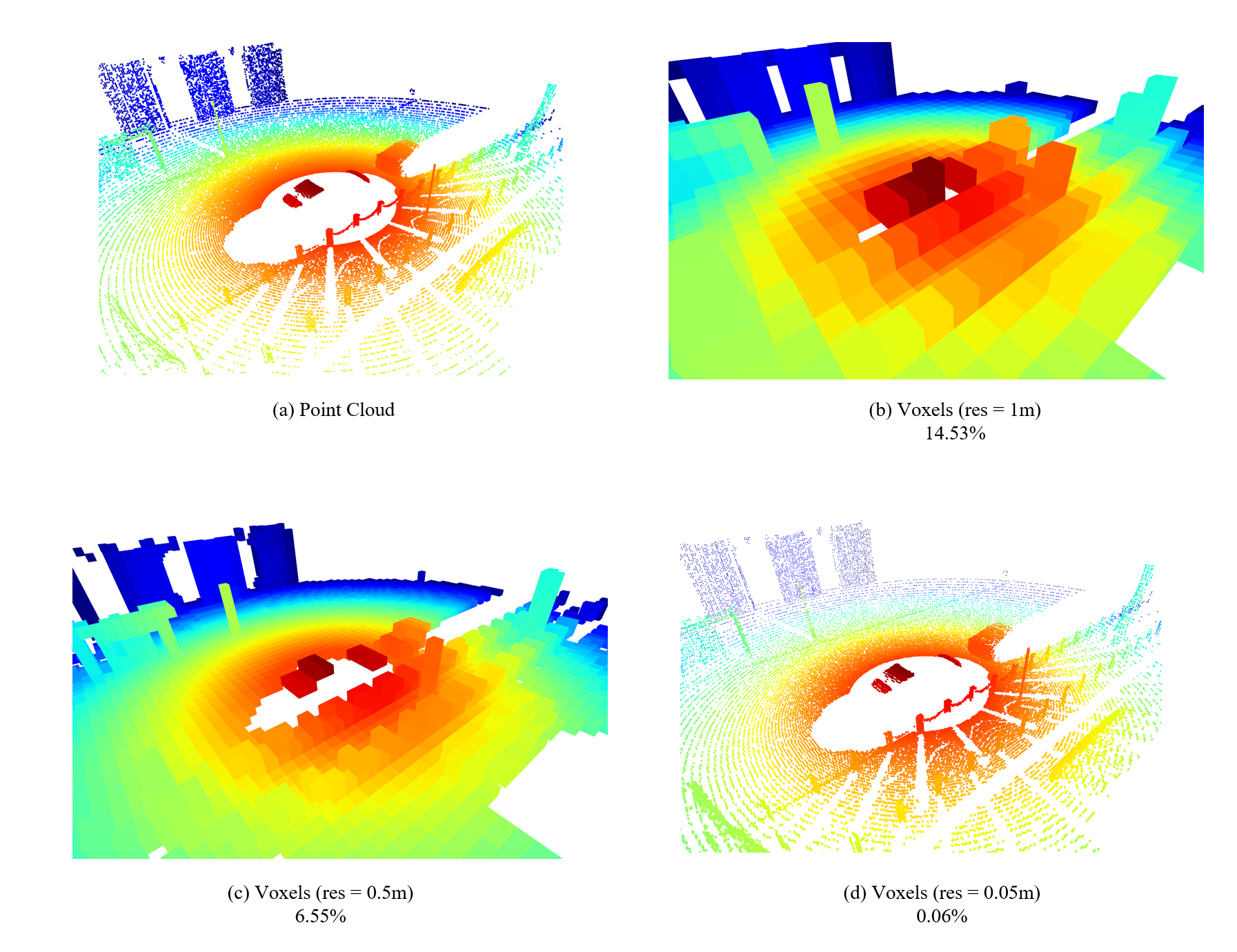
所以只表示有效体素的稀疏化表示就这样提出了,这种表示有效降低了内存的冗余,并加速了对体素的处理。
稀疏卷积
最常用的稀疏卷积分为Spatially Sparse Convolution(SparseConv)和Submanifold Sparse Convolution(SubMConv),前者是常规卷积操作的稀疏化版本,后者是保证不破坏特征图稀疏度的卷积操作。
现代通用版本的SparseConv实现出自于SECOND: Sparsely Embedded Convolutional Detection
SubMConv出自于3D Semantic Segmentation with Submanifold Sparse Convolutional Networks
稀疏卷积主要分为四个步骤:
- 张量稀疏化
- 建立indice pair
- 稀疏特征收集
- 稀疏卷积计算
稀疏卷积
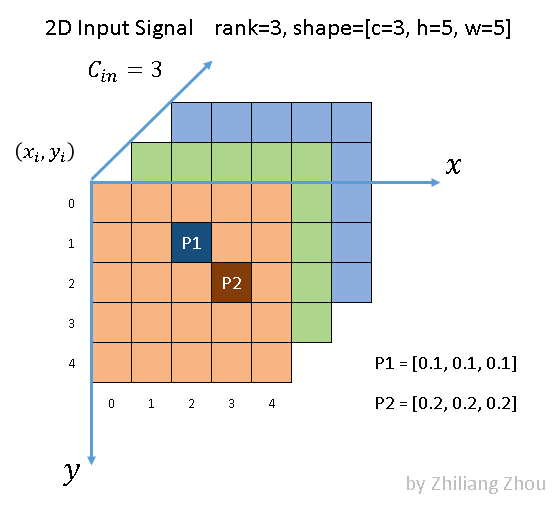
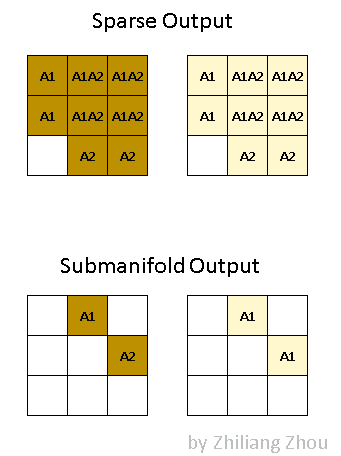
我们给出一个简单的稀疏卷积例子
如下图所示,P1与P2两个输入分别在SparseConv与SubMConv所关联的输出为A1与A2
张量稀疏化
张量稀疏化就是顾名思义将一个张量从稠密表示形式变换为稀疏表示形式,我们给出常用的COO内存的定义,给定一个张量\(\mathbf X\in \mathbf{R}^{N_1\times N_2\times\cdots \times N_m}\)与稀疏维度\(d\ge1\),得到一个索引\(\mathbf{I}\in\mathbf{R}^{n\times d}\)以及值\(\mathbf{V}\in\mathbf{R}^{n\times N_{d+1}\times\cdots \times N_m}\),其中\(n\ge 0\)为张量中的非\(0\)量的数量
- 给定\(\mathbf X\in\mathbf{R}^{2\times 2} = \begin{bmatrix} 0 & 2 \\ 3 & 0 \end{bmatrix}\),\(d=2\),得到\(\mathbf I\in{2\times 2} =\text{[[0, 1], [1, 0]]}\)以及\(\mathbf{V}\in\mathbf{R}^{2}=\text{[2., 3.]}\)
- 给定\(\mathbf X\in\mathbf{R}^{2\times 2\times 2} = \begin{bmatrix} \begin{bmatrix} 0 & 0 \\ 1 & 2 \end{bmatrix} \\ \begin{bmatrix} 0 & 0 \\ 3 & 4 \end{bmatrix} \end{bmatrix}\),\(d=2\),得到\(\mathbf I\in{2\times 2} =\text{[[0, 1], [1, 1]]}\)以及\(\mathbf{V}\in\mathbf{R}^{2\times2}=\text{[[1., 2.],[3., 4.]]}\)
五种内存管理形式
建立indice pair
在输入中,稀疏矩阵中非空量我们称为active input (actIn),那么每个actIn在输出中存在关联的量称为active output (actOut)
indice pair是一个\(k\times n\)的表结构,每个元素是一个索引对\((i, j)\),表示的是\(\text{actIn}[i]\)乘以卷积核中的第\(k\)个权重,其结果输出到\(\text{actOut}[j]\)中,建立indice pair如下进行:
初始化actOut
计算actIn所关联的每个actOut
给定一个\(\text{actIn}[i]=(x,y)\),可以算出每个输出坐标\((x^\prime,y^\prime)\)以及其对应卷积核位移\(k\)
在actOut寻找\((x^\prime,y^\prime)\)是否存在,没有就开辟一个新空间,返回其索引\(j\)
建立索引indicePair[k].append(i,j)
可以如下写成伪代码形式:
vector[K] get_indice_pair(act_in: vector, act_out: vector) {
initialize indice_pair = vector[K];
for i in enumerate(act_in.length()) {
pos_act_In = act_in[i];
for k, {x, y} in get_valid_out_pos(pos_act_In) {
j = act_out.find({x, y});
if(j == -1) {
j = act_out.length();
act_out.append({x, y});
}
indice_pair[k].append({i, j});
}
}
return indice_pair;
}
如果是SubMConv操作,在get_valid_out_pos中检查输出坐标在输入所对应的坐标中是否为actIn,否则过滤掉即可
注意:这里只是为了方便理解把indice pair写成了\(k\times n\)的表,实际indice pair一般都是一张\(2\times k\times n\)的表,其中\(\text{indice_pair}(0,k,n)=i,\ \text{indice_pair}(1,k,n)=j\),这样在特征收集与计算阶段就只需要读入半张表,提高性能
稀疏特征收集
这一步的目的在于通过indice_pair收集读入指定位置的特征feats,用于下一步的卷积计算。我们可以用公式表示:
\]
稀疏卷积计算
稀疏卷积计算分为两步:相乘与求和
相乘阶段
相乘阶段的目的在于将特征feats与指定位置的权重相乘
\[\text{feats}^\prime\in \mathbf{R}^{k\times n\times f} = \text{feats} \in\mathbf{R}^{k\times n\times f} \odot \text{kernal}\in \mathbf{R}^{k}
\]其中$\odot $是逐元素乘积
求和阶段
将上一阶段相乘的特征进行求和
\[\mathbf I = \text{actOut},\mathbf{V}(j)=\sum_{k}\text{feats}^\prime(k,n) \\\text{where}\ \text{indice_pair}[n]=\{i, j\}
\]可以如下写成伪代码形式:
vector[K] sparse_scatter_add_cpu(act_out: vector[N], indice_pair: vector[K], feats: Tensor[k, n, f], kernal[k]) {
feats = feats * kernal; \\Tensor[k, n, f]
value = tensor::zeros((act_out.length(), feats.size(2))); \\Initialize a full 0 Tensor with size [N, f]
for k in range(K) {
for index in range(indice_pair[k].length()) {
{i, j} = indice_pair[k, index];
value[j] += feats[k, index];
}
} return value;
}
并行版本的稀疏卷积
参考文献
目标检测 | Spatially Sparse Convolution的更多相关文章
- QueryDet: Cascaded Sparse Query for Accelerating High-Resolution Small Object Detection(QueryDet:用于加速高分辨率小目标检测的级联稀疏查询)
QueryDet: Cascaded Sparse Query for Accelerating High-Resolution Small Object Detection(QueryDet:用于加 ...
- CVPR2020论文解读:3D Object Detection三维目标检测
CVPR2020论文解读:3D Object Detection三维目标检测 PV-RCNN:Point-Voxel Feature Se tAbstraction for 3D Object Det ...
- 目标检测----ImageAI使用
1.开源项目 github地址 https://github.com/OlafenwaMoses/ImageAI 2.目标检测(Object Detection)入门概要 3.Pycharm中无法 ...
- (转)如何用TensorLayer做目标检测的数据增强
数据增强在机器学习中的作用不言而喻.和图片分类的数据增强不同,训练目标检测模型的数据增强在对图像做处理时,还需要对图片中每个目标的坐标做相应的处理.此外,位移.裁剪等操作还有可能使得一些目标在处理后只 ...
- 目标检测网络之 R-FCN
R-FCN 原理 R-FCN作者指出在图片分类网络中具有平移不变性(translation invariance),而目标在图片中的位置也并不影响分类结果;但是检测网络对目标的位置比较敏感.因此Fas ...
- 从YOLOv1到YOLOv3,目标检测的进化之路
https://blog.csdn.net/guleileo/article/details/80581858 本文来自 CSDN 网站,作者 EasonApp. 作者专栏: http://dwz.c ...
- 目标检测算法—YOLO-V1
为什么会叫YOLO呢? YOLO:you only look once.只需要看一眼,就可以检测识别出目标,主要是突出这个算法 快 的特点.(原文:Yolo系列之前的文章:主要是rcnn系列的,他们的 ...
- [转]CNN目标检测(一):Faster RCNN详解
https://blog.csdn.net/a8039974/article/details/77592389 Faster RCNN github : https://github.com/rbgi ...
- [DeeplearningAI笔记]卷积神经网络3.1-3.5目标定位/特征点检测/目标检测/滑动窗口的卷积神经网络实现/YOLO算法
4.3目标检测 觉得有用的话,欢迎一起讨论相互学习~Follow Me 3.1目标定位 对象定位localization和目标检测detection 判断图像中的对象是不是汽车--Image clas ...
- 语义分割(semantic segmentation) 常用神经网络介绍对比-FCN SegNet U-net DeconvNet,语义分割,简单来说就是给定一张图片,对图片中的每一个像素点进行分类;目标检测只有两类,目标和非目标,就是在一张图片中找到并用box标注出所有的目标.
from:https://blog.csdn.net/u012931582/article/details/70314859 2017年04月21日 14:54:10 阅读数:4369 前言 在这里, ...
随机推荐
- Windows的树形目录结构
一.文件.文件夹(目录).逻辑盘.路径的概念 · 文件:是操作系统用来存储和管理信息的基本单位.每个文件都有一个名称,叫文件名.文件名通常由基本文件名和扩展名两部分组成,其中基本文件名用于说明文件 ...
- 5.mysql中的触发器
创建存储过程和函数 触发器 ● create trigger语句用来创建一个触发器,触发器的作用是当表上有对应SQL语句发生时,则触发执行 ● 触发器创建时需要指定对应的表名tbl_name crea ...
- PDFSharp 1.5 更新
PDFsharp 1.50 Preview Information - PDFsharp & MigraDoc PDFShapr 1.50 修复与改进 支持 Object Streams - ...
- 中电金信:GienTech动态| 获奖、合作、与伙伴共谋数字化转型…
-- -- GienTech动态 -- -- 中电金信携"源启"亮相第十二届中国电子信息博览会 4月11日,为期三天的"第十二届中国电子信息博览会" ...
- 【NAS】绿联NAS+alist+lsky+natfrp 实现图床服务
alist 安装与配置 值得一提的就是,映射的data是配置相关的,让绿联直接默认路径就行,不需要手动设置 但是文件保存位置的映射的话,为了方便,可以单独映射到一个方便访问的文件夹,(但是要注意下权限 ...
- X64\X86\X86-64的区别
x86是指intel的开发的一种32位指令集,从386开始时代开始的,一直沿用至今,是一种cisc指令集,所有intel早期的cpu,amd早期的cpu都支持这种指令集,ntel官方文档里面称为&qu ...
- Fastadmin框架,服务器搭建环境
FastAdmin 基于ThinkPHP和Bootstrap的极速后台开发框架 https://www.fastadmin.net 安装node.js 1.获取node.js资源 V8.x: curl ...
- Appium_WebDriverAgent安装
一.WebDriverAgent安装到ios测试设备 a) 切换到appium 的appium-webdriveragent目录(/Applications/Appium.app/Contents ...
- Solution Set -「LOCAL」冲刺省选 Round XXVIII
\(\mathscr{Summary}\) A 题显然是图论模型嘛--但是卡得太久了,B 题 C 题都不好骗,裂开 qwq. 感觉时间安排上不尽合理,如果 B C 简单一点我这个就要挂打分了. ...
- 2024-12-28 AI智能体日报