gazebo小车模型(附带仿真环境)
参考链接
1、(https://blog.csdn.net/qq_43406338/article/details/109600827?ops_request_misc={"request_id"%3A"168087043216800182749128"%2C"scm"%3A"20140713.130102334.pc_all."}&request_id=168087043216800182749128&biz_id=0&utm_medium=distribute.pc_search_result.none-task-blog-2allfirst_rank_ecpm_v1~rank_v31_ecpm-1-109600827-null-null.142v82insert_down1,201v4add_ask,239v2insert_chatgpt&utm_term=Resource not found%3A gazebo_ros ROS path [0]%3D%2Fopt%2Fros%2Fmelodic%2Fshare%2Fros ROS path [1]%3D%2Fhome%2Fyehuo%2Fmycar_ws%2Fsrc ROS path [2]%3D%2Fopt%2Fros%2Fmelodic%2Fshare The traceback for the exception was written to the log &spm=1018.2226.3001.4187)
2、(https://blog.csdn.net/samsu0108/article/details/121686776?ops_request_misc=&request_id=&biz_id=102&utm_term=[Err] [REST.cc:205] Error in R&utm_medium=distribute.pc_search_result.none-task-blog-2allsobaiduweb~default-0-121686776.142v82insert_down1,201v4add_ask,239v2insert_chatgpt&spm=1018.2226.3001.4187)
3、(https://blog.csdn.net/qq_39400324/article/details/125051463?ops_request_misc=&request_id=&biz_id=102&utm_term=Error [Converter.cc:151] Unabl&utm_medium=distribute.pc_search_result.none-task-blog-2allsobaiduweb~default-0-125051463.142v82insert_down1,201v4add_ask,239v2insert_chatgpt&spm=1018.2226.3001.4187)
4、(http://www.autolabor.com.cn/book/ROSTutorials/di-6-zhang-ji-qi-ren-xi-tong-fang-zhen/66-urdfji-cheng-gazebo.html)
5、(https://www.bilibili.com/video/BV1Ci4y1L7ZZ?p=271&vd_source=4acdb875c05ce9dccfce3cd6cfaac651)
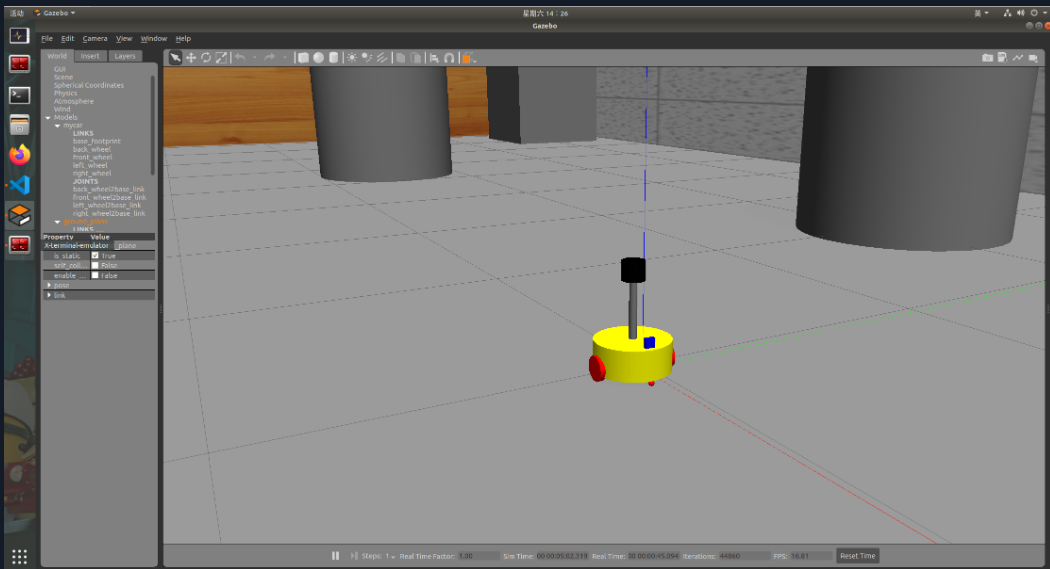
成果图
STEP1:创建工作空间
mkdir -p mycar_ws/src
cd mycar_ws
catkin_make
STEP2:在vscode中准备需要的文件夹
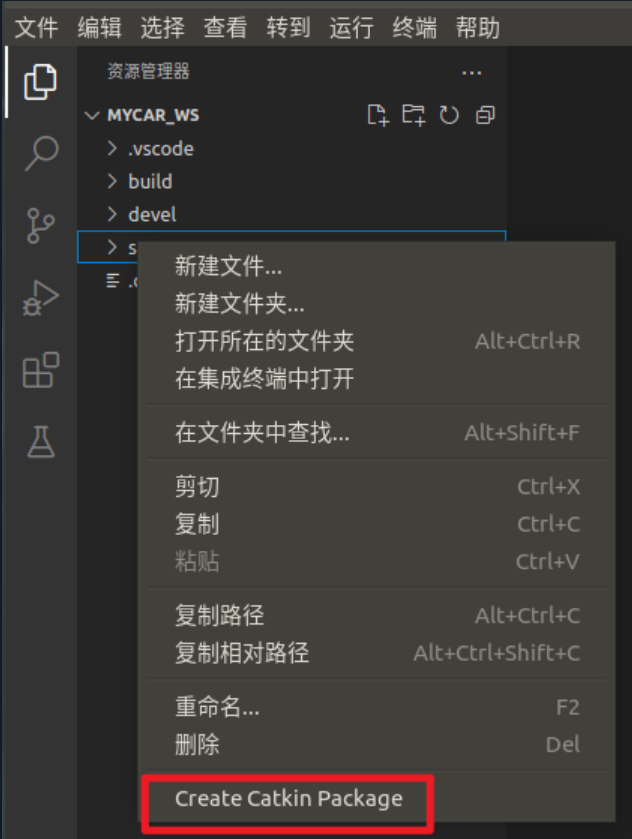
右键src,点击Create Catkin Package
先输入包名:mycar
再输入依赖工具:urdf xacro gazebo_ros gazebo_ros_control gazebo_plugins
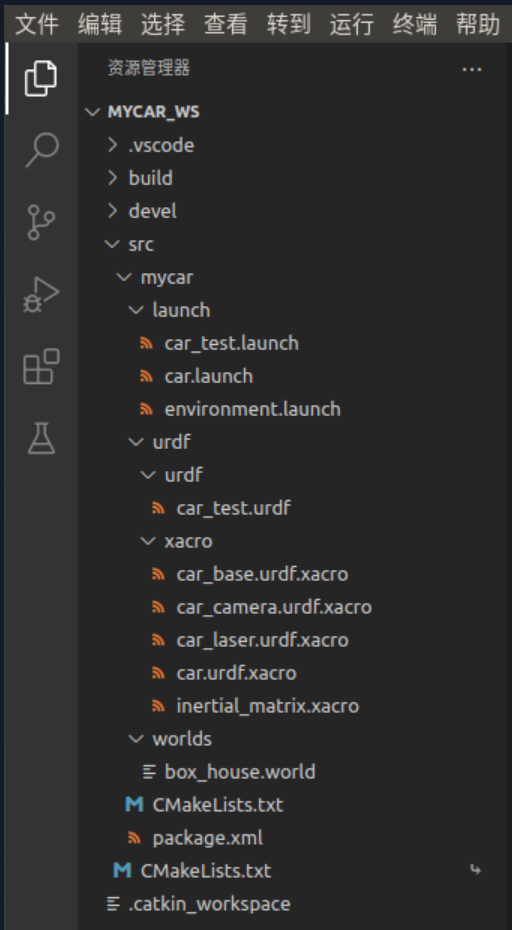
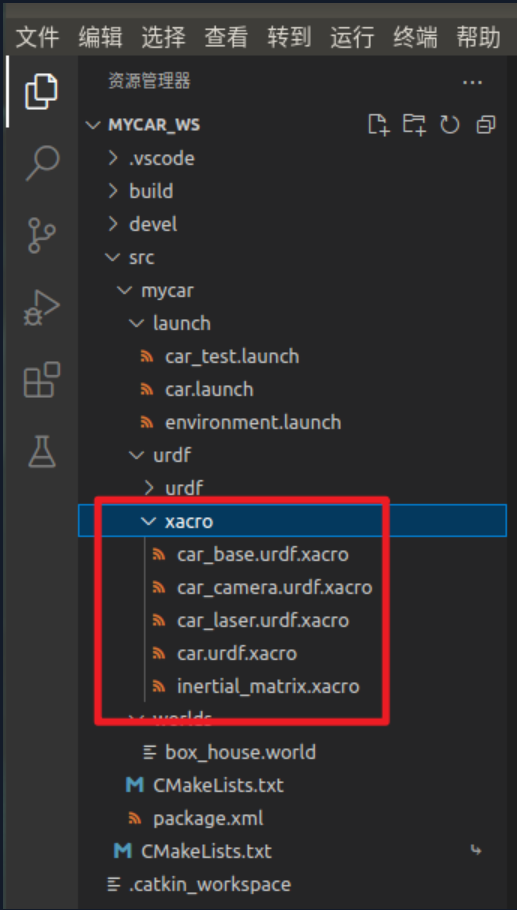
STEP3:在vscode中准备需要的文件夹
在mycar目录下依次创建 launch、urdf、worlds文件夹
在 mycar/urdf 文件夹下再创建 xacro文件夹
结构如下图所示

STEP4:mycar/launch
创建 environment.launch 文件
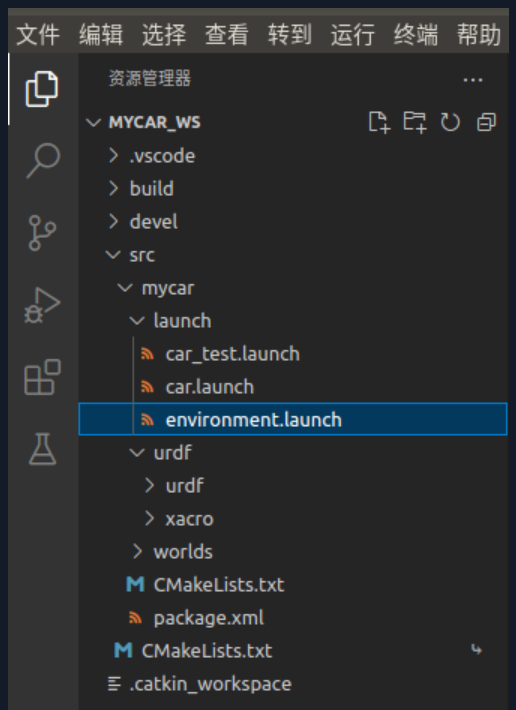
mycar/launch/environment.launch
<launch>
<param name="robot_description" command="$(find xacro)/xacro $(find mycar)/urdf/xacro/car.urdf.xacro" />
<include file="$(find gazebo_ros)/launch/empty_world.launch">
<arg name="world_name" value="$(find mycar)/worlds/box_house.world" />
</include>
<node pkg="gazebo_ros" type="spawn_model" name="model" args="-urdf -model mycar -param robot_description" />
</launch>
STEP5:下载worlds文件夹下需要的文件
终端输入命令
git clone https://github.com/zx595306686/sim_demo.git
得到以下文件
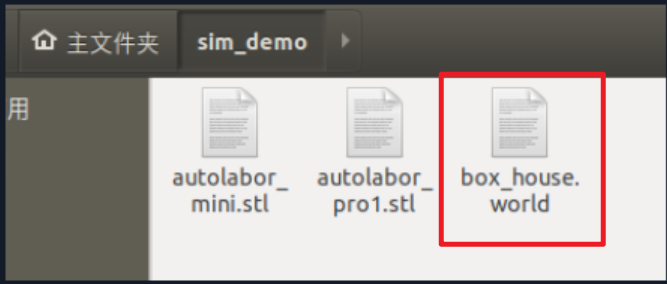
将第三个文件 box_house.world 复制到mycar_ws中创建的worlds文件夹下

STEP6:mycar/urdf/xacro
创建以下文件
mycar/urdf/xacro/car_base.urdf.xacro
<robot name="mycar" xmlns:xacro="http://www.ros.org/wiki/xacro">
<xacro:property name="PI" value="3.141"/>
<material name="black">
<color rgba="0.0 0.0 0.0 1.0" />
</material>
<xacro:property name="footprint_radius" value="0.001" />
<xacro:property name="base_radius" value="0.1" />
<xacro:property name="base_length" value="0.08" />
<xacro:property name="earth_space" value="0.015" />
<xacro:property name="base_joint_z" value="${base_length / 2 + earth_space}" />
<xacro:property name="base_mass" value="2" />
<!-- base -->
<link name="base_footprint">
<visual>
<geometry>
<sphere radius="${footprint_radius}" />
</geometry>
</visual>
</link>
<link name="base_link">
<visual>
<geometry>
<cylinder radius="${base_radius}" length="${base_length}" />
</geometry>
<origin xyz="0 0 0" rpy="0 0 0" />
<material name="baselink_color">
<color rgba="1.0 0.5 0.2 0.7" />
</material>
</visual>
<collision>
<geometry>
<cylinder radius="${base_radius}" length="${base_length}" />
</geometry>
<origin xyz="0 0 0" rpy="0 0 0" />
</collision>
<xacro:cylinder_inertial_matrix m="${base_mass}" r="${base_radius}" h="${base_length}" />
</link>
<gazebo reference="base_link">
<material>Gazebo/Yellow</material>
</gazebo>
<joint name="link2footprint" type="fixed">
<parent link="base_footprint" />
<child link="base_link" />
<origin xyz="0 0 ${earth_space + base_length / 2 }" rpy="0 0 0"/>
</joint>
<!-- qudong wheel -->
<xacro:property name="wheel_radius" value="0.0325" />
<xacro:property name="wheel_length" value="0.015" />
<xacro:property name="wheel_mass" value="0.05" />
<xacro:macro name="add_wheels" params="name flag">
<link name="${name}_wheel">
<visual>
<geometry>
<cylinder radius="${wheel_radius}" length="${wheel_length}" />
</geometry>
<origin xyz="0.0 0.0 0.0" rpy="${PI / 2} 0.0 0.0" />
<material name="black" />
</visual>
<collision>
<geometry>
<cylinder radius="${wheel_radius}" length="${wheel_length}" />
</geometry>
<origin xyz="0.0 0.0 0.0" rpy="${PI / 2} 0.0 0.0" />
</collision>
<xacro:cylinder_inertial_matrix m="${wheel_mass}" r="${wheel_radius}" h="${wheel_length}" />
</link>
<gazebo reference="${name}_wheel">
<material>Gazebo/Red</material>
</gazebo>
<joint name="${name}_wheel2base_link" type="continuous">
<parent link="base_link" />
<child link="${name}_wheel" />
<origin xyz="0 ${flag * base_radius} ${-(earth_space + base_length / 2 - wheel_radius) }" />
<axis xyz="0 1 0" />
</joint>
</xacro:macro>
<xacro:add_wheels name="left" flag="1" />
<xacro:add_wheels name="right" flag="-1" />
<!-- zhicheng/wanxiang wheel -->
<xacro:property name="support_wheel_radius" value="0.0075" />
<xacro:property name="support_wheel_mass" value="0.01" />
<xacro:macro name="add_support_wheel" params="name flag" >
<link name="${name}_wheel">
<visual>
<geometry>
<sphere radius="${support_wheel_radius}" />
</geometry>
<origin xyz="0 0 0" rpy="0 0 0" />
<material name="black" />
</visual>
<collision>
<geometry>
<sphere radius="${support_wheel_radius}" />
</geometry>
<origin xyz="0 0 0" rpy="0 0 0" />
</collision>
<xacro:sphere_inertial_matrix m="${support_wheel_mass}" r="${support_wheel_radius}" />
</link>
<gazebo reference="${name}_wheel">
<material>Gazebo/Red</material>
</gazebo>
<joint name="${name}_wheel2base_link" type="continuous">
<parent link="base_link" />
<child link="${name}_wheel" />
<origin xyz="${flag * (base_radius - support_wheel_radius)} 0 ${-(base_length / 2 + earth_space / 2)}" />
<axis xyz="1 1 1" />
</joint>
</xacro:macro>
<xacro:add_support_wheel name="front" flag="1" />
<xacro:add_support_wheel name="back" flag="-1" />
</robot>
mycar/urdf/xacro/car_camera.urdf.xacro
<robot name="my_camera" xmlns:xacro="http://wiki.ros.org/xacro">
<xacro:property name="camera_length" value="0.01" />
<xacro:property name="camera_width" value="0.025" />
<xacro:property name="camera_height" value="0.025" />
<xacro:property name="camera_x" value="0.08" />
<xacro:property name="camera_y" value="0.0" />
<xacro:property name="camera_z" value="${base_length / 2 + camera_height / 2}" />
<xacro:property name="camera_mass" value="0.01" />
<link name="camera">
<visual>
<geometry>
<box size="${camera_length} ${camera_width} ${camera_height}" />
</geometry>
<origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0" />
<material name="black" />
</visual>
<collision>
<geometry>
<box size="${camera_length} ${camera_width} ${camera_height}" />
</geometry>
<origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0" />
</collision>
<xacro:Box_inertial_matrix m="${camera_mass}" l="${camera_length}" w="${camera_width}" h="${camera_height}" />
</link>
<gazebo reference="camera">
<material>Gazebo/Blue</material>
</gazebo>
<joint name="camera2base_link" type="fixed">
<parent link="base_link" />
<child link="camera" />
<origin xyz="${camera_x} ${camera_y} ${camera_z}" />
</joint>
</robot>
mycar/urdf/xacro/car_laser.urdf.xacro
<robot name="my_laser" xmlns:xacro="http://wiki.ros.org/xacro">
<xacro:property name="support_length" value="0.15" />
<xacro:property name="support_radius" value="0.01" />
<xacro:property name="support_x" value="0.0" />
<xacro:property name="support_y" value="0.0" />
<xacro:property name="support_z" value="${base_length / 2 + support_length / 2}" />
<xacro:property name="support_mass" value="0.02" />
<link name="support">
<visual>
<geometry>
<cylinder radius="${support_radius}" length="${support_length}" />
</geometry>
<origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0" />
<material name="red">
<color rgba="0.8 0.2 0.0 0.8" />
</material>
</visual>
<collision>
<geometry>
<cylinder radius="${support_radius}" length="${support_length}" />
</geometry>
<origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0" />
</collision>
<xacro:cylinder_inertial_matrix m="${support_mass}" r="${support_radius}" h="${support_length}" />
</link>
<gazebo reference="support">
<material>Gazebo/Grey</material>
</gazebo>
<joint name="support2base_link" type="fixed">
<parent link="base_link" />
<child link="support" />
<origin xyz="${support_x} ${support_y} ${support_z}" />
</joint>
<xacro:property name="laser_length" value="0.05" />
<xacro:property name="laser_radius" value="0.03" />
<xacro:property name="laser_x" value="0.0" />
<xacro:property name="laser_y" value="0.0" />
<xacro:property name="laser_z" value="${support_length / 2 + laser_length / 2}" />
<xacro:property name="laser_mass" value="0.1" />
<link name="laser">
<visual>
<geometry>
<cylinder radius="${laser_radius}" length="${laser_length}" />
</geometry>
<origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0" />
<material name="black" />
</visual>
<collision>
<geometry>
<cylinder radius="${laser_radius}" length="${laser_length}" />
</geometry>
<origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0" />
</collision>
<xacro:cylinder_inertial_matrix m="${laser_mass}" r="${laser_radius}" h="${laser_length}" />
</link>
<gazebo reference="laser">
<material>Gazebo/Black</material>
</gazebo>
<joint name="laser2support" type="fixed">
<parent link="support" />
<child link="laser" />
<origin xyz="${laser_x} ${laser_y} ${laser_z}" />
</joint>
</robot>
mycar/urdf/xacro/car.urdf.xacro
<robot name="car" xmlns:xacro="http://wiki.ros.org/xacro">
<xacro:include filename="inertial_matrix.xacro" />
<xacro:include filename="car_base.urdf.xacro" />
<xacro:include filename="car_camera.urdf.xacro" />
<xacro:include filename="car_laser.urdf.xacro" />
</robot>
mycar/urdf/xacro/inertial_matrix.xacro
<robot name="base" xmlns:xacro="http://wiki.ros.org/xacro">
<!-- Macro for inertia matrix -->
<xacro:macro name="sphere_inertial_matrix" params="m r">
<inertial>
<mass value="${m}" />
<inertia ixx="${2*m*r*r/5}" ixy="0" ixz="0"
iyy="${2*m*r*r/5}" iyz="0"
izz="${2*m*r*r/5}" />
</inertial>
</xacro:macro>
<xacro:macro name="cylinder_inertial_matrix" params="m r h">
<inertial>
<mass value="${m}" />
<inertia ixx="${m*(3*r*r+h*h)/12}" ixy = "0" ixz = "0"
iyy="${m*(3*r*r+h*h)/12}" iyz = "0"
izz="${m*r*r/2}" />
</inertial>
</xacro:macro>
<xacro:macro name="Box_inertial_matrix" params="m l w h">
<inertial>
<mass value="${m}" />
<inertia ixx="${m*(h*h + l*l)/12}" ixy = "0" ixz = "0"
iyy="${m*(w*w + l*l)/12}" iyz= "0"
izz="${m*(w*w + h*h)/12}" />
</inertial>
</xacro:macro>
</robot>
STEP7:运行
启动 roscore
建议在vscode外终端启动(也可在vscode中启动)

设置环境变量,启动gazebo
在vscode中新建终端
注意要进入 mycar_ws 路径下
依次执行以下命令

出现如下画面即代表创建成功
第一次创建时可检查一下左栏选项是否一致

常见问题汇总
1、ResourceNotFound: gazebo_ros
ResourceNotFound: gazebo_ros
ROS path [0]=/opt/ros/kinetic/share/ros
ROS path [1]=/home/park/catkin_ws/src
ROS path [2]=/opt/ros/kinetic/share
问题:找不到资源
解决办法:直接安装缺失的gazebo:
$ sudo apt-get install ros-kinetic-gazebo-ros-pkgs ros-kinetic-gazebo-ros-control
2、[Err] [REST.cc:205] Error in REST request Gazebo 启动报错

1、在终端输入命令
sudo vim ~/.ignition/fuel/config.yaml
2、将https://api.ignitionfuel.org替换为https://fuel.ignitionrobotics.org
3、Unable to convert from SDF version 1.7 to 1.6

将 environment.world文件 中第一行的<sdf version = '1.7'>该为<sdf version = '1.6'>即可。

gazebo小车模型(附带仿真环境)的更多相关文章
- 【探索之路】机器人篇(5)-Gazebo物理仿真环境搭建_让机器人运动起来
如果完成了前两步,那么其实我们已经可以去连接我们的现实中的机器人了. 但是,做机器人所需要的材料还没有到,所以我们这里先在电脑平台上仿真一下.这里我们用到的就算gazebo物理仿真环境,他能很好的和R ...
- ROS学习笔记十二:使用gazebo在ROS中仿真
想要在ROS系统中对我们的机器人进行仿真,需要使用gazebo. gazebo是一种适用于复杂室内多机器人和室外环境的仿真环境.它能够在三维环境中对多个机器人.传感器及物体进行仿真,产生实际传感器反馈 ...
- 基于 Mathematica 的机器人仿真环境(机械臂篇)[转]
完美的教程,没有之一,收藏学习. 目的 本文手把手教你在 Mathematica 软件中搭建机器人的仿真环境,具体包括以下内容(所使用的版本是 Mathematica 11.1,更早的版本可能缺少某些 ...
- 【黑金原创教程】【Modelsim】【第四章】激励文本就是仿真环境
声明:本文为黑金动力社区(http://www.heijin.org)原创教程,如需转载请注明出处,谢谢! 黑金动力社区2013年原创教程连载计划: http://www.cnblogs.com/ ...
- 项目开发过程中什么是开发环境、测试环境、生产环境、UAT环境、仿真环境?
项目开发过程中什么是开发环境.测试环境.生产环境.UAT环境.仿真环境? 最近在公司项目开发过程中总用到测试环境,生产环境和UAT环境等,然而我对环境什么的并不是很理解它的意思,一直处于开发阶段,出于 ...
- 搭建Modelsim SE仿真环境-使用do文件仿真
本章我们介绍仿真环境搭建是基于Modelsim SE的.Modelsim有很多版本,比如说Modelsim-Altera,但是笔者还是建议大家使用Modelsim-SE,Modelsim-Altera ...
- 什么是 开发环境、测试环境、生产环境、UAT环境、仿真环境
开发环境:开发环境是程序猿们专门用于开发的服务器,配置可以比较随意, 为了开发调试方便,一般打开全部错误报告. 测试环境:一般是克隆一份生产环境的配置,一个程序在测试环境工作不正常,那么肯定不能把它发 ...
- [pixhawk笔记]8-半物理仿真环境
通过半物理仿真,可以在不试飞的情况下对飞控的软硬件进行部分验证,下面结合文档对半物理仿真环境的搭建和运行进行学习.先跑起来再说. Pixhawk支持多轴和固定翼的仿真,多轴用jMavSim,固定翼用X ...
- 开发环境、测试环境、生产环境、UAT环境、仿真环境详解
版权声明:本文为博主原创文章,遵循CC 4.0 by-sa版权协议,转载请附上原文出处链接和本声明. 本文链接:https://blog.csdn.net/WYX15011474269/article ...
- 01-SV入门及仿真环境搭建
1.SV入门 参考书籍<SystemVerilog验证 测试平台编写指南> [美]克里斯·斯皮尔 著 2.仿真环境搭建 仿真工具:modelsim se 2019.2,它不仅支持Veril ...
随机推荐
- 在Win7 x64环境中将World Wind Java SDK 2.1.0嵌入到Eclipse中的方法
1.解压worldwind-2.1.0.zip. 2.打开Eclipse,依次点击New–>Java project ,输入project的名称WorldWind,一路直到finish.然后就可 ...
- 一套亿级用户的IM架构技术干货(上篇):整体架构、服务拆分等
1.引言 经历过稍有些规模的IM系统开发的同行们都有体会,要想实现大规模并发IM(比如亿级用户和数十亿日消息量这样的规模),在架构设计上需要一些额外的考虑,尤其是要解决用户高并发.服务高可用,架构和实 ...
- 前端学习openLayers配合vue3(获取矢量图的个数,省份的个数)
矢量图层绘制了一个中国地图,我们获取一下矢量图层的个数 关键代码 map .getLayers()//获取所有图层 .item(1)//获取矢量图层 .getSource() .on("ch ...
- UWP ManipulationStarted 移动图片或控件不要滑出父容器的判断
假设自定义一个用户控件用以在父容器Grid里拖动/移动: <UserControl x:Class="App6.Pic" xmlns="http://schemas ...
- Sharding-JDBC分库分表
https://blog.csdn.net/bochuangli/article/details/123029392 https://blog.csdn.net/bochuangli/article/ ...
- Golang-函数5
http://c.biancheng.net/golang/func/ Go语言函数(Go语言func) 函数构成了代码执行的逻辑结构,在Go语言中,函数的基本组成为:关键字 func.函数名.参数列 ...
- ESP32 idf常用脚本命令及git命令
一.Linux环境 1.下载并安装相关的工具 ./install.sh 2.添加ESP-IDF工具到PATH中 . ./export.sh 3.打开配置界面 idf.py menuconfig 4.设 ...
- 从倒水问题到盛最多水的容器:一道经典的双指针应用题|LeetCode 11 盛最多水的容器
LeetCode 11 盛最多水的容器 点此看全部题解 LeetCode必刷100题:一份来自面试官的算法地图(题解持续更新中) 生活中的算法 你有没有遇到过这样的场景:家里要举办派对,需要准备一个大 ...
- .NET周刊【1月第2期 2025-01-12】
国内文章 [.NET] API网关选择:YARP还是Ocelot? https://www.cnblogs.com/madtom/p/18655530 本文详细比较了YARP和Ocelot两种API网 ...
- 卸载CentOS7自带的jdk
卸载CentOS7自带的jdk 问题描述 在安装完centOS 7虚拟机后,执行 java -version,发现系统自带jdk8.因为我想使用jdk11,安装并配置环境变量后,环境变量仍显示为jdk ...