STM32-24位AD7799驱动之手册代码详解,支持模拟SPI和硬件SPI
1.AD7799介绍
AD7799结构图如下所示:
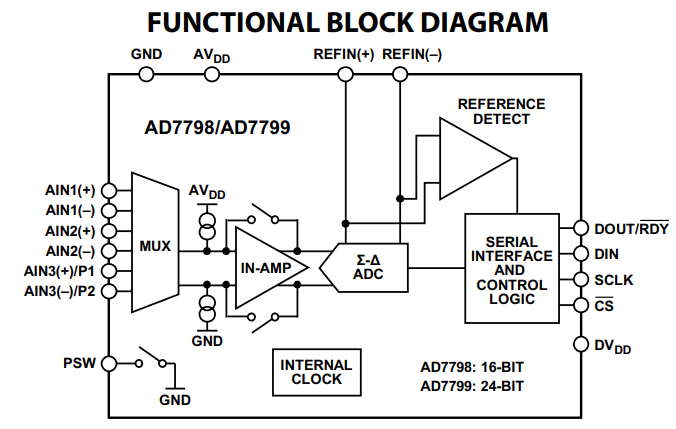
其中REFIN参考电压建议为2.5V, REFIN电压低于0.1V时,则差分输入ad值就无法检测了,如下图所示:

注意:
如果REG_CONFIG的REF_DET开启的话,那么输入AD值电压低于0.5V时,则差分输入ad值就无法检测了,如下图所示:

2.AD7799差分信号的输入模式
如下图所示,差分输入电压有3种模式:

注意:
单端输入电压(AIN-接地,只有正电压)则支持任意范围,比如In-Amp模式下,单端输入如果为10mv的话,也能检测到.
2.1 Unbuffered Mode非缓冲模式
该模式可测的AD值可以在 -30mV ~ (AVDD+30mv)范围之间,如果开了双极型模式(双极型模式通过将REG_CONFIG的U/B位设0实现),则也可以测-(AVDD+30mv)~30mV之间AD值.
也就是说假如我们要测的AD值位于-100mV~100mV之间,则用这个模式.
该模式优缺点:可测范围最大,但是精度误差不是很高
2.2 Buffered Mode缓冲模式
缓冲的作用就是减少测的AD误差,并且功耗相应地会增高点,该模式主要是测100mV~( AVDD-100mV)之间.
该模式优缺点:可测范围比Unbuffered小一点,并且精度误差高一点
2.3 In-Amp 高增益模式
需要将REG_CONFIG的Gain调到4及以上才是该模式,否则的话,就会根据REG_CONFIG的BUF位来自动判断是Buffered Mode还是Unbuffered Mode.
并且AD值必须位于300mv~(AVDD+1100mv)之间,否则的话该模式是无法检测AD值的,之前笔者就是测差分输入的正负20mV,却一直没有反应,后来才发现是处于这个模式的原因.
该模式优缺点:可测范围可以通过设置Gain来设置测试范围,比如VREF为3V,Gain=4,则可测量程为正负600mv.
注意:
当使用Buffered Mode或者In-Amp模式时,需要将REG_CONFIG的BO位开启,介绍如下图所示:

3.代码效果
串口截图如下:
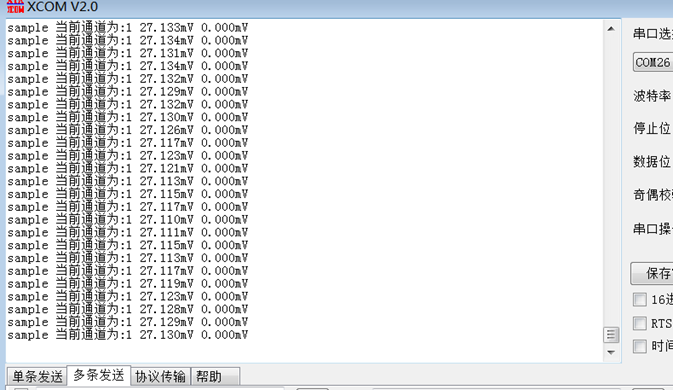
通过电压发生器不停修改AD值时,可以看到万用表和串口打印的数据相差不大:

PS:由于GIF录制的像素位数太低,所以不清晰
4.代码实现
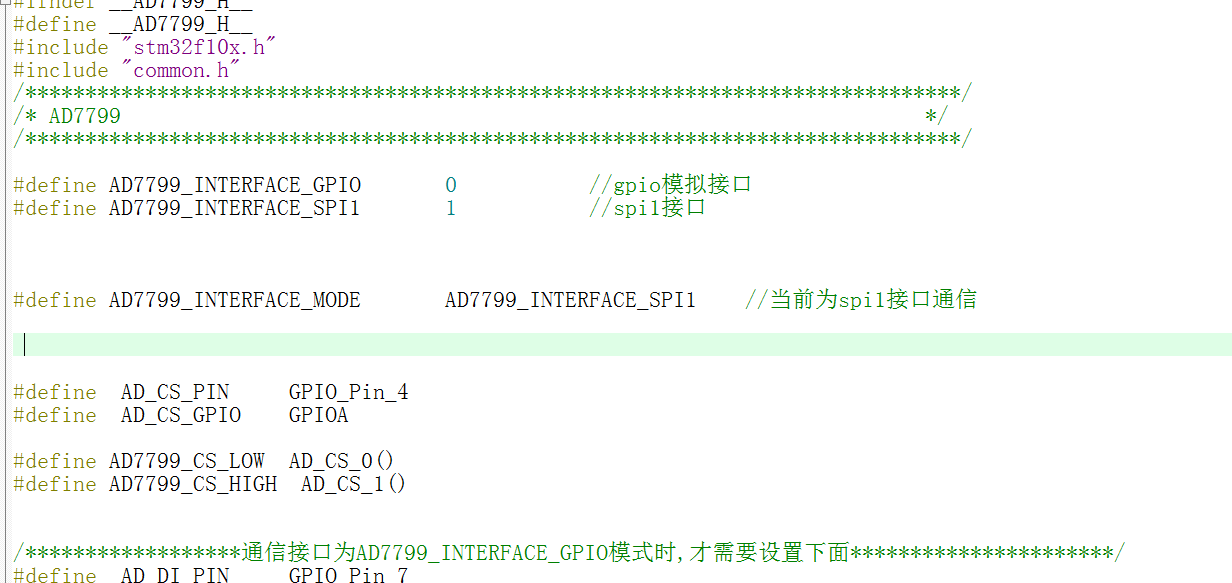
支持硬件SPI1或者GPIO模拟方式
代码通过宏AD7799_INTERFACE_MODE判断,能够支持硬件SPI1或者GPIO模拟方式,如下图所示:
通过宏定义VREF参考电压,以及GAIN增益值
如下图所示,只需修改下面宏,就可以实现转换电压数据自动转换:

实现通道1和通道2来回切换
串口发送select 1,表示选择通道1:
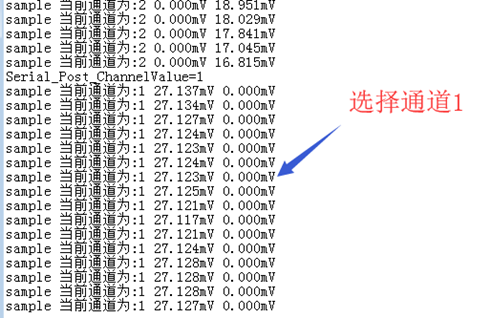
发送select 2,则表示选择通道2.
4.1初始化过程
/*ad7799初始化*/
AD7799_gpio_init();
while(!AD7799_Init())
{
LED0 = !LED0;
delay_ms(50);
}
LED0 = 1;
AD7799_Calibrate(); //通道校准
AD7799_SetGain(AD7799_CHIP_GAIN);
AD7799_SetBurnoutCurren(0); //关闭BO
AD7799_SetBufMode(0); //由于我们要测的电压低于100mV,所以设置为Unbuffered Mode
AD7799_SetChannel(ChannelBuf[0]); //通道设置.
AD7799_SetMode(AD7799_MODE_CONT,5); //默认双极性 频率为5
AD7799_SetReference(0); //关闭参考检测,因为我们的 AD7799_RefmV 参考电压低于0.5V
4.2 上面的函数如下所示:
void AD7799_gpio_init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Pin = AD_CS_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(AD_CS_GPIO, &GPIO_InitStructure); //CS片选 #if ( AD7799_INTERFACE_MODE == AD7799_INTERFACE_SPI1 )
//spi1 mode
SPI1_Init();
SPI1_SetSpeed(SPI_BaudRatePrescaler_2);
#else
//gpio模拟spi mode
GPIO_InitStructure.GPIO_Pin = AD_DI_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(AD_DI_GPIO, &GPIO_InitStructure); GPIO_InitStructure.GPIO_Pin = AD_SCK_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(AD_SCK_GPIO, &GPIO_InitStructure); GPIO_InitStructure.GPIO_Pin = AD_DO_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;
GPIO_Init(AD_DO_GPIO, &GPIO_InitStructure);
spi_AD7799_init();
#endif
AD7799_Reset();
}
void AD7799_SetGain(unsigned long gain)
{
unsigned long command;
command = AD7799_GetRegisterValue(AD7799_REG_CONF,);
command &= ~AD7799_CONF_GAIN(0xFF);
command |= AD7799_CONF_GAIN(gain);
AD7799_SetRegisterValue(
AD7799_REG_CONF,
command, );
} void AD7799_SetBurnoutCurren(u8 enable)//设置BO
{
unsigned long command;
command = AD7799_GetRegisterValue(AD7799_REG_CONF,);
command &= ~0X2000;
if(enable)
command |= 0X2000;
AD7799_SetRegisterValue(
AD7799_REG_CONF,
command, ); } void AD7799_SetBufMode(u8 enable) //设置buf
{
unsigned long command;
command = AD7799_GetRegisterValue(AD7799_REG_CONF,);
command &= ~0X10;
if(enable)
command |= 0X10;
AD7799_SetRegisterValue(
AD7799_REG_CONF,
command, );
} void AD7799_SetChannel(unsigned long channel)
{
unsigned long command;
command = AD7799_GetRegisterValue(AD7799_REG_CONF,);
command &= ~AD7799_CONF_CHAN(0xFF);
command |= AD7799_CONF_CHAN(channel);
AD7799_SetRegisterValue(
AD7799_REG_CONF,
command, );
} void AD7799_SetMode(unsigned long mode,u8 rate)
{
unsigned long command;
command = AD7799_GetRegisterValue(AD7799_REG_MODE,);
command &= ~AD7799_MODE_SEL(0xFF);
command |= AD7799_MODE_SEL(mode);
command &= 0XFFF0;
command |= rate; //设置频率 AD7799_SetRegisterValue(
AD7799_REG_MODE,
command, );
}
void AD7799_SetReference(unsigned char state)
{
unsigned long command = ;
command = AD7799_GetRegisterValue(AD7799_REG_CONF,);
command &= ~AD7799_CONF_REFDET();
command |= AD7799_CONF_REFDET(state);
AD7799_SetRegisterValue(AD7799_REG_CONF, command, ); } void AD7799_SetRegisterValue(unsigned char regAddress,
unsigned long regValue,
unsigned char size)
{
unsigned char data[] = {0x03, 0x00, 0x00, 0x00, 0x00};
data[] = AD7799_COMM_WRITE | AD7799_COMM_ADDR(regAddress);
if(size == )
{
data[] = (unsigned char)regValue;
}
if(size == )
{
data[] = (unsigned char)((regValue & 0x0000FF) >> );
data[] = (unsigned char)((regValue & 0x00FF00) >> );
}
if(size == )
{
data[] = (unsigned char)((regValue & 0x0000FF) >> );
data[] = (unsigned char)((regValue & 0x00FF00) >> );
data[] = (unsigned char)((regValue & 0xFF0000) >> );
}
AD7799_CS_LOW;
SPI_Write(data,( + size));
AD7799_CS_HIGH;
} unsigned long AD7799_GetRegisterValue(unsigned char regAddress, unsigned char size)
{
unsigned char data[] = {0x00, 0x00, 0x00, 0x00, 0x00};
unsigned long receivedData = 0x00;
data[] = AD7799_COMM_READ | AD7799_COMM_ADDR(regAddress);
AD7799_CS_LOW;
SPI_Write(data,);
SPI_Read(data,size);
AD7799_CS_HIGH;
if(size == )
{
receivedData += (data[] << );
}
if(size == )
{
receivedData += (data[] << );
receivedData += (data[] << );
}
if(size == )
{
receivedData += (data[] << );
receivedData += (data[] << );
receivedData += (data[] << );
}
return receivedData;
}
4.3 获取通道电压代码如下所示:
while()
{
if(Serial_Post_ChannelValue!=0XFF) //0:不选择 1~2:更改通道
{
CurrentChannelValue = Serial_Post_ChannelValue;
Serial_Post_ChannelValue =0XFF; if(CurrentChannelValue && CurrentChannelValue<=) //1~2
{
AD7799_SetChannel(ChannelBuf[CurrentChannelValue-]);//通道设置. 0~1
delay_ms();
AD7799_GetRegisterValue(AD7799_REG_DATA,);//清空之前的AD
}
else if(CurrentChannelValue == )
{
printf("%s value0 0 0 \r\n",Board_Name);
}
} if(CurrentChannelValue) //选择了通道?
{
for(i=;i<;i++) //获取每个通道数据
if(CurrentChannelValue == (i+))
{
while( !AD7799_Ready()) //1~2
{
delay_ms();
}
ADValues[i]= analyzeAD7799_Data(AD7799_GetRegisterValue(AD7799_REG_DATA,));
}
else
ADValues[i] = 0.0000; printf("%s 当前通道为:%d %.3fmV %.3fmV \r\n",Board_Name,CurrentChannelValue,ADValues[],ADValues[]);
}
LED0 =!LED0;
delay_ms();
}
具体下载地址:https://download.csdn.net/download/qq_37997682/11240699
STM32-24位AD7799驱动之手册代码详解,支持模拟SPI和硬件SPI的更多相关文章
- 联盛德 HLK-W806 (四): 软件SPI和硬件SPI驱动ST7735液晶LCD
目录 联盛德 HLK-W806 (一): Ubuntu20.04下的开发环境配置, 编译和烧录说明 联盛德 HLK-W806 (二): Win10下的开发环境配置, 编译和烧录说明 联盛德 HLK-W ...
- Linux驱动开发必看详解神秘内核(完全转载)
Linux驱动开发必看详解神秘内核 完全转载-链接:http://blog.chinaunix.net/uid-21356596-id-1827434.html IT168 技术文档]在开始步入L ...
- 联盛德 HLK-W806 (九): 软件SPI和硬件SPI驱动ST7789V液晶LCD
目录 联盛德 HLK-W806 (一): Ubuntu20.04下的开发环境配置, 编译和烧录说明 联盛德 HLK-W806 (二): Win10下的开发环境配置, 编译和烧录说明 联盛德 HLK-W ...
- 联盛德 HLK-W806 (十一): 软件SPI和硬件SPI驱动ST7567液晶LCD
目录 联盛德 HLK-W806 (一): Ubuntu20.04下的开发环境配置, 编译和烧录说明 联盛德 HLK-W806 (二): Win10下的开发环境配置, 编译和烧录说明 联盛德 HLK-W ...
- ALSA声卡驱动中的DAPM详解之七:dapm事件机制(dapm event)
前面的六篇文章,我们已经讨论了dapm关于动态电源管理的有关知识,包括widget的创建和初始化,widget之间的连接以及widget的上下电顺序等等.本章我们准备讨论dapm框架中的另一个机制:事 ...
- ALSA声卡驱动中的DAPM详解之四:在驱动程序中初始化并注册widget和route
前几篇文章我们从dapm的数据结构入手,了解了代表音频控件的widget,代表连接路径的route以及用于连接两个widget的path.之前都是一些概念的讲解以及对数据结构中各个字段的说明,从本章开 ...
- ALSA声卡驱动中的DAPM详解之三:如何定义各种widget
上一节中,介绍了DAPM框架中几个重要的数据结构:snd_soc_dapm_widget,snd_soc_dapm_path,snd_soc_dapm_route.其中snd_soc_dapm_pat ...
- ARM Cortex-M底层技术(2)—启动代码详解
杂谈 工作了一天,脑袋比较乱.一直想把底层的知识写成一个系列,希望可以坚持下去.为什么要写底层的东西呢?首先,工作用到了这部分内容,最近和内部Flash打交道比较多,自然而然会接触到一些底层的东西:第 ...
- ALSA声卡驱动中的DAPM详解之六:精髓所在,牵一发而动全身
设计dapm的主要目的之一,就是希望声卡上的各种部件的电源按需分配,需要的就上电,不需要的就下电,使得整个音频系统总是处于最小的耗电状态,最主要的就是,这一切对用户空间的应用程序是透明的,也就是说,用 ...
随机推荐
- 洛谷 P2388 阶乘之乘 题解
本蒟蒻又来发题解了QwQ; 看到这个题目,本蒟蒻第一眼就想写打个暴力: 嗯,坏习惯: 但是,动动脑子想一想就知道,普通的的暴力是过不了的: 但是,身为蒟蒻的我,也想不出什么高级的数学方法来优化: 好, ...
- CryptoJS中WordArray
目录 WordArray (An array of 32-bit words. 1.1 : 初始化 1.2 : WordArray 对象 ->16进制字符串 1.3 : 16进制字符串 -> ...
- 从FPGA搞定OV7670 VGA显示 移植到 STM32F10x TFT显示 总结及疑问(高手请进)
OV7670不愧是最便宜的摄像头了最大显示像素:640*480(在VGA显示器上显示效果还不赖,用usb模块采集显示依然显著) 第一步:VGA显示 视频图像(实时)FPGA+SDRAM+OV7670= ...
- java动态编译运行代码
import java.io.BufferedReader;import java.io.InputStreamReader;import java.net.URI;import java.util. ...
- 2019年Dubbo你掌握的如何?快看看这30道高频面试题!
前言 Dubbo是一个分布式服务框架,致力于提供高性能和透明化的RPC远程服务调用方案,以及SOA服务治理方案.简单的说,dubbo就是个服务框架,如果没有分布式的需求,其实是不需要用的,只有在分布式 ...
- 11条MySQL规范,你知道的有几个?
一.数据库命令规范 · 所有数据库对象名称必须使用小写字母并用下划线分割 · 所有数据库对象名称禁止使用mysql保留关键字(如果表名中包含关键字查询时,需要将其用单引号括起来) · 数据库对象的命名 ...
- 牛客练习赛36 A Rabbit的字符串(字符串最小表示法)
链接:https://ac.nowcoder.com/acm/contest/328/A来源:牛客网 题目描述 Rabbit得到了一个字符串,她的好朋友xxx可以给这个字符串施加一次魔法. 魔法可以选 ...
- 《Java基础知识》Java锁详解(volatile,synchronized等)
volatile: 让变量每次在使用的时候,都从主存中取. volatile具有synchronized关键字的“可见性”,但是没有synchronized关键字的“并发正确性”,也就是说不保证线程执 ...
- kuangbin专题 数论基础 part1?
线段树专题太难了,那我来做数学吧! 但数学太难了,我......(扯 这两天想了做了查了整理了几道数学. 除了一些进阶的知识,像莫比乌斯反演,杜教筛,min25学不会我跳了,一些基础的思维还是可以记录 ...
- Python基础-day01-3
PyCharm 的初始设置(知道) 目标 恢复 PyCharm 的初始设置 第一次启动 PyCharm 新建一个 Python 项目 设置 PyCharm 的字体显示 PyCharm 的升级以及其他 ...