Turtlebot3新手教程:Open-Manipulator机械臂
*本文针对如何结合turtlebot3和Open-Manipulator机械臂做出讲解
测试在Ubuntu 16.04, Linux Mint 18.1和ROS Kinetic Kame下进行
具体步骤如下:
安装依赖包
sudo apt-get install ros-kinetic-moveit* ros-kinetic-dynamixel-sdk ros-kinetic-dynamixel-workbench-toolbox ros-kinetic-robotis-math ros-kinetic-industrial-core
安装open_manipulator
cd ~/catkin_ws/src/
git clone https://github.com/ROBOTIS-GIT/open_manipulator.git
cd ~/catkin_ws && catkin_make
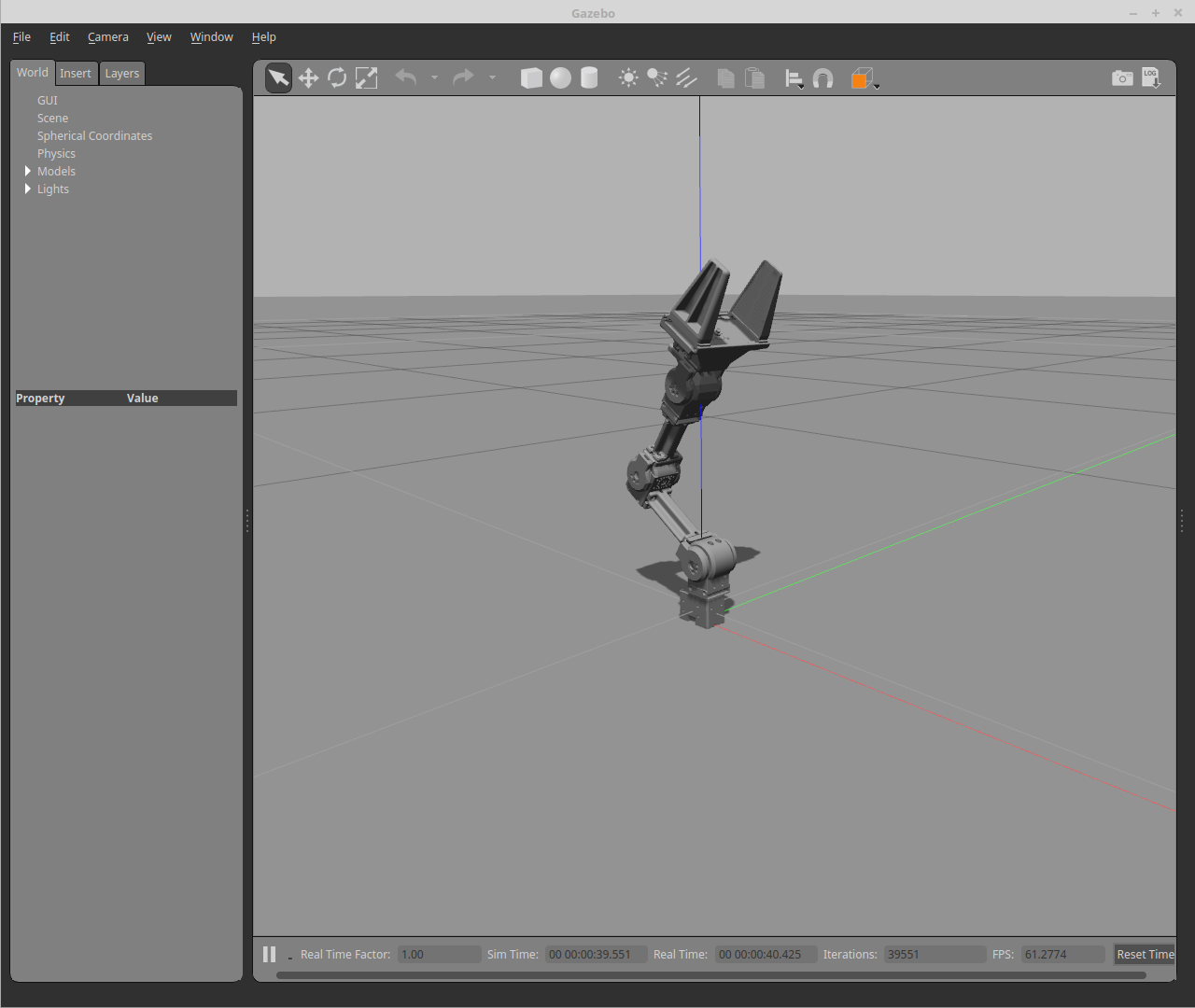
在Gazebo环境中启动Open-Manipulator
roslaunch open_manipulator_gazebo open_manipulator_gazebo.launch

发布话题控制open_manipulator
rostopic pub /open_manipulator_chain/joint2_position/command std_msgs/Float64 "data: 1.0" --once
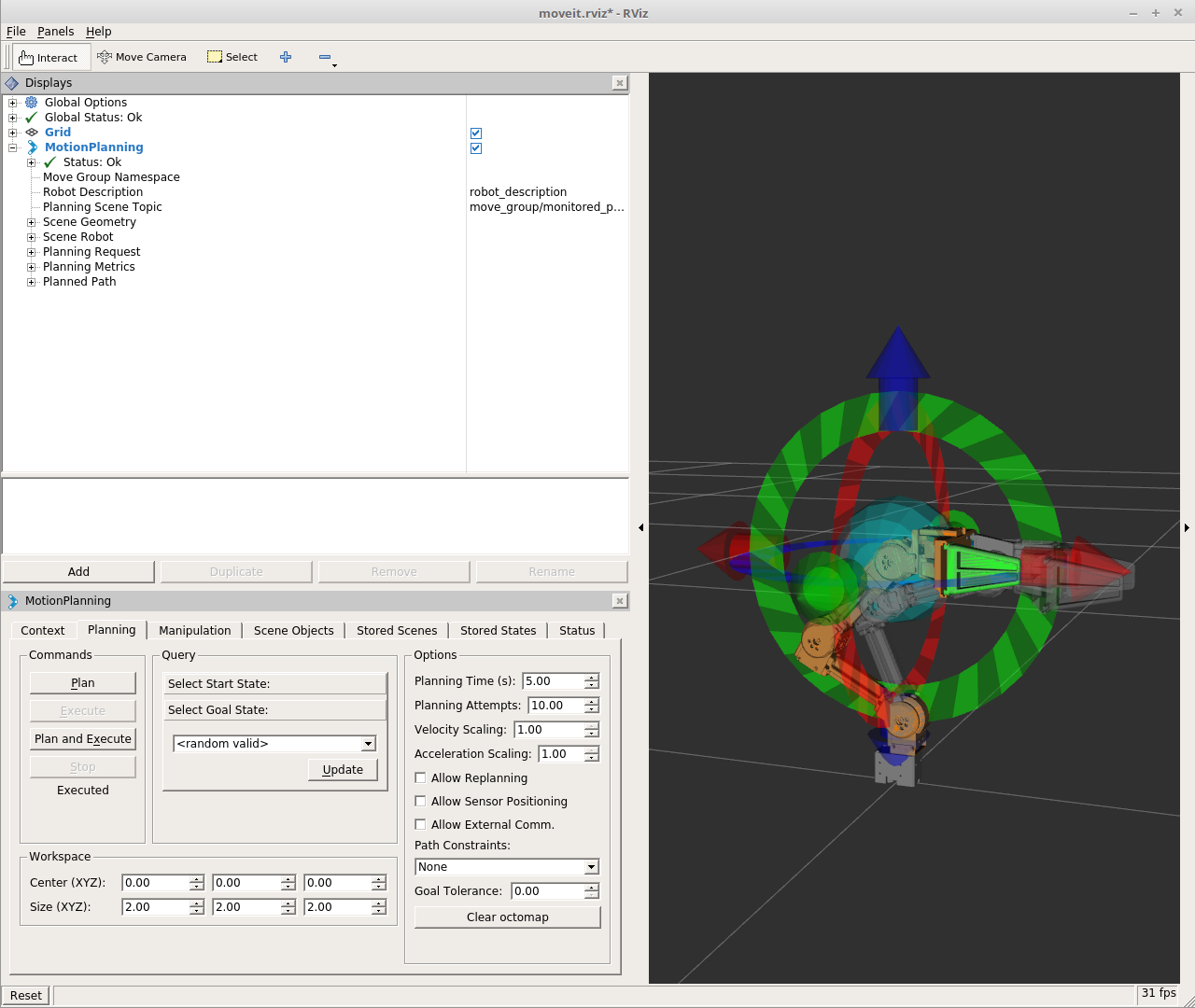
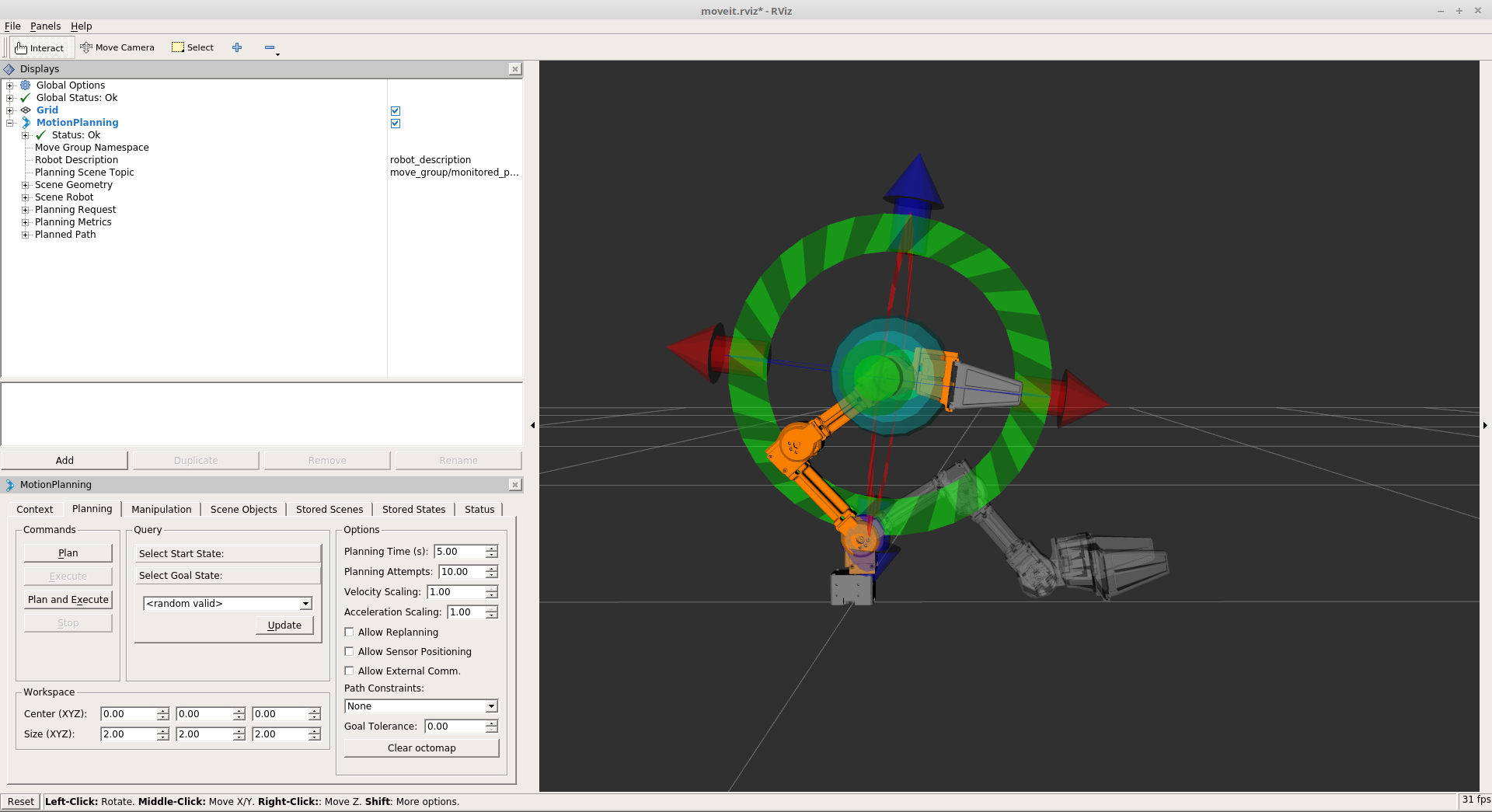
新终端打开,在moveit中使用open_manipulator
roslaunch open_manipulator_moveit open_manipulator_demo.launch use_gazebo:=true
发布话题控制机械爪
rostopic pub /robotis/open_manipulator/gripper std_msgs/String "data: 'grip_on'" --once
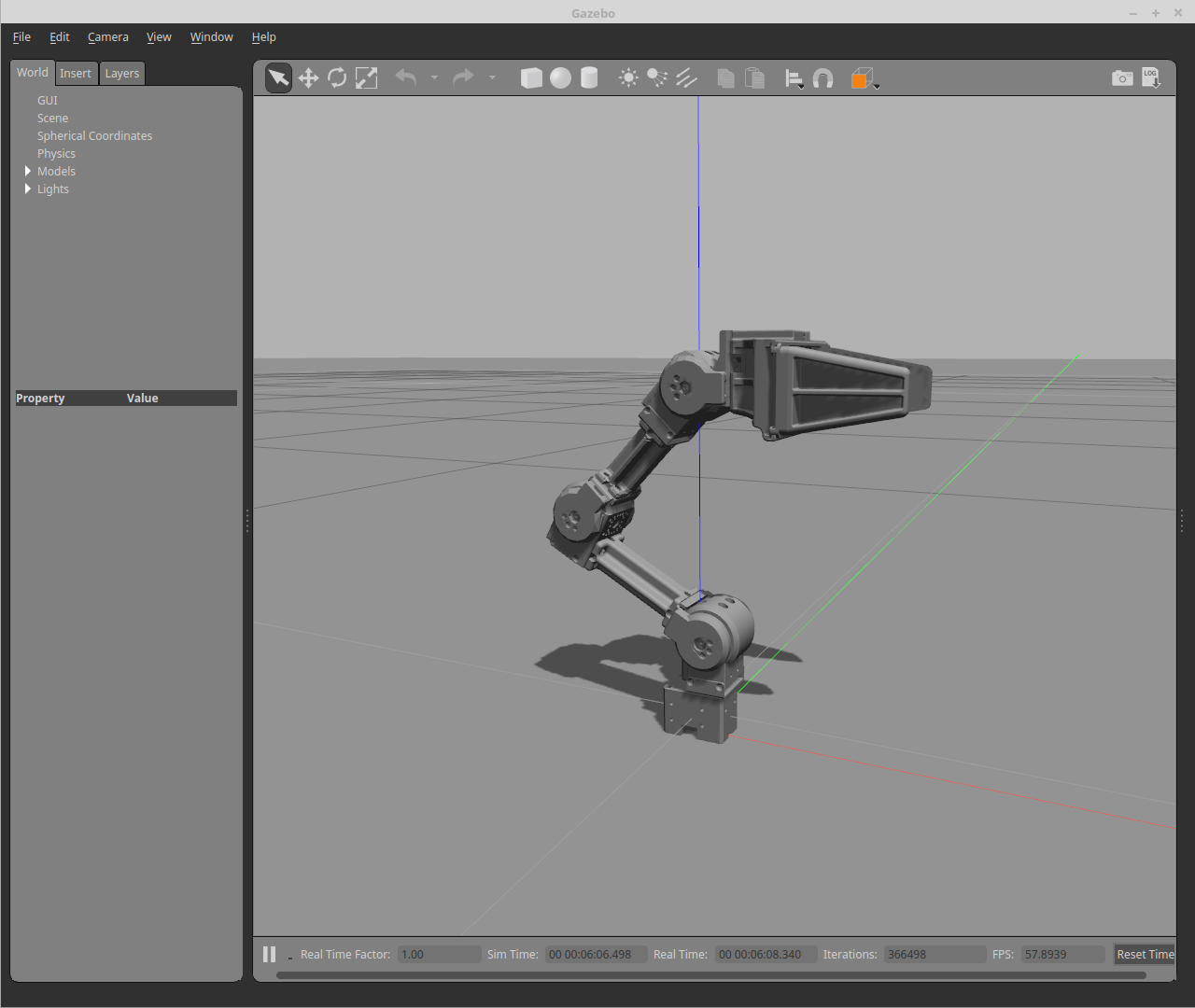
机械臂平台:
启动dynamixel系列的Open-Manipulator
roslaunch open_manipulator_dynamixel_ctrl dynamixel_controller.launch
利用moveit控制
roslaunch open_manipulator_moveit open_manipulator_demo.launch
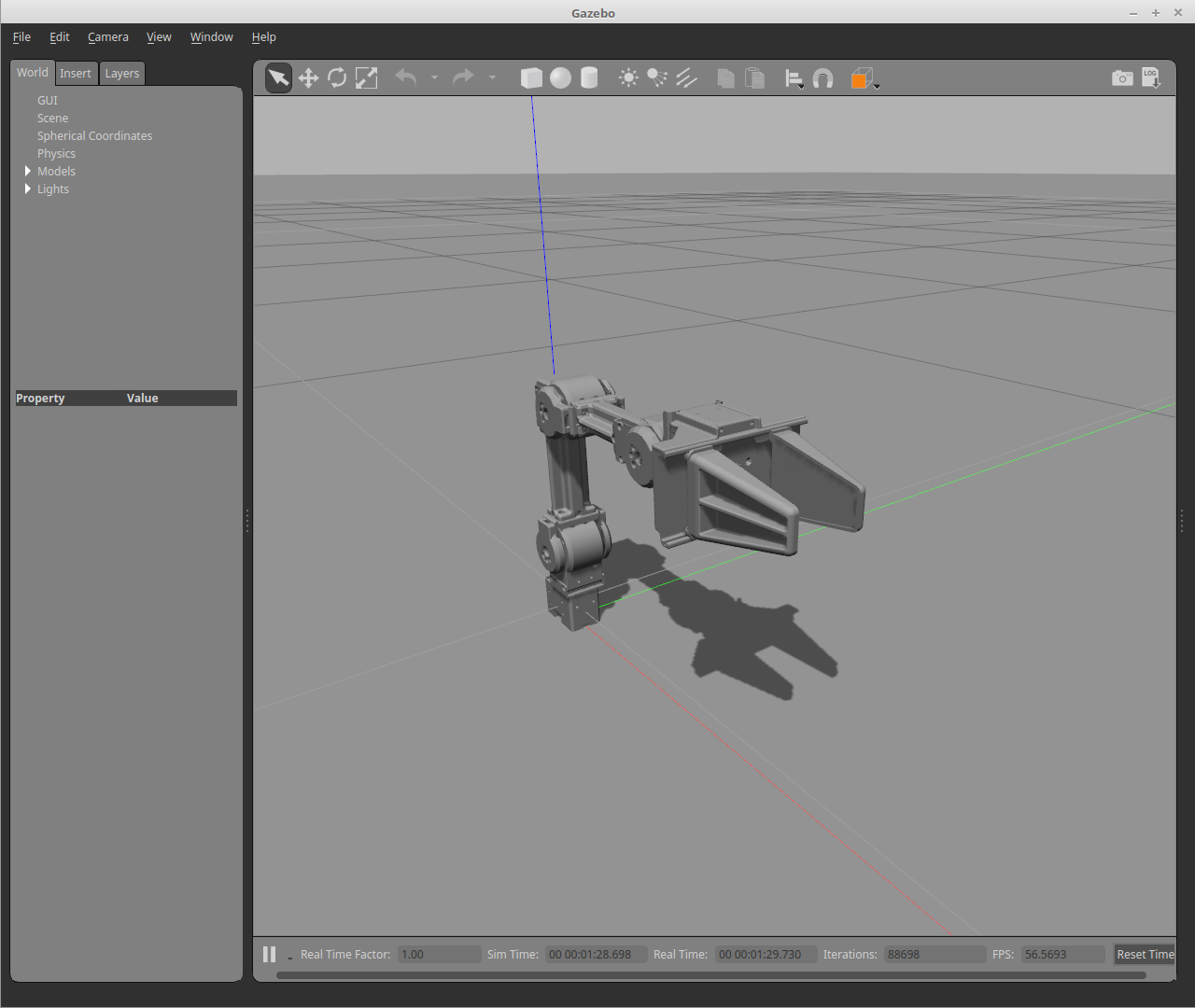
Turtlebot3-waffle结合Open-Manipulator
安装依赖:
cd ~/catkin_ws/src
git clone https://github.com/ROBOTIS-GIT/turtlebot3.git
cd ~/catkin_ws && catkin_make
启动rviz并显示模型
roslaunch open_manipulator_with_tb3 open_manipulator_chain_with_tb3_rviz.launch

Turtlebot3新手教程:Open-Manipulator机械臂的更多相关文章
- Turtlebot3新手教程-应用-跟随
本文针对如何利用Turtlebot3可实现的各种应用进行讲解 具体步骤如下: [Remote PC]安装应用包 cd ~/catkin_ws/src git clone https://github. ...
- Turtlebot3新手教程:仿真
本文章针对如何利用turtlebot3实现仿真功能进行讲解 测试环境:Ubuntu 16.04 和 ROS Kinetic Kame. 注意:TurtleBot3 Simulation 依赖 turt ...
- Turtlebot3新手教程:OpenCR软件设置(shell)
*本文针对如何利用脚本来更新固件进行讲解 具体步骤如下: burger的固件更新 $ export OPENCR_PORT=/dev/ttyACM0 $ export OPENCR_MODEL=bur ...
- ROS连接ABB机械臂调试详细教程-ROS(indigo)和ABB RobotStudio 6.03.02-
在ROS industrial介绍中,给出了ROS和常用机械臂的连接方式.具体信息可以参考:http://wiki.ros.org/Industrial ROS连接ABB机械臂调试详细教程-ROS(i ...
- ROS探索总结(三)——ROS新手教程【转】
转自:http://blog.csdn.net/hcx25909/article/details/8811313 版权声明:本文为博主原创文章,未经博主允许不得转载. 目录(?)[-] 一ROS的 ...
- 机械臂运动学逆解(Analytical solution)
计算机器人运动学逆解首先要考虑可解性(solvability),即考虑无解.多解等情况.在机器人工作空间外的目标点显然是无解的.对于多解的情况从下面的例子可以看出平面二杆机械臂(两个关节可以360°旋 ...
- ROS探索总结(三)——ROS新手教程
转自古-月 http://blog.csdn.net/hcx25909 前面我们介绍了ROS的特点和结构,接下来就要开始准备动手感受一下ROS的强大了. ROS官网的wiki上针对新手的教程很详细,最 ...
- 基于 Mathematica 的机器人仿真环境(机械臂篇)[转]
完美的教程,没有之一,收藏学习. 目的 本文手把手教你在 Mathematica 软件中搭建机器人的仿真环境,具体包括以下内容(所使用的版本是 Mathematica 11.1,更早的版本可能缺少某些 ...
- OpenManipulator RM-X52 ROS 开源机械臂
DYNAMIXEL PRO PH54-200-S500-R 简介
随机推荐
- 第2.3节 Python运算符大全
一. Python的算术运算 Python的算术运算符与C语言类似,略有不同.包括加(+).减(-).乘(*).除(/).取余(%).按位或(|).按位与(&).按位求补(~).左移位(< ...
- PyQt(Python+Qt)学习随笔:Qt Designer中toolBar的toolButtonStyle属性
tooButtonStyle属性保存主工具栏按钮的样式设置,用来表示工具栏按钮的文字和图标怎么显示. 该属性的可设置值类型为枚举类型Qt.ToolButtonStyle,它包含如下值: 该属性的缺省值 ...
- PyQt(Python+Qt)学习随笔:Qt Designer中主窗口对象的dockOptions属性
dockOptions属性代表主窗口对浮动部件停靠的反应,其类型为枚举类型QMainWindow.DockOptions.相关取值及含义如下: 这些枚举值可以组合使用,仅控制如何在QMainWindo ...
- 题解-CF1239D Catowice City
CF1239D Catowice City 有 \(n\) 个人和 \(n\) 只猫.有 \(m\) 对人猫友谊,即第 \(u_i\) 个人认识第 \(v_i\) 只猫,保证第 \(i\) 个人和第 ...
- CentOS7 扩容磁盘非根分区
CentOS7扩展磁盘分区 因为业务所在分区空间不足,需要扩容.分配磁盘大小为1T但实际使用过程中发现仅使用了500G左右空间,本次计划在原有磁盘上扩容1T,加上之前500G空闲直接扩容1.5TB ...
- STL——容器(List)list 的反序排列
list.reverse(); //反转链表,比如list包含1, 2, 3, 4, 5五个元素,运行此方法后,list就包含5, 4, 3, 2, 1元素. 1 #include <iostr ...
- 【ubantu下安装python3.6】
Ubuntu16.04默认安装了Python2.7和3.5 请注意,系统自带的python千万不能卸载! 输入命令python
- OkHttpClient调优案例
OkHttpClient调优案例 作者:Grey 原文地址: 语雀 博客园 Github 实际案例 系统运行一段时间后,线程数量飙升,CPU持续居高不下 排查工具 https://fastthread ...
- 2020-2021-1 20209307 《Linux内核原理与分析》第二周作业
1.寻址方式和常用汇编指令 寄存器寻址:movl %eax,%edx 相当于edx=eax 立即寻址:movl $0x123,%edx 相当于edx=0x123 直接寻址:movl 0x123, ...
- 从苹果BigSur官网学点东西
从苹果BigSur官网学点东西 Awsome配色 这个 蓝紫渐变大底 + 简洁的 矩形状字块 + 粗细层次字形,看着就蛮舒服. 看看css配色: .section-hero div[data-comp ...