Turtlebot3新手教程-应用-跟随
本文针对如何利用Turtlebot3可实现的各种应用进行讲解
具体步骤如下:
[Remote PC]安装应用包
cd ~/catkin_ws/src
git clone https://github.com/ROBOTIS-GIT/turtlebot3_applications.git
cd ~/catkin_ws && catkin_make
TurtleBot跟随演示
注意:需要在无障碍环境进行,只需要使用HLS-LFCD LDS雷达即可
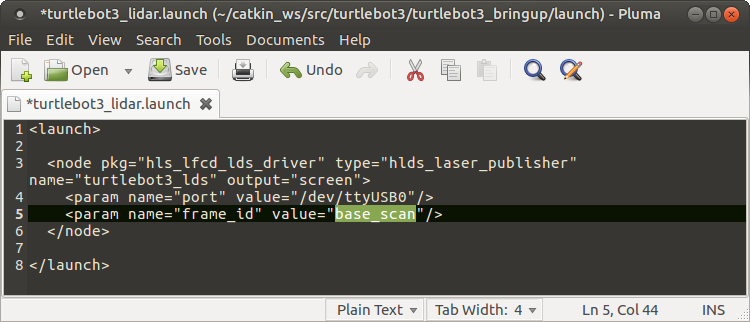
[TurtleBot] 更改配置
vim ~/catkin_ws/src/turtlebot3/turtlebot3_bringup/launch/turtlebot3_lidar.launch
修改前:
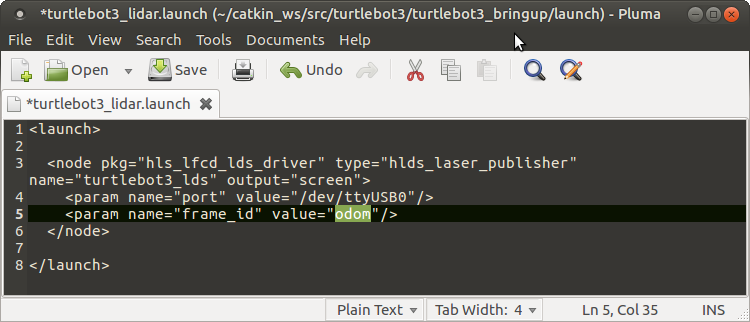
修改后:
[Remote PC]安装依赖包
sudo apt-get install python-pip
sudo pip install -U scikit-learn numpy scipy
sudo pip install --upgrade pip
测试:
[Remote PC] 运行roscore
Roscore
[TurtleBot] 启动burger
roslaunch turtlebot3_bringup turtlebot3_robot.launch
[Remote PC] 启动filter
roslaunch turtlebot3_follow_filter turtlebot3_follow_filter.launch
[Remote PC] 启动跟随
cd ~/catkin_ws/src/turtlebot3_applications/turtlebot3_follower/src
rosrun turtlebot3_follower follower.py
TurtleBot全景演示
turtlebot3_panorama演示通过使用pano_ros来实现全景图
依赖:Raspicam,参考Raspicam:(https://github.com/UbiquityRobotics/raspicam_node)
依赖:OpenCV和cvbridge ,参考opencv(http://docs.opencv.org/2.4/doc/tutorials/introduction/linux_install/linux_install.html)
[TurtleBot]启动Raspberry Pi cam V2
roslaunch raspicam_node camerav2_1280x960.launch
[Remote PC] 启动panorama
roslaunch turtlebot3_panorama panorama.launch
[Remote PC] 开始全景图制作
rosservice call turtlebot3_panorama/take_pano 0 360.0 30.0 0.3
参数设置:
模式:
0 : 旋转拍照 (例如:旋转,停止,拍照,旋转,停止,拍照...)
1 : 持续(拍照时要保持旋转)
2 : 停止拍照和创建全景图
全景图像的总角度(角度)
角度间隔 (角度) 用于旋转拍照模式 或 时间间隔 (秒) 用于其他模式
旋转速度 (弧度/秒)
[Remote PC] 查看结果
rqt_image_view image:=/turtlebot3_panorama/panorama
Turtlebot3新手教程-应用-跟随的更多相关文章
- Turtlebot3新手教程:仿真
本文章针对如何利用turtlebot3实现仿真功能进行讲解 测试环境:Ubuntu 16.04 和 ROS Kinetic Kame. 注意:TurtleBot3 Simulation 依赖 turt ...
- Turtlebot3新手教程:Open-Manipulator机械臂
*本文针对如何结合turtlebot3和Open-Manipulator机械臂做出讲解 测试在Ubuntu 16.04, Linux Mint 18.1和ROS Kinetic Kame下进行 具体步 ...
- Turtlebot3新手教程:OpenCR软件设置(shell)
*本文针对如何利用脚本来更新固件进行讲解 具体步骤如下: burger的固件更新 $ export OPENCR_PORT=/dev/ttyACM0 $ export OPENCR_MODEL=bur ...
- Web项目的发布新手教程
ASP.NET服务器发布新手教程 ——本文仅赠予第一次做Web项目,需要发布的新手们,转载的请注明出处. 首先我们说一下我们的需要的一个环境.我使用的是Visual Studio 2010,版本.NE ...
- APP设计尺寸规范大全,APP界面设计新手教程【官方版】(转)
正值25学堂一周年之际,同时站长和APP设计同仁们在群里(APP界面设计 UI设计交流群,APP界面设计⑥群 APPUI设计③群58946771 APP设计资源⑤群 386032923欢迎大家加入交流 ...
- ROS探索总结(三)——ROS新手教程【转】
转自:http://blog.csdn.net/hcx25909/article/details/8811313 版权声明:本文为博主原创文章,未经博主允许不得转载. 目录(?)[-] 一ROS的 ...
- 新手教程之使用Xib自定义UITableViewCell
新手教程之使用Xib自定义UITableViewCell 前言 首先:什么是UITableView?看图 其次:什么是cell? 然后:为什么要自定cell,UITableView不是自带的有cell ...
- MATLAB新手教程
MATLAB新手教程 .MATLAB的基本知识 1-1.基本运算与函数 在MATLAB下进行基本数学运算,仅仅需将运算式直接打入提示号(>>)之後,并按入Enter键就可以.比如 ...
- 【OpenCV十六新手教程】OpenCV角检测Harris角点检测
本系列文章由@浅墨_毛星云 出品.转载请注明出处. 文章链接:http://blog.csdn.net/poem_qianmo/article/details/29356187 作者:毛星云(浅墨) ...
随机推荐
- 第15.42节、PyQt输入部件:QFontComboBox、QLineEdit、QTextEdit、QPlainText功能详解
专栏:Python基础教程目录 专栏:使用PyQt开发图形界面Python应用 专栏:PyQt入门学习 老猿Python博文目录 一.引言 输入部件量比较多,且功能很丰富,但除了用于编写编辑器.浏览器 ...
- Python中sort、sorted的cmp参数废弃之后使用__lt__支持复杂比较的方法
Python2.1以前的排序比较方法只提供一个cmp比较函数参数,没有__lt__等6个富比较方法, Python 2.1引入了富比较方法,Python3.4之后作废了cmp参数.相应地从Python ...
- 第15.23节 PyQt(Python+Qt)入门学习:Model/View架构中QListView视图配套Model的开发使用
老猿Python博文目录 专栏:使用PyQt开发图形界面Python应用 老猿Python博客地址 一.概述 QListView理论上可以和所有QAbstractItemModel派生的类如QStri ...
- 安卓学习02---room
title: 安卓学习02---room date: 2020-02-02 18:20:13 tags: room是jetpack的组件,可以使程序流畅的访问sqlite. <!--more - ...
- instanceof constructor Object.prototype.tostring.call ( [] )区别 数组和 对象的3中方法
- 学习笔记:Splay
代码适中.非常灵活的平衡树. 需要前置:二叉搜索树. 一些基础的函数: int idx, ch[N][2], cnt[N], sz[N], fa[N]; /* idx 是节点计数, ch[i][0 / ...
- js-enter提交表单导致页面刷新问题
问题:当页面只有一个文本框时,使用键盘enter操作执行提交表单的时候,会导致页面进行刷新,并且参数也会自动添加到url中. 解决办法: 1.给form添加onsubmit=return false; ...
- 微信小程序api拦截器
微信小程序api拦截器 完美兼容原生小程序项目 完美兼用小程序api的原本调用方式,无痛迁移 小程序api全Promise化 和axios一样的请求方式 小程序api自定义拦截调用参数和返回结果 强大 ...
- 云图说 | 云上资源管控有神器!关于IAM,你想知道的都在这里!
摘要:统一身份认证(Identity and Access Management,简称IAM)是华为云上帮助您安全控制华为云资源访问权限的基础服务.通过本期云图说,您可以初步了解IAM的基本功能. 从 ...
- vue 事件函数传参
事件函数传参 在元素绑定事件时候,如果我们的函数没有传参,他也会有一个默认的传参值 event 但是如果我们的函数有传参,那么它必须作为做为最后一个传参值显示传递,且必须为$event 通过代码打印我 ...