Turtlebot3新手教程:Open-Manipulator机械臂
*本文针对如何结合turtlebot3和Open-Manipulator机械臂做出讲解
测试在Ubuntu 16.04, Linux Mint 18.1和ROS Kinetic Kame下进行
具体步骤如下:
安装依赖包
sudo apt-get install ros-kinetic-moveit* ros-kinetic-dynamixel-sdk ros-kinetic-dynamixel-workbench-toolbox ros-kinetic-robotis-math ros-kinetic-industrial-core
安装open_manipulator
cd ~/catkin_ws/src/
git clone https://github.com/ROBOTIS-GIT/open_manipulator.git
cd ~/catkin_ws && catkin_make
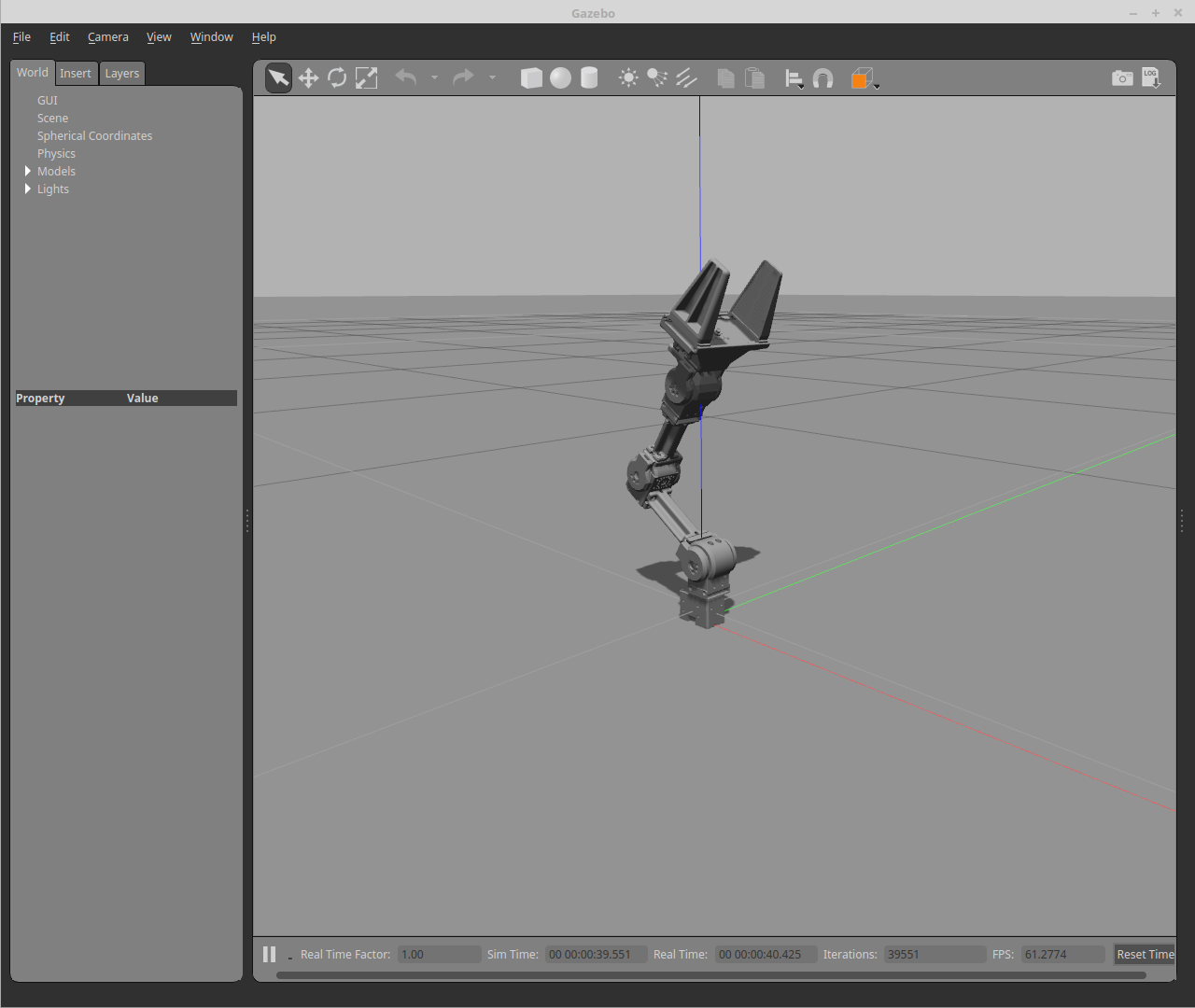
在Gazebo环境中启动Open-Manipulator
roslaunch open_manipulator_gazebo open_manipulator_gazebo.launch

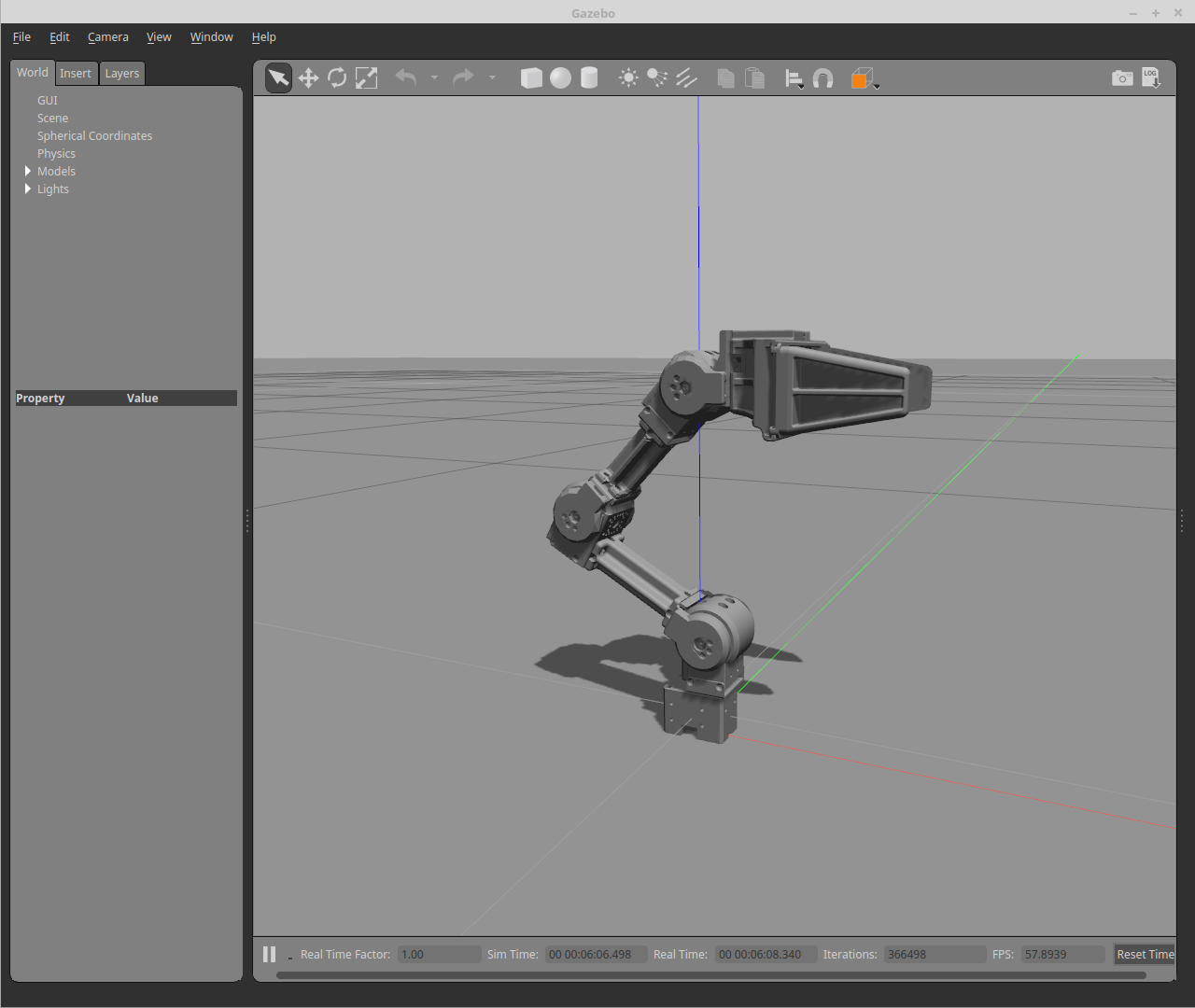
发布话题控制open_manipulator
rostopic pub /open_manipulator_chain/joint2_position/command std_msgs/Float64 "data: 1.0" --once
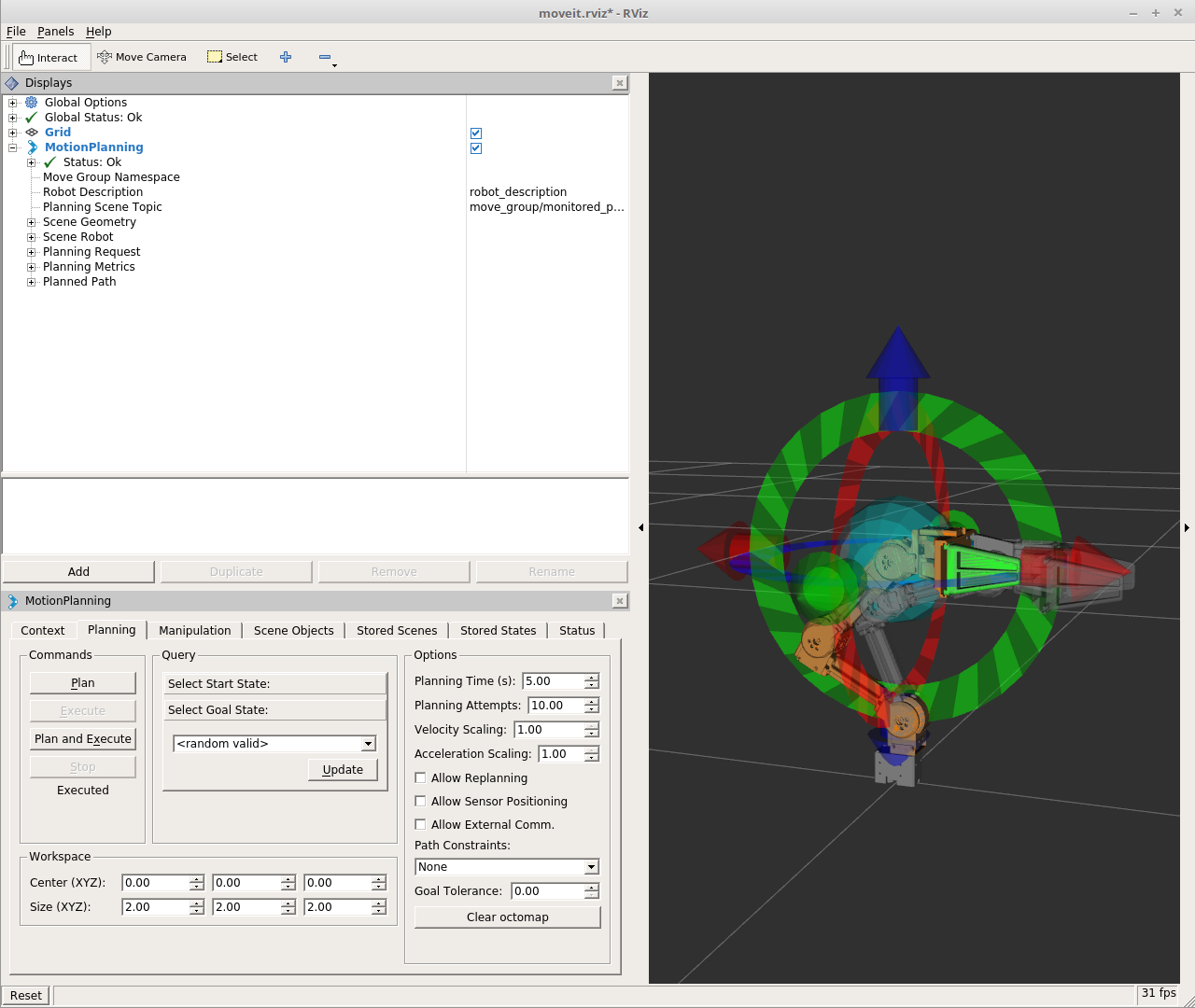
新终端打开,在moveit中使用open_manipulator
roslaunch open_manipulator_moveit open_manipulator_demo.launch use_gazebo:=true
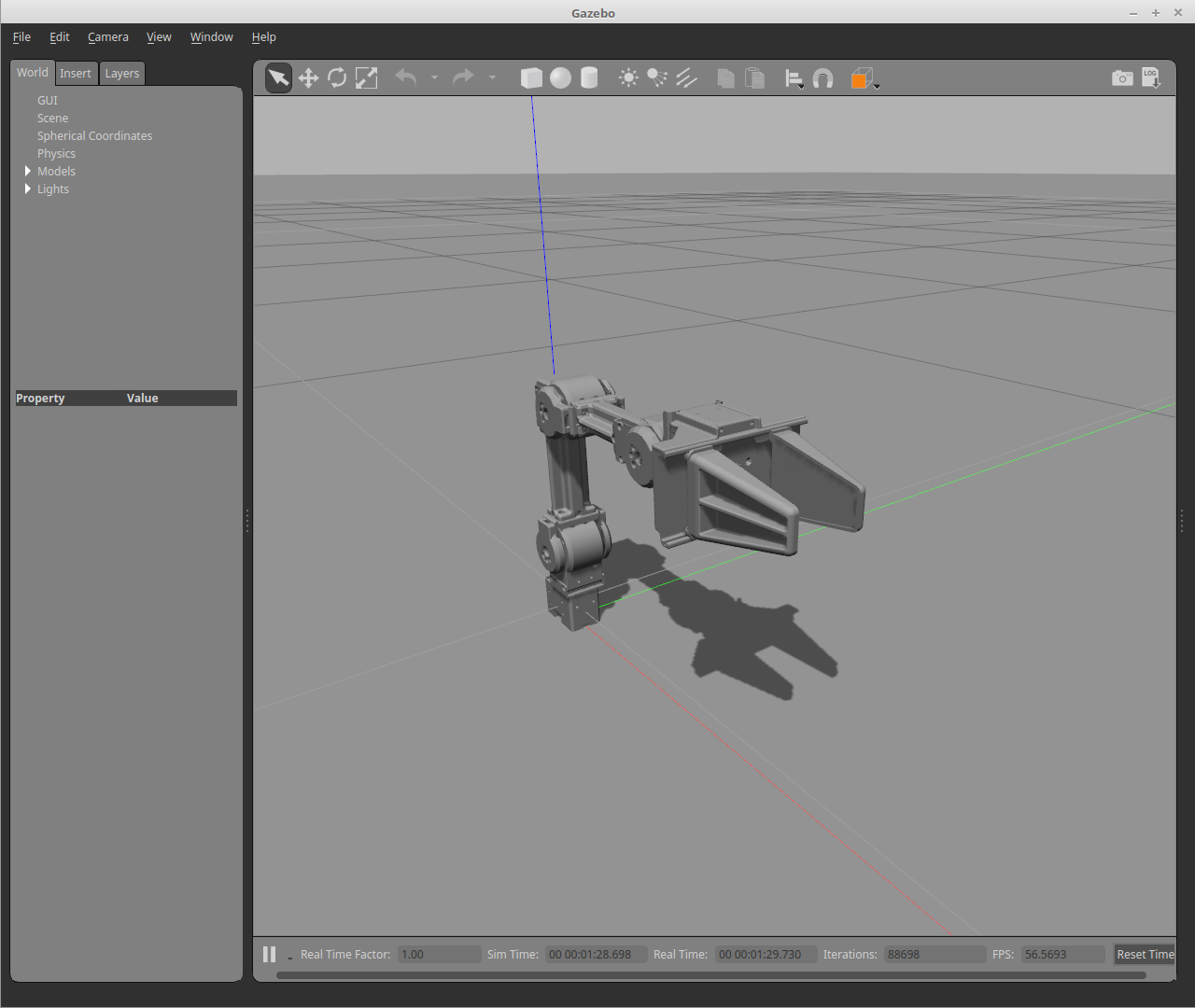
发布话题控制机械爪
rostopic pub /robotis/open_manipulator/gripper std_msgs/String "data: 'grip_on'" --once
机械臂平台:
启动dynamixel系列的Open-Manipulator
roslaunch open_manipulator_dynamixel_ctrl dynamixel_controller.launch
利用moveit控制
roslaunch open_manipulator_moveit open_manipulator_demo.launch
Turtlebot3-waffle结合Open-Manipulator
安装依赖:
cd ~/catkin_ws/src
git clone https://github.com/ROBOTIS-GIT/turtlebot3.git
cd ~/catkin_ws && catkin_make
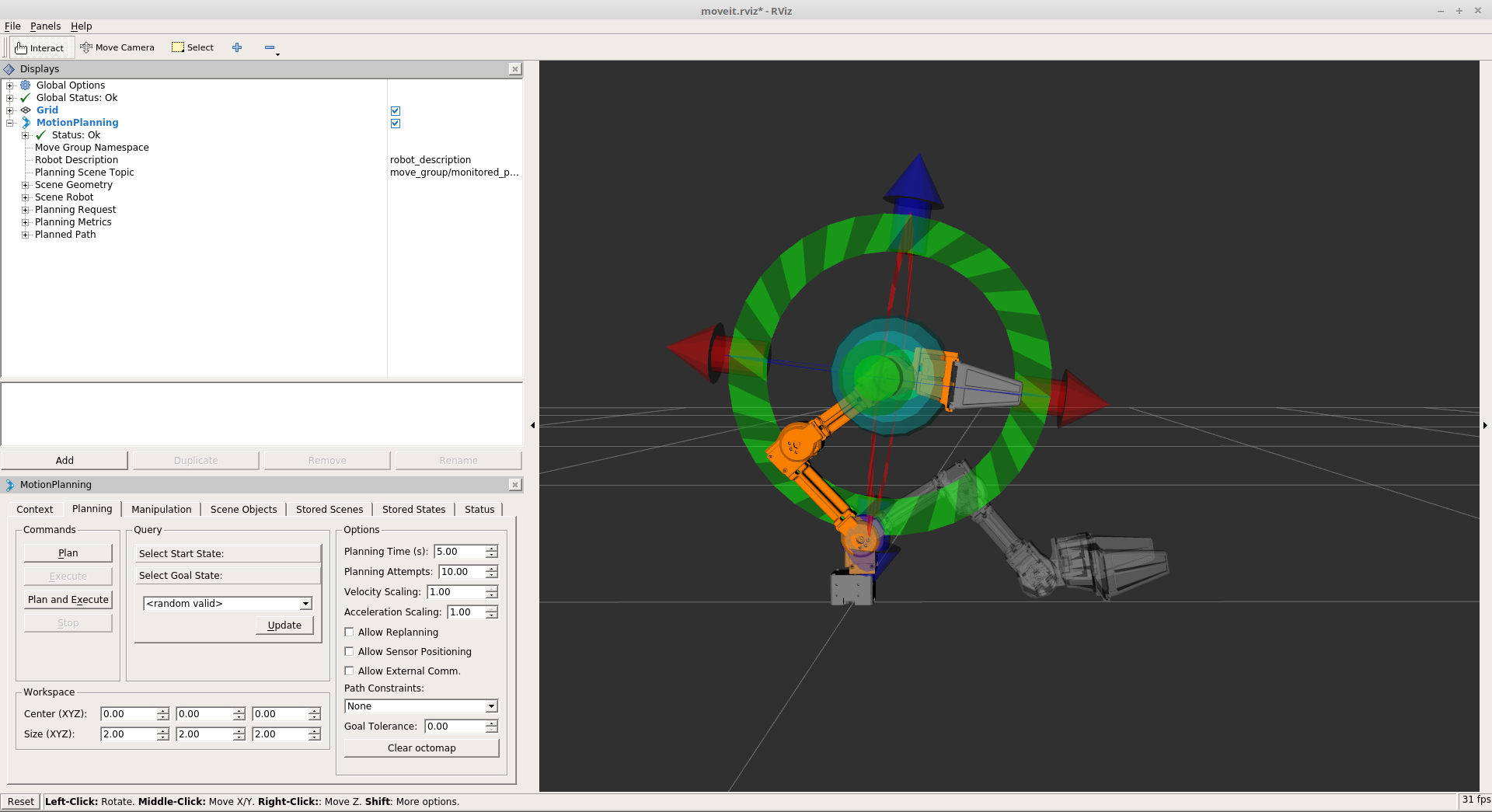
启动rviz并显示模型
roslaunch open_manipulator_with_tb3 open_manipulator_chain_with_tb3_rviz.launch

Turtlebot3新手教程:Open-Manipulator机械臂的更多相关文章
- Turtlebot3新手教程-应用-跟随
本文针对如何利用Turtlebot3可实现的各种应用进行讲解 具体步骤如下: [Remote PC]安装应用包 cd ~/catkin_ws/src git clone https://github. ...
- Turtlebot3新手教程:仿真
本文章针对如何利用turtlebot3实现仿真功能进行讲解 测试环境:Ubuntu 16.04 和 ROS Kinetic Kame. 注意:TurtleBot3 Simulation 依赖 turt ...
- Turtlebot3新手教程:OpenCR软件设置(shell)
*本文针对如何利用脚本来更新固件进行讲解 具体步骤如下: burger的固件更新 $ export OPENCR_PORT=/dev/ttyACM0 $ export OPENCR_MODEL=bur ...
- ROS连接ABB机械臂调试详细教程-ROS(indigo)和ABB RobotStudio 6.03.02-
在ROS industrial介绍中,给出了ROS和常用机械臂的连接方式.具体信息可以参考:http://wiki.ros.org/Industrial ROS连接ABB机械臂调试详细教程-ROS(i ...
- ROS探索总结(三)——ROS新手教程【转】
转自:http://blog.csdn.net/hcx25909/article/details/8811313 版权声明:本文为博主原创文章,未经博主允许不得转载. 目录(?)[-] 一ROS的 ...
- 机械臂运动学逆解(Analytical solution)
计算机器人运动学逆解首先要考虑可解性(solvability),即考虑无解.多解等情况.在机器人工作空间外的目标点显然是无解的.对于多解的情况从下面的例子可以看出平面二杆机械臂(两个关节可以360°旋 ...
- ROS探索总结(三)——ROS新手教程
转自古-月 http://blog.csdn.net/hcx25909 前面我们介绍了ROS的特点和结构,接下来就要开始准备动手感受一下ROS的强大了. ROS官网的wiki上针对新手的教程很详细,最 ...
- 基于 Mathematica 的机器人仿真环境(机械臂篇)[转]
完美的教程,没有之一,收藏学习. 目的 本文手把手教你在 Mathematica 软件中搭建机器人的仿真环境,具体包括以下内容(所使用的版本是 Mathematica 11.1,更早的版本可能缺少某些 ...
- OpenManipulator RM-X52 ROS 开源机械臂
DYNAMIXEL PRO PH54-200-S500-R 简介
随机推荐
- Flutter——Dart Extension扩展方法的使用
dart的extension方法可以给已经存在的类添加新的函数,通过extension我们可以封装一些常用方法,提高开发效率. 例一:扩展String 给string添加一个log打印方法 exten ...
- 第3.2节 Python列表简介
鉴于Python中列表(list)的强大功能,本节及后面至少有一节都是介绍列表相关的知识,本节先介绍基本的列表知识. 一. 列表的定义 列表是一种可以修改的序列,它有点类似于c语言中的数组,在Pyth ...
- Mysql 存储过程(变量、定义条件、处理程序、光标、流程控制构造)
最近由于有同事编写了存储函数,需要进行验证,但是对存储过程一直不是很了解,所以抽时间了解了一下存储过程的基本语法.本篇文章主要包括介绍了存储过程的5个小语法:declare语句的变量.定义条件.处理程 ...
- C++ 虚函数表与多态 —— 多重继承的虚函数表 & 内存布局
多重继承的虚函数表会有两个虚表指针,分别指向两个虚函数表,如下代码中的 vptr_s_1.vptr_s_2,Son类继承自 Father 和 Mather 类,并且改写了 Father::func_1 ...
- Python之re正则
1. 基本规则 # 元字符: # . ^ $ * + ? { } [ ] | ( ) \ # 字符类型匹配: # . 表示匹配任意一个字符(换行符除外) # [asdf] 表示匹配中括号里面的任意一个 ...
- Day11 python高级特性-- 迭代器 Iterator
直接可以作用于for循环的数据类型有以下几种: • 集合数据类型: list.tuple.dict.set.str • Generator: 生成器 和 带 y ...
- java基础:switch语句应用,循环的详细介绍以及使用,附练习案列
1. switch语句 1.1 分支语句switch语句 格式 switch (表达式) { case 1: 语句体1; break; case 2: 语句体2; break; ... default ...
- 用Wireshark对Android应用的网络流量进行抓包
通过Wireshark.Charles.Burpsuite等工具分析网络流量的过程,又叫做抓包. 为何需要抓包 测试手机应用(如搜狗号码通.搜狗手机浏览器)的功能时,经常遇到与网络交互的场景,这时候我 ...
- ASP.NET Core 中间件 自定义全局异常中间件以及 MVC异常过滤器作用
中间件是一种装配到应用管道以处理请求和响应的软件. 每个组件: 选择是否将请求传递到管道中的下一个组件. 可在管道中的下一个组件前后执行工作. 请求委托用于生成请求管道. 请求委托处理每个 HTTP ...
- SpringCloud 源码系列(5)—— 负载均衡 Ribbon(下)
SpringCloud 源码系列(4)-- 负载均衡 Ribbon(上) SpringCloud 源码系列(5)-- 负载均衡 Ribbon(下) 五.Ribbon 核心接口 前面已经了解到 Ribb ...