电赛控制类PID算法实现
一、什么是PID
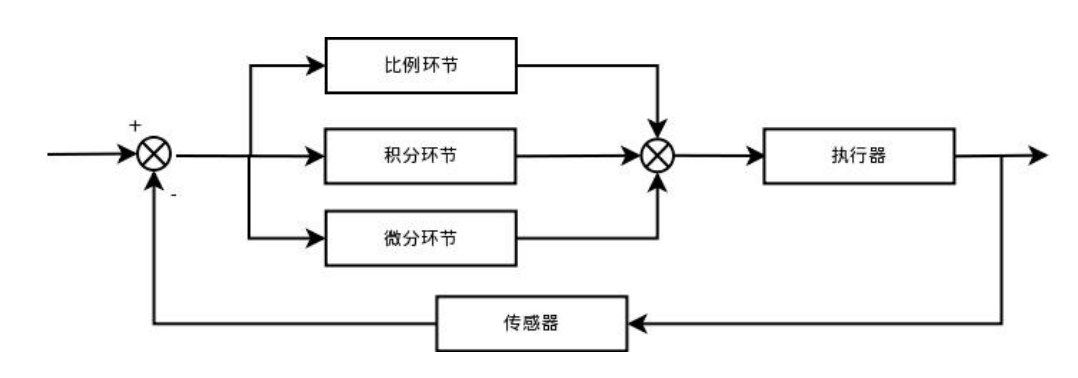
学过自动控制原理的对PID并不陌生,PID控制是对偏差信号e(t)进行比例、积分和微分运算变换后形成的一种控制规律。PID 算法的一般形式:

- PID控制系统原理框图
二、PID离散化
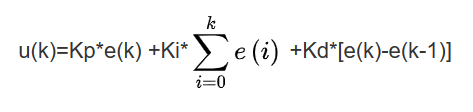
对PID连续系统离散化,从而方便在处理器上实现,PID 离散表示形式:

离散化后最终得到位置式PID:

u(k)为控制器输出的控制量;(输出)
e(k)为偏差信号,它等于给定量与输出量之差;(输入)
Kp 为比例系数;
Ti 为积分时间常数;
Td 为微分时间常数。
1. 位置式PID公式
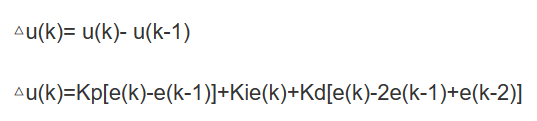
2. 增量式PID公式
三、两种PID的不同点
- 位置式
是一种非递推算法,输出值U(k)和执行机构的实际位置一一对应,在不带积分部件的对象中可以很好的应用。但是每次输出均与过去的状态有关,计算量大。 - 增量式
输出的是增量,控制增量的值仅与最近3次采样值有关,不需要累计偏差,运算量小,计算错误影响小。但会积分截断效应大,有稳态误差。
四、C语言程序实现
- pid.c
#include "pid.h"
/*定义PID参数结构体*/
typedef struct _PID
{
float Kp,Ki,Kd;//比例系数、积分系数、微分系数
float SetValue,ActualValue;//目标值、实际值
float Error;//第K次误差
float LastError;//第K-1次误差
float PreError;//第K-2次误差
float SumError;//累计偏差
float Integral,MaxI;//积分、积分限幅
float Output,MaxOut;//输出、输出限幅
}PID;
/************************************************
*@brief :位置式PID控制器
*@param :PID结构体变量地址,当前实际值
*@retval : 期望输出值
*************************************************/
int32_t Position_PID_Control(PID *pid,float Cur_Value)
{
pid->Error=pid->SetValue-Cur_Value; //计算偏差
pid->SumError +=pid->Error;//累计偏差
pid->ActualValue=(pid->Kp*(pid->Error-pid->LastError))//比例环节
+(pid->Ki*pid->SumError)//积分环节
+(pid->Kd*(pid->Error-pid->LastError);//微分环节
pid->LastError=pid->Error;
return ((int32_t)pid->ActualValue); //返回计算值
}
/************************************************
*@brief :速度闭环PID控制
*@param :PID结构体变量地址,当前实际值
*@retval : 期望输出值
*************************************************/
int32_t Inc_Pid_Ctrl(PID *pid,float Cur_Value)
{
pid->Error=pid->SetValue-Cur_Value; //计算偏差
pid->ActualValue +=(pid->Kp*(pid->Error-pid->LastError))//比例环节
+(pid->Ki*(pid->Error))//积分环节
+(pid->Kd*(pid->Error-2*pid->LastError+pid->PreError));//微分环节
pid->PreError=pid->LastError;//存储偏差,进行下次计算
pid->LastError=pid->Error;
return ((int32_t)pid->ActualValue); //返回计算值
}
电赛控制类PID算法实现的更多相关文章
- PID算法通俗理解,平衡车,倒立摆,适合不理解PID算法的人来看!
先插句广告,本人QQ522414928,不熟悉PID算法的可以一起交流学习,随时在线(PID资料再我的另一篇博客里) 倒立摆资料连接↓ https://www.cnblogs.com/LiuXinyu ...
- PID控制及整定算法
一.PID控制算法 PID是比例.积分.微分的简称,PID控制的难点不是编程,而是控制器的参数整定.参数整定的关键是正确地理解各参数的物理意义,PID 控制的原理可以用人对炉温的手动控制来理解.阅读本 ...
- PID算法控制简单理解
1 传统的位式控制算法 用户期望值Sv(设定值)经控制算法输出一个输出信号OUT,输出信号加载到执行部件上(像MOS管等)对控制对象进行控制(步进电机.加热器等),控制对象的当前值(Pv)如速度通过传 ...
- PID算法控制直流电机笔记
1.将偏差的比例.积分和微分通过线性组合构成控制量,用这一控制量对被控对象进行控制,这样的控制器称为PID控制器.简单说就是根据系统的误差,利用比例.积分.微分计算出控制量进行控制. 2.为什么需要P ...
- c# PID算法入门
离开工控行业已经有一段时间了,最近回忆起以前的工作,又对 PID 算法有了兴趣.所以写了一个小项目,希望可以帮到需要的人,也算是对那段工作经历的一个总结. 这是一个 winform 的项目.负载是一个 ...
- PID算法的C语言实现
1.根据我控制算法类文章中关于PID的理论的一些描述,同时也根据网络上一些其他的PID文章,以及自己最近一个项目的实践后,总结了几套基于C语言的PID算法,由于网络中很少有人进行分享完整的PID算法实 ...
- 【系列】关于NJUPT电赛自控方向第一次积分赛的总结
本人是NJUPT电子科学与技术专业大一摸鱼狗一枚.本博客旨在总结与分享个人准备电赛所学知识,同时也是为了防止遗忘,锻炼写文章的能力.目前电赛方向为自控方向.主要研究方向为单片机.图像处理.自动控制相关 ...
- 线性控制原理——PID算法应用
使用控制系统(PID)控制被控对象 PID控制的三要素:控制器,被控对象,反馈器.控制器就是一个数学模型,就PID来说,等同于PID算法.是对反馈量的一个处理与输出.通俗的说就是对于每个被控的量,我的 ...
- 位置式PID与增量式PID算法
位置式PID与增量式PID算法 PID控制是一个二阶线性控制器 定义:通过调整比例.积分和微分三项参数,使得大多数的工业控制系统获得良好的闭环控制性能. 优点 ...
- PID算法笔记2
总所周知,PID算法是个很经典的东西.而做自平衡小车,飞行器PID是一个必须翻过的坎.因此本节我们来好好讲解一下PID,根据我在学习中的体会,力求通俗易懂.并举出PID的形象例子来帮助理解PID.一. ...
随机推荐
- 【OGF生成函数板子题】牛客编程巅峰赛S2第11场 C 挑选方案问题
upd 2022-01-26 我找到了个题集 牛客竞赛数学专题班生成函数I(线性递推关系.生成函数概念与公式推导.暴力计算) 目录 题目链接 题面 解题思路 AC代码 题目链接 https://ac. ...
- 自己动手从零写桌面操作系统GrapeOS系列教程——18.外设和IO
学习操作系统原理最好的方法是自己写一个简单的操作系统. 一.外设和I/O接口 前面我们介绍过冯·诺依曼结构包含5部分,其中输入设备和输出设备统称为外部设备,简称外设.常见的外设有鼠标.键盘.显示器.硬 ...
- 股票数据Scrapy爬虫实例(亲测有效)
步骤: 步骤1:建立工程和Spider模板 scrapy startproject BaiduStocks cd BaiduStocks scrapy genspider stocks baidu.c ...
- 数仓如何进行表级控制analyze?
摘要: 介绍如何设置采样大小和表级控制analyze. 本文分享自华为云社区<GaussDB(DWS) 如何表级控制analyze>,作者:leapdb. 一.控制采样大小 [设置全局采样 ...
- 从k8s 的声明式API 到 GPT的 提示语
命令式 命令式有时也称为指令式,命令式的场景下,计算机只会机械的完成指定的命令操作,执行的结果就取决于执行的命令是否正确.GPT 之前的人工智能就是这种典型的命令式,通过不断的炼丹,告诉计算机要怎么做 ...
- ASP.NET Core如何知道一个请求执行了哪些中间件?
第一步,添加Nuget包引用 需要添加两个Nuget包分别是:Microsoft.AspNetCore.MiddlewareAnalysis和Microsoft.Extensions.Diagnost ...
- 活字格性能优化技巧(3):如何巧用CDN提升含页面的访问速度
本文由葡萄城技术团队于博客园原创并首发转载请注明出处:葡萄城官网,葡萄城为开发者提供专业的开发工具.解决方案和服务,赋能开发者. 上两篇中我们分享了如何利用数据库主键和表格设置默认不加载数据来提升应用 ...
- 数据泵:oracle数据泵导入导出部分用户
问题描述:需要将140服务器中的tbomnew实例下的部分用户导入到118服务器下的tbompx实例中,本次导入导出的两个数据库均为19C 部分用户名:CORE,MSTDATA,BOMMGMT,CFG ...
- 如何根据需求选择合适的数据库管理工具?Navicat OR DBeaver
1.写在前面 在阅读本文之前,糖糖给大家准备了Navicat和DBeaver安装包,在公众号内回复"Navicat"或"DBeaver"或"数据库管理 ...
- vue中实际代码模拟JS中promise调接口的运行流程
假设我们有一个需要调用接口的场景,我们可以使用Vue中的axios库来发送请求.以下是一个简单的例子: // 引入axios库import axios from 'axios' // 定义一个函数,用 ...