OpenCV 之 自定义滤波
图像处理中,"空间域" 指的是图像平面,因此,空间滤波 可定义为:在图像平面内对像素灰度值进行的滤波
1 空间滤波
1.1 滤波过程
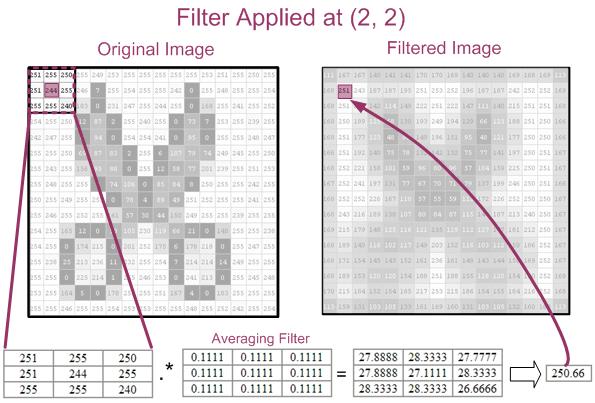
如图,Filter 是一个 3x3 滤波核,当它从图像的左上角开始,逐个像素沿水平方向扫描,最后到右下角时,便会产生滤波后的图像

假设输入图像 $f(x, y)$,滤波后的图像为 $g(x, y)$,则其中 $g(2,2)$ 和 $g(4,4)$ 的计算过程如下:
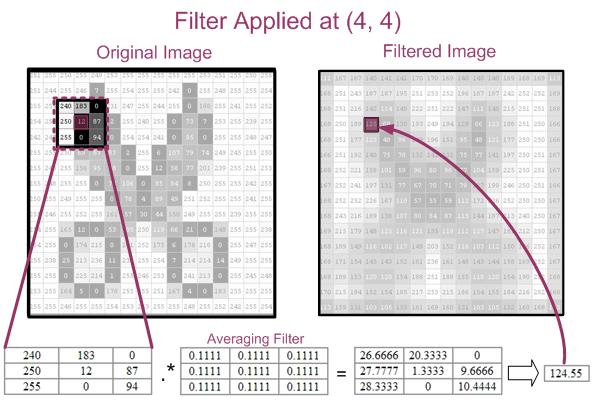
上图中,以像素 (4,4) 为中心的 3x3 邻域,和滤波核的向量点乘之积,即为 g(4,4)
g(4,4) = 240*0.1111 + 183*0.1111 + 0*0.1111 + 250*0.1111 + 12*0.1111 + 87*0.1111 + 255*0.1111 + 1*0.1111 + 94*0.1111
= 26.6666 + 20.3333 + 0 + 27.7777 + 1.3333 + 9.6666 + 28.3333 + 0 + 10.4444
= 124.55
1.2 相关和卷积
空间滤波中,相关和卷积,是容易混淆的概念,定义如下:
- 相关 (Correlation),和上述的滤波过程一样,即 滤波核 逐行扫描图像,并计算 每个位置像素点积 的过程
- 卷积 (Convolution),和 "相关" 过程类似,但 滤波核 要 先旋转 180°,然后再执行和 “相关” 一样的操作
(二维中的旋转 180°,等于滤波核沿一个坐标轴翻转,然后再沿另一个坐标轴翻转)

注意:如果滤波核是对称的,则对图像进行相关和卷积的结果是一致的
2 OpenCV 函数
2.1 filter2D 函数
在 OpenCV 中,可自定义滤波核,然后通过 filter2D() 来完成图像滤波
void filter2D(
InputArray src, // 输入图像
OutputArray dst, // 输出图像(大小和通道数,同 src)
int ddepth, // 输出图像的 depth
InputArray kernel, // 滤波核,准确地说,是相关核
Point anchor = Point(-1,-1), // 锚点位置,滤波核尺寸为奇数时,不用指定,一般取默认值 Point(-1,-1);滤波核尺寸为偶数时,需指定锚点位置
double delta = 0, // optional value added to the filtered pixels before storing them in dst
int borderType = BORDER_DEFAULT // 边界处理方法
);
filter2D() 求的是 相关,并非 卷积,只有当滤波核对称时,filte2D() 才可视为卷积运算,其公式如下:
$\quad dst(x, y) = \sum \limits_{0 \leq x' <kernel.cols, \\ 0 \leq y'<kernel.rows} \: kernel(x', y') * src(x+x'-anchor.x, \; y+y'-anchor.y) $
假定滤波核 kernel 大小为 3x3,以一个像素点 src(4,4) 为例,则有:
dst(4,4) = kernel(0,0)*src(4+0-1, 4+0-1) + kernel(0,1)*src(4+0-1, 4+1-1) + kernel(0,2)*src(4+0-1, 4+2-1)
+ kernel(1,0)*src(4+1-1, 4+0-1) + kernel(1,1)*src(4+1-1, 4+1-1) + kernel(1,2)*src(4+1-1, 4+2-1)
+ kernel(2,0)*src(4+2-1, 4+0-1) + kernel(2,1)*src(4+2-1, 4+1-1) + kernel(2,2)*src(4+2-1, 4+2-1)
滤波核与输入图像的卷积点乘,对应关系如下:

2.2 flip 函数
当滤波核不对称时,要得到真正的卷积运算,还需 flip() 函数来完成 kernel 的二维翻转
void flip(
InputArray src, // input array
OutputArray dst, // output array
int flipCode // 0, flip around x-axis; positive value, flip around y-axis; negative value, flip around both axes.
);
如果滤波核的大小为奇数,则 filter2D() 中的锚点位置可设为 Point(-1,-1),此时,默认滤波核的中心为锚点;如果滤波核的大小为偶数,则需要自定义锚点位置
OpenCV 中锚点位置的实现函数 normalizeAnchor() 如下:
static inline Point normalizeAnchor(Point anchor, Size ksize)
{
if (anchor.x == -1)
anchor.x = ksize.width / 2;
if (anchor.y == -1)
anchor.y = ksize.height / 2;
CV_Assert(anchor.inside(Rect(0, 0, ksize.width, ksize.height)));
return anchor;
}
3 代码示例
3.1 偏导数
自定义滤波核,利用 filter2D() 函数,实现图像的一阶和二阶偏导运算
1) 一阶偏导
图像在 x 和 y 方向的一阶偏导如下:
$\quad \frac {\partial f}{\partial x} = f(x+1,y) - f(x,y)$
$\quad \frac {\partial f}{\partial y} = f(x, y+1) - f(x, y)$
对应滤波核为 $K_{x} = \begin{bmatrix} -1 & 1 \end{bmatrix} $,$K_{y} = \begin{bmatrix} -1 \\ 1 \end{bmatrix} $
2) 二阶偏导
同样,在 x 和 y 方向的二阶偏导如下:
$\quad \frac {\partial f^2} {\partial x^2} = f(x+1, y) + f(x-1, y)- 2f(x,y)$
$\quad \frac {\partial f^2}{\partial y^2} = f(x, y+1) + f(x, y-1)- 2f(x,y)$
$\quad \frac {\partial f^2}{\partial x \partial y} = f(x+1, y+1) - f(x+1, y) - f(x, y+1)+ f(x,y)$
对应滤波核为 $K_{xx} = \begin{bmatrix} 1 & -2 & 1 \end{bmatrix} $,$K_{yy} = \begin{bmatrix} 1 \\ -2 \\ 1 \end{bmatrix} $,$K_{xy} = \begin{bmatrix} 1 & -1 \\ -1 & 1 \end{bmatrix} $
3.2 代码示例
#include "opencv2/imgproc.hpp"
#include "opencv2/highgui.hpp" using namespace cv; int main()
{
// 读取图像
Mat src = imread("fangtze.jpg", IMREAD_GRAYSCALE);
if (src.empty()) {
return -1;
} Mat kx = (Mat_<float>(1, 2) << -1, 1); // 1行2列的 dx 滤波核
Mat ky = (Mat_<float>(2, 1) << -1, 1); // 2行1列的 dy 滤波核 Mat kxx = (Mat_<float>(1, 3) << 1, -2, 1); // 1行3列的 dxx 滤波核
Mat kyy = (Mat_<float>(3, 1) << 1, -2, 1); // 3行1列的 dyy 滤波核
Mat kxy = (Mat_<float>(2, 2) << 1, -1, -1, 1); // 2行2列的 dxy 滤波核 // 一阶偏导
Mat dx, dy;
filter2D(src, dx, CV_32FC1, kx);
filter2D(src, dy, CV_32FC1, ky); // 二阶偏导
Mat dxx, dyy, dxy;
filter2D(src, dxx, CV_32FC1, kxx);
filter2D(src, dyy, CV_32FC1, kyy);
filter2D(src, dxy, CV_32FC1, kxy); // 显示图像
imshow("dx", dx); waitKey();
}
输出的偏导图像如下,第一行从左到右:原图 - dx - dy;第二行从左至右:dxy - dxx -dyy




参考资料
OpenCV Tutorials / imgproc module / Making your own linear filters
Gonzalez,《Digital Image Processing》4th ch3 Intesity Transformations and Spatial Filtering
CS425 Lab: Intensity Transformations and Spatial Filtering
OpenCV 之 自定义滤波的更多相关文章
- opencv:自定义滤波
卷积核的定义 均值卷积核 // 自定义滤波 - 均值卷积 int k = 15; Mat mkernel = Mat::ones(k, k, CV_32F) / (float)(k * k); Mat ...
- 使用opencv实现自定义卷积
对图像进行卷积是图像处理的基本操作,最近在研究图像滤波,经常要用到自定义卷积,所以实现了一下 #include "opencv2/imgproc/imgproc.hpp" #inc ...
- PIE SDK自定义滤波
1.算法功能简介 自定义滤波可以自由设置滤波模板,对数据进行处理,自定义滤波器的一般规则要求: ( 1) 滤波器的大小应该是奇数,这样它才有一个中心,例如 3x3, 5x5 或者 7x7.有中心了,也 ...
- 目标跟踪之粒子滤波---Opencv实现粒子滤波算法
目标跟踪学习笔记_2(particle filter初探1) 目标跟踪学习笔记_3(particle filter初探2) 前面2篇博客已经提到当粒子数增加时会内存报错,后面又仔细查了下程序,是代码方 ...
- opencv的频域滤波
下面是频域滤波示例程序: 在本程序中,共有五个自定义函数,分别是: 1. myMagnitude(),在该函数中封装了Opencv中的magnitude函数,实现对于复数图像的幅值计算. 2. dft ...
- CUDA加opencv复现导向滤波算法
CUDA是GPU通用计算的一种,其中现在大热的深度学习底层GPU计算差不多都选择的CUDA,在这我们先简单了解下其中的一些概念,为了好理解,我们先用DX11里的Compute shader来和CUDA ...
- opencv中的滤波
以前的时候,为了过滤图像中的一些噪点,学过一些简单的滤波,比如中值滤波,均值滤波,也是自己实现的. 在opencv中有现成的函数可以调用,实现滤波的操作. 函数的原型如下: CVAPI(void) c ...
- 【OpenCV】邻域滤波:方框、高斯、中值、双边滤波
原文:http://blog.csdn.net/xiaowei_cqu/article/details/7785365 邻域滤波(卷积) 邻域算子值利用给定像素周围像素的值决定此像素的最终输出.如 ...
- opencv之图像滤波
均值滤波 均值滤波函数cv2.blur() import cv2 img = cv2.imread('01.jpg') blur = cv2.blur(img,(5,5)) cv2.imshow(&q ...
随机推荐
- javax.naming.NoInitialContextException:Need to specify class name in environment or system property, or as an applet parameter, or in an application resource file: java.naming.factory.initial
小弟初次用JNDI,使用数据源连接数据库,配置完相关的xml文件后,激动的我赶紧测试了一下,结果悲剧了,报出了错误: javax.naming.NoInitialContextException:Ne ...
- Leetcode No.88 Merge Sorted Array(c++实现)
1. 题目 1.1 英文题目 You are given two integer arrays nums1 and nums2, sorted in non-decreasing order, and ...
- DEV C++5.11编译没有结果提示
点击"视图"菜单--选择"浮动报告 窗口"
- JPA用法中字段起名规范
前两天在学习Springboot使用JPA 来操作数据库时,碰到一个问题,最终发现了JPA写法中表字段名称要写规范. 记录下来提醒自己. CityEntity是一个City的实体类. 1 @Table ...
- js浮点数保留位数方法封装
大家在平时业务中应该经常跟小数打交道吧,有没有被小数点的保留位数问题搞得头疼啊.比如,保留一位小数,保留俩位小数,保留三位小数,向上取整.四舍五入等等. 而我最近在项目中正好遇到类似的问题:有的地方要 ...
- 【LeetCode】496.下一个更大元素I
496.下一个更大元素I 知识点:栈:HashMap: 题目描述 给你两个 没有重复元素 的数组 nums1 和 nums2 ,其中nums1 是 nums2 的子集. 请你找出 nums1 中每个元 ...
- Python+Requests+Xpath实现动态参数获取实战
1.古诗文网直接登录时,用浏览器F12抓取登录接口的入参,我们可以看到框起来的key对应的value是动态参数生成的,需获取到: 2.登录接口入参的值一般是登录接口返回的原数据值,若刷新后接口与对应源 ...
- Unittest方法 -- 测试报告&加载测试类(discover)
import unittestimport HTMLTestRunnerimport osclass F11(unittest.TestCase): def test_001(self): self. ...
- 如何修改product.product的display_name的显示,解决_rec_name失效的问题
回顾学习 之前有讲解过display_name是怎么由来的,odoo会去取_rec_name的值,会将_rec_name的值赋值给display_name. class FandxProduct(mo ...
- Docker安装和常用配置【Linux】
Linux下安装配置docker 安装指南:https://developer.aliyun.com/article/110806 一.配置国内镜像源 1.1 设置国内阿里巴巴下载源 [root@lo ...