Apollo与ROS
Apollo项目基于ROS,但是对其进行了改造,主要包括下面三个方面:
- 通信性能优化
- 去中心化网络拓扑
- 数据兼容性扩展
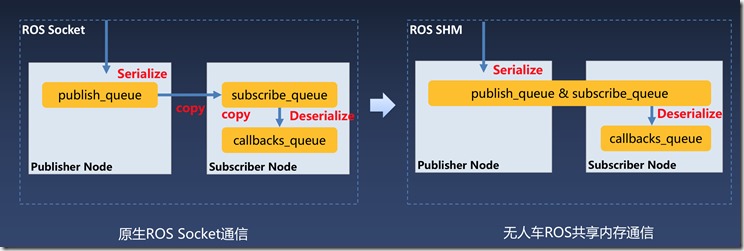
通信性能优化
自动驾驶车辆中包含了大量的传感器,这些传感器可能以非常高频的速度产生数据,所以整个系统对于数据传输效率要求很高。在ROS系统中,从数据的发布到订阅节点之间需要进行数据的拷贝。
在数据量很大的情况下,很显然这会影响数据的传输效率。所以Apollo项目对于ROS第一个改造就是将通过共享内存来减少数据拷贝,以提升通信性能。如下图所示:
去中心化网络拓扑
前文我们提到,ROS系统中包含了一个通信的主节点,所有其他节点都要借助于这个节点来进行通信。所以,很显然的,假如这个节点发生了通信故障,就会影响整个系统的通信。并且,整个结构还缺乏异常恢复机制。
所以Apollo项目对于ROS的第二个改造就是去除这种中心化的网络结构。Apollo使用RTPS(Real-Time Publish-Subscribe)服务发现协议实现完全的P2P网络拓扑。
关于RTPS详见这里:Real-Time Publish-Subscribe
数据兼容性扩展
Apollo项目对于ROS最后一个较大的改进就是对于数据格式的调整。
在ROS系统中,使用msg描述文件定义模块间的消息接口。但不幸的是,接口升级之后不同的版本的模块难以兼容。
因此,Apollo选择了Google的Protocol Buffers格式数据来解决这个问题。
Protocol Buffers,是Google公司开发的一种数据描述语言,类似于XML能够将结构化数据序列化,可用于数据存储、通信协议等方面。它不依赖于语言和平台并且可扩展性极强。现阶段官方支持C++、JAVA、Python三种编程语言,但可以找到大量的几乎涵盖所有语言的第三方拓展包。
Apollo与ROS的更多相关文章
- [转]自动驾驶平台Apollo 2.5环境搭建
原文地址:https://blog.csdn.net/jinzhuojun/article/details/80210180,转载主要方便随时查阅,如有版权要求,请及时联系. 我们知道,自动驾驶在学界 ...
- Apollo框架试玩
2017年7月5日,百度举行了AI开发者大会,在会上发布了Apollo项目,并进行了演示,该项目在Github上已经能够被访问.出于一个程序员的好奇,昨天试玩了一把,确实不错. http://apol ...
- IMU(LPMS-B2) ROS下使用教程
一.基本信息 http://www.alubi.cn/lpms-b2/ 安装ros教程 http://wiki.ros.org/lpms_imu https://lp-research.com/ros ...
- Apollo 框架的剖析1
百度Apollo 自动驾驶开源模块分析 从今天开始研究学习apollo的源码,apollo 3.0源码. apollo 3.0的系统框图 文件目录简介 apollo根目录 ├── .github/IS ...
- 百度Apollo搭建步骤(待更新)
百度Apollo搭建步骤 ##一.安装ubuntu16.04 无需多说,安装完成打开命令行. ##二.下载Apollo镜像 git clone https://github.com/ApolloAut ...
- Apollo GPS调试笔记
前言:在Apollo美研团队的支持下,最近完成了Apollo推荐的Novatel PP7与我们的基站调试,在这里对Apollo的笔记做一个补充,希望以后的开发者不用在踩我们踩过的坑. 在自己调导航(h ...
- 百度Apollo解析——3.common
1.略读 该目录下主要提供了各个模块公用的函数和class以及一些数学API还有公共的宏定义. 在Apollo 1.0中,common是整个框架的基础.configs是配置文件加载.adapters是 ...
- Apollo——安装
1.安装原版ubuntu 14.04http://www.ubuntu.org.cn/download/alternative-downloads 2.安装对应ubuntu 14.04的indigo版 ...
- Apollo自动驾驶框架试玩
2017年7月5日,百度举行了AI开发者大会,在会上发布了Apollo项目,并进行了演示,该项目在Github上已经能够被访问.出于一个程序员的好奇,昨天试玩了一把,确实不错. http://apol ...
随机推荐
- LR IP欺骗
一.设置IP欺骗的原因: 1.当某个IP的访问过于频繁,或者访问量过大是,服务器会拒绝访问请求,这时候通过IP欺骗可以增加访问频率和访问量,以达压力测试的效果 2.某些服务器配置了负载均衡,使用同一个 ...
- python总结 + 部署简单项目 到生产
-> filter过滤:list(filter(lambda x: x[0].find('tmp') == -1, table_temp_r)) -> 自定义map:def map_for ...
- flutter获取状态栏高度
import 'dart:ui'; MediaQueryData.fromWindow(window).padding.top 系统默认的appBar等高度 位于Dart Packages/flutt ...
- 深入理解SpringIOC容器
转载来源:[https://www.cnblogs.com/fingerboy/p/5425813.html] 前言: 在逛博客园的时候突然发现一篇关于事务的好文章,说起spring事物就离不开AOP ...
- Salesforce Bulk API 基于.Net平台下的实施
在最近的salesforce实施项目中应用到Bulk API来做数据接口.顺便把实际应用的例子写下来.希望对做salesforce接口的朋友有借鉴作用. 一 参考网络牛人写好的Demo. 下载地址:h ...
- Helicute FPV App Privacy Policy
Personal Data collected for the following purposes and using the following services: Device permissi ...
- KEIL之工程单独文件属性修改
@2019-04-29 [小记] 可以设置文件是否参与编译.内存分配.宏定义等属性设置
- [openssh-server]install and enable ssh in debian9 / 在debian9上安装并启用ssh
新安装的debian9.8 with XFCE 发现没有ssh,下载debian-9.8.0-amd64-DVD-1.iso并挂在到ESXi虚拟机/media/cdrom0. 清空或保存/etc/ap ...
- 20165223《信息安全系统设计基础》第九周学习总结 & 第八周课上测试
目录 [第九周学习总结] 教材内容总结 [第八周课上测试] (一)求命令行传入整数参数的和 (二)练习Y86-64模拟器汇编 (三)基于socket实现daytime(13)服务器和客户端 参考资料 ...
- redisson整合spring
转: redisson整合spring 转: 原文:http://blog.csdn.net/wang_keng/article/details/73549274 首先讲下什么是Redisson:Re ...