IMU(LPMS-B2) ROS下使用教程
一、基本信息
http://www.alubi.cn/lpms-b2/
安装ros教程
http://wiki.ros.org/lpms_imu
https://lp-research.com/ros-and-lp-research-imus-simple/
二、使用方法
在system setting中打开蓝牙,连接IMU。
rosrun rqt_plot rqt_plot &
rosrun lpms_imu lpms_imu_node _sensor_model:="LPMSB2-9BA395" _port:="00:04:3E:9B:A3:95"
若不知道_sensor_model和_port两个参数,则需要在windows下安装openMAT,蓝牙连接IMU后,即可读取这两个参数值。
在rqt_plot中输入要查看的topic名称,即可查看。
三、IMU滤波操作
http://wiki.ros.org/imu_complementary_filter
四、 使用Allan标定法标定IMU随机误差
IMU的随机误差包括加速度计和陀螺仪的高斯白噪声和bias
该开源工具包利用Allan曲线,根据输入的IMU读数,输出IMU的高斯白噪声和角度随机游走。
https://github.com/gaowenliang/imu_utils
https://github.com/rpng/kalibr_allan
注意:Allan曲线标定的结果是连续随机误差,需要进一步转换为离散随机误差.因为使用过程中一直读取IMU的离散读数.
如何理解Allan曲线请参看
https://github.com/XinLiGH/GyroAllan
五、IMU的测量模型
加速度计的测量模型
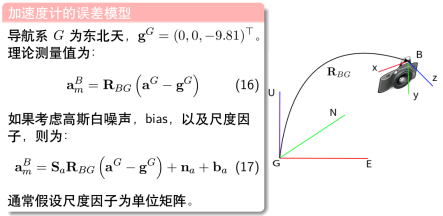
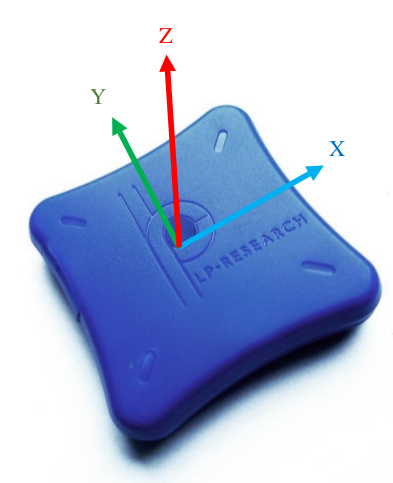
IMU有东北天坐标系(ENU)和北东地(NED)两种坐标系设置。
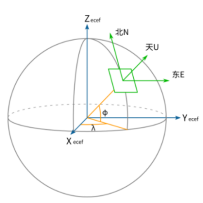
以东北天坐标系为例,惯性系下重力加速度读数 g = (0, 0, -9.81)T.
静止时,
a = 0; am = -g
自由落体运动,
a = g; am = 0
五、IMU和lidar联合标定
1)直接联合标定
阿波罗:https://github.com/ApolloAuto/apollo/blob/master/docs/specs/apollo_lidar_imu_calibration_guide.md
苏黎世理工:https://github.com/ethz-asl/lidar_align
2)相机和lidar联合标定,相机和IMU联合标定,通过链式计算获取lidar和IMU外参
IMU(LPMS-B2) ROS下使用教程的更多相关文章
- LSD-SLAM深入学习(1)-基本介绍与ros下的安装
前言 借鉴来自RGB-D数据处理的两种方法-基于特征与基于整体的,同样可以考虑整个图片的匹配,而不是只考虑特征点的…… 一般这种稠密的方法需要很大的计算量,DTAM: Dense tracking a ...
- ros下多机器人系统(1)
multi-robot system 经过两个多月的ros学习,对ros的认识有了比较深入的了解,本篇博客主要记录在ros下开发多机器人系统以及对ros更深入的开发.本篇博客是假定读者已经学习完了全部 ...
- ZED 相机 && ORB-SLAM2安装环境配置与ROS下的调试
注:1. 对某些地方进行了更新(红色标注),以方便进行配置. 2. ZED ROS Wrapper官方github已经更新,根据描述新的Wrapper可能已经不适用与Ros Indigo了,如果大家想 ...
- pl-svo在ROS下运行笔记
一.程序更改的思路(参考svo_ros的做法): 1.在ROS下将pl-svo链接成库需要更改相应的CMakeLists.txt文件,添加package.xml文件: 2.注册一个ROS节点使用svo ...
- ORB-SLAM2(2) ROS下配置和编译
1配置USB相机 1.1网友参考: http://www.liuxiao.org/2016/07/ubuntu-orb-slam2-%E5%9C%A8-ros-%E4%B8%8A%E7%BC%96%E ...
- ros下基于百度语音的,语音识别和语音合成
代码地址如下:http://www.demodashi.com/demo/13153.html 概述: 本demo是ros下基于百度语音的,语音识别和语音合成,能够实现文字转语音,语音转文字的功能. ...
- ROS下使用ASUS Xtion Pro Live
一.ROS官网hydro版本OpenNI安装 3. Installation 3.1 Ubuntu installation To install only openni_camera: sudo a ...
- ROS机器人程序设计(原书第2版)补充资料 (肆) 第四章 在ROS下使用传感器和执行器
ROS机器人程序设计(原书第2版)补充资料 (肆) 第四章 在ROS使用传感器和执行器 书中,大部分出现hydro的地方,直接替换为indigo或jade或kinetic,即可在对应版本中使用. 第四 ...
- SVO在ROS下的配置与运行
最近在做实验的时候,需要配置SVO,下面讲讲其中的过程以及遇到的问题: 首先说明配置环境:Ubuntu 14.04 + ROS indigo,ROS的安装我参考了ROS的官网上给出的教程:http:/ ...
随机推荐
- ng2 配置端口号
ng2 默认端口号4200 若要配置,用两种方法 (1)可以使用以下命令 ng server --port 4201 (2)找到node_modules/angular-cli/lib/confi ...
- Tmux会话-基本操作及原理
一.Tmux命令介绍: Tmux (“Terminal Multiplexer”的简称), 是一款优秀的终端复用软件,类似 GNU screen,但比screen更出色. tmux来自于OpenBSD ...
- java 中根据类的属性排序
package edu.del; import java.util.ArrayList; import java.util.Collections; import java.util.List; im ...
- Python_文件处理
1.Python 文件处理 打开文件---->读取内容---->获得内容 读取文件方式: r 只读文件 w 只写模式 a 追加模式 r+b 读写模式 w+b 写读模式 a+b ...
- 暗影精灵2pro——使用一年多后电池鼓包,传说中的更新BIOS问题(惠普15ax-226tx)
17年春天的时候正好赶上自己在东北一所省会城市的211大学读硕毕业,为了更新下自己的装备,同时也是为了纪念在母校读书7年的经历,遂够了一款暗影精灵2pro,如上图右侧所示,是一款颜值较高的很轻薄的笔记 ...
- 【转载】tolua之wrap文件的原理与使用
什么是wrap文件 每个wrap文件都是对一个c#类的包装,在lua中,通过对wrap类中的函数调用,间接的对c#实例进行操作. wrap类文件生成和使用的总体流程 生成一个wrap文件的流程 这部分 ...
- python从零开始 -- 第1篇之环境搭建
事实上,网络上有很多相应的教程,本文无意做成文章的粘贴展示板,附上我认为的简易的安装详解: 安装 Python 环境(编程小白的第一本 Python 入门书),包含了python以及相关的IDE,图文 ...
- pycrypto安装各种方法试了,最后这种最快速最方便
需要安装vs,然后按照如下步骤 这个不是在cmd中执行 而是在vs的命令行中执行
- 在进行多次scanf时,printf输出错误
随便一处代码,经过改正后,输出正确的 ''' #include <stdio.h> int main(){ int T; scanf("%d",&T ...
- Elasticsearch2.3.4使用手册(使用存储过程做增量同步的探索)
一.工具安装 访问官网https://www.elastic.co/downloads/elasticsearch和http://xbib.org/repository/org/xbib/elasti ...