玩转X-CTR100 | STM32F4 l X-Assistant串口助手控制功能

我造轮子,你造车,创客一起造起来!塔克创新资讯【塔克社区 www.xtark.cn 】【塔克博客 www.cnblogs.com/xtark/ 】
X-CTR100控制器配套的X-Assistant串口调试助手的控制功能,实现与X-CTR100控制器的交互控制,控制LED灯的亮灭和舵机旋转角度。通过本教程可以学习上位机控制逻辑和串口通信协议相关知识。
原理
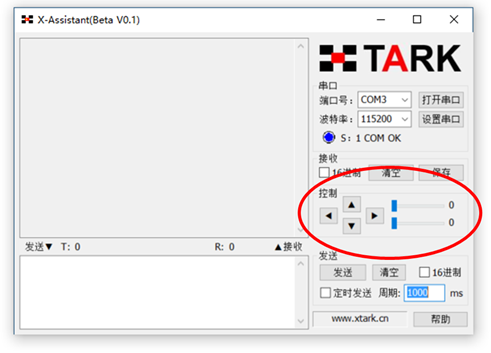
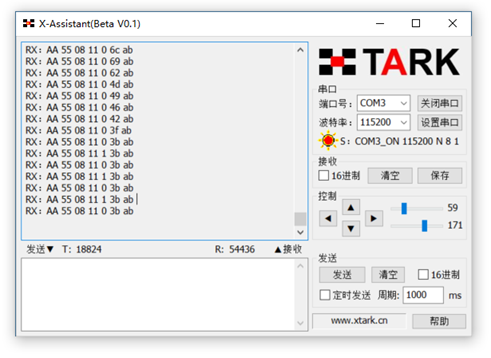
X-CTR100控制器配套X-Assistant串口调试助手软件。为方便PC与X-CTR100交互,增加控制功能,实现上下左右四个方向键和两个滑块交互,软件界面如下图所示。
控制协议如下所示,基于帧编码方式实现,具有帧头、帧校验内容。软件帮助也具有协议内容介绍。
- 协议内容:0xAA + 0x55 + 帧长度 + 帧编码 + 按键 + 滑块1 + 滑块2 + 校验和
- 帧长度:固定值 0x08
- 帧编码:固定值0x11
- 按键:无按键 - 0x00,上 - 0x01,下 - 0x02,左 - 0x04,右 - 0x08
- 滑块1:数值范围0~0xFF
- 滑块2:数值范围0~0xFF
- 校验和:前面7位数据累加和的低8位
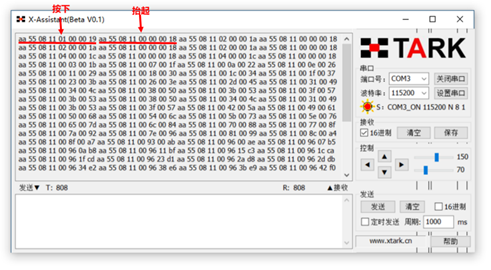
根据上述帧协议说明,列举帧范例:上按键 - 按下,滑块1 - 80,滑块2 - 80,帧数据"AA 55 11 01 50 50 B9"。帧协议可以通过将X-CTR100控制器的串口收发连接在一起进行测试,测试步骤如下。
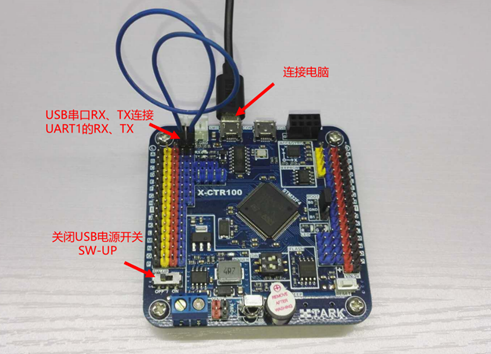
步骤一:将SW-UP调节到OFF侧,X-CTR100处理器无供电。通过杜邦线连接LA(UART1)接口的TX和RX。连接COM到调试电脑,此时CH340G USB转串口芯片通过电脑USB供电。
步骤二:打开X-Assistant软件,并打开对应串口,并设置接收显示为"16进制"。
步骤三:按下、抬起按钮观察数据变化,按下和抬起对应两个动作。滑动滑块观察帧数据,滑块滑动即可产生连续帧数据,实现实时的滑块位置反应。
X-Assistant的按钮控制可实现类似智能小车前进,后退,左转,右转控制,按钮按下执行相应的动作,按钮抬起小车停止。滑块控制可实现类似舵机控制,滑块滑动到什么位置,舵机指向什么位置,后面会说明通过滑块控制舵机示例。X-Assistant控制功能虽然简单,可以实现基本的机器人和智能小车控制,作品进行功能调试阶段比较方便。
例程
本例程实现X-Assistant软件控制功能对X-CTR100进行控制。上下按钮控制红绿LED灯,"上"按钮控制绿灯,"下"按钮控制红灯,按钮按下灯点亮,按钮抬起灯熄灭。滑块控制2个舵机转动。
硬件说明
硬件资源:
- 串口UART1
- 红绿LED灯
- 扩展接口RA、RB
- 小功率舵机,如SG90
硬件资源:
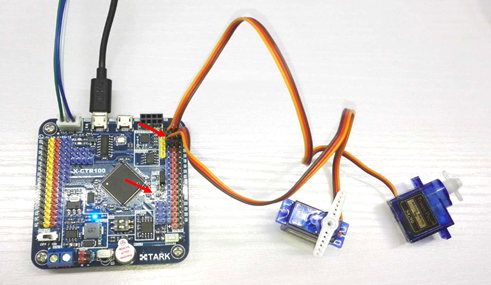
两个舵机分别连接在RA、RB两个接口上,使用TIM1的通道1和通道2进行舵机控制,注意舵机接插件正反,参考下图所示。
软件说明
本例程软件通过串口接收中断实现数据接收,并在中断中完成协议帧解析。中断程序通过flag标志向主程序传递解析结果,并打印接收到的帧数据。主程序根据解析结果,进行相应控制。
串口中断函数代码如下所示。
|
中断服务程序 void USART1_IRQHandler(void) { u8 Res;
if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET) //接收中断(接收到的数据必须是0x0d 0x0a结尾) {
Res =USART_ReceiveData(USART1);
if(USART1_RX_CON < 3) //接收帧头 + 长度 { if(USART1_RX_CON == 0) { if(Res == 0xAA) { USART1_RX_CON = 1; } else {
} }else if(USART1_RX_CON == 1) { if(Res == 0x55) { USART1_RX_CON = 2; } else { USART1_RX_CON = 0; } } else { USART1_RX_LEN = ( Res-1 ); USART1_RX_CON = 3; USART1_RX_CHECKSUM = 0xFF + Res; //0xFF 为 AA 55 校验和 } } else //接收数据 { if(USART1_RX_CON < USART1_RX_LEN) { USART1_RX_BUF[USART1_RX_CON] = Res; USART1_RX_CON++; USART1_RX_CHECKSUM = USART1_RX_CHECKSUM + Res; } 位 { if( Res == USART1_RX_CHECKSUM ) //校验正确 { //标记接收完成 flag = 1;
printf("RX:AA 55 08 %x %x %x %x \r\n", USART1_RX_BUF[3], USART1_RX_BUF[4], USART1_RX_BUF[5], USART1_RX_BUF[6]); } else //数据错误 { printf("AERR\r\n"); }
//接收完成,恢复初始状态 USART1_RX_CON = 0; USART1_RX_LEN = 0; } } USART_ITConfig(USART1, USART_IT_RXNE, ENABLE); } } |
主程序代码如下。
|
int main(void) { //X-CTR100初始化 AX_Init(115200); printf("***X-Assistant 控制功能例程***\r\n\r\n");
//舵机AB接口初始化 AX_SERVO_TIM2_AB_Init(); 度 度
//设置UART1接收中断 NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);//设置系统中断优先级分组2 NVIC_Config();
while (1) { if(flag) { //上按键控制绿灯,按下亮,抬起灭 if(USART1_RX_BUF[4] & 0x01) AX_LEDG_On(); else AX_LEDG_Off();
//下按键控制红灯,按下亮,抬起灭 if(USART1_RX_BUF[4] & 0x02) AX_LEDR_On(); else AX_LEDR_Off();
控制舵机,不连接舵机对程序无影响 AX_SERVO_TIM2_A_SetAngle(200 + USART1_RX_BUF[5]*5); //舵机A控制
控制舵机,不连接舵机对程序无影响 AX_SERVO_TIM2_B_SetAngle(200 + USART1_RX_BUF[6]*5); //舵机B控制
flag = 0; }
AX_Delayms(10); } } |
实现效果
上下按钮实现LED灯控制,拖动滑块进行舵机控制。解析的控制帧如下图所示。
玩转X-CTR100 | STM32F4 l X-Assistant串口助手控制功能的更多相关文章
- 玩转X-CTR100 | X-Assistant串口助手控制功能
更多塔克创新资讯欢迎登陆[塔克社区 www.xtark.cn ][塔克博客 www.cnblogs.com/xtark/ ] X-CTR100控制器配套的X-Assistant串口调试 ...
- 玩转X-CTR100 l STM32F4 l CAN通信
我造轮子,你造车,创客一起造起来!塔克创新资讯[塔克社区 www.xtark.cn ][塔克博客 www.cnblogs.com/xtark/ ] X-CTR100控制器STM32F4处理器内置CAN ...
- 玩转X-CTR100 l STM32F4 l ADC 模拟数字转换
我造轮子,你造车,创客一起造起来!塔克创新资讯[塔克社区 www.xtark.cn ][塔克博客 www.cnblogs.com/xtark/ ] 本文介绍X-CTR100控制器 AD转换接 ...
- 玩转X-CTR100 l STM32F4 l MPU6050加速度陀螺仪传感器
我造轮子,你造车,创客一起造起来!塔克创新资讯[塔克社区 www.xtark.cn ][塔克博客 www.cnblogs.com/xtark/ ] 本文介绍X-CTR100控制器 板载加速度 ...
- 玩转X-CTR100 l STM32F4 l DSP指令集性能测试
我造轮子,你造车,创客一起造起来!塔克创新资讯[塔克社区 www.xtark.cn ][塔克博客 www.cnblogs.com/xtark/ ] 本文介绍X-CTR100控制器 DSP库的 ...
- 玩转X-CTR100 l STM32F4 l FPU单精度浮点性能测试
我造轮子,你造车,创客一起造起来!塔克创新资讯[塔克社区 www.xtark.cn ][塔克博客 www.cnblogs.com/xtark/ ] 本文介绍X-CTR100控制器如何开启ST ...
- 玩转X-CTR100 l STM32F4 l RNG硬件随机数发生器
我造轮子,你造车,创客一起造起来!塔克创新资讯[塔克社区 www.xtark.cn ][塔克博客 www.cnblogs.com/xtark/ ] 本文介绍X-CTR100控制器 STM32F4硬件随 ...
- 玩转X-CTR100 l STM32F4 l X-CTR100与树莓派搭建机器人平台
我造轮子,你造车,创客一起造起来!塔克创新资讯[塔克社区 www.xtark.cn ][塔克博客 www.cnblogs.com/xtark/ ] 本文介绍X-CTR100控制器与树莓派Linux系统 ...
- 玩转X-CTR100 l STM32F4 l UCOS-III移植
我造轮子,你造车,创客一起造起来!塔克创新资讯[塔克社区 www.xtark.cn ][塔克博客 www.cnblogs.com/xtark/ ] 概述 前后台系统 简单的小型系统设计一般是基于前后台 ...
随机推荐
- 新C# 操作Excel属性
C# 操作Excel属性 数字(Range.NumberFormatlocal 属性) 常规:Range.NumberFormatlocal = "G/通用格式" 数值:Range ...
- 单细胞数据高级分析之初步降维和聚类 | Dimensionality reduction | Clustering
个人的一些碎碎念: 聚类,直觉就能想到kmeans聚类,另外还有一个hierarchical clustering,但是单细胞里面都用得不多,为什么?印象中只有一个scoring model是用kme ...
- exam_review to M1
1. 情态动词,尤其是can/can’t,should/shouldn’t. for example: You should have washed the wound.你应该已经洗好了伤口 Well ...
- 使用jquery.mobile和WebSQL实现记事本功能
1.记事本列表页 1.1.页面结构与样式: <div data-role="page" id="home"> <div data-role=& ...
- Tensorflow手写数字识别---MNIST
MNIST数据集:包含数字0-9的灰度图, 图片size为28x28.训练样本:55000,测试样本:10000,验证集:5000
- hihocoder 1513 小Hi的烦恼 (bitset优化)
大意: n个人, 5门课, 给定每个人每门课的排名, 对于每个人输出有多少人5门课都比他差. 明显是个5维偏序问题, 题目有保证排名均不同, 可以用bitset优化为$O(\frac{n^2}{\om ...
- CoordinatorLayout、AppBarLayout、CollapsingToolbarLayout的用法,让Toolbar与系统栏融为一体
CoordinatorLayout其实是加强版的FrameLayout布局,可以监听期所有子控件的各种事件,由Design Support库提供的,能体现Material Design 的魔力.能解决 ...
- 我的第一个C语言程序
从自学开始到现在应该有块一个月了,之前一直想要写博客一直没想好要自己建博客还是找平台来写.现在想想 其实都一样,不论在哪里,都可以记录自己学习的成长记录.这是我的第一篇关于C语言学习的博客,希望这只是 ...
- python-day97--django-ModelForm
Model Form :直接利用你的models里的字段 应用场景: - ModelForm - 中小型应用程序(model是你自己写的) - Form - 大型应用程序 注意事项: - 1. 类 f ...
- mysql 全文搜索(转载http://blog.csdn.net/manbujingxin/article/details/6656992)
前提:mysql只支持英文内容的全文索引,所以只考虑英文的全文搜索.假定数据表名为post,有三列:id.title.content.id是自增长序号,title是varchar,content是te ...