Opencv中使用Surf特征实现图像配准及对透视变换矩阵H的平移修正
图像配准需要将一张测试图片按照第二张基准图片的尺寸、角度等形态信息进行透视(仿射)变换匹配,本例通过Surf特征的定位和匹配实现图像配准。
配准流程:
- 1. 提取两幅图像的Surf特征
- 2. 对Surf特征进行匹配,找到最匹配的特征点对
- 3. 提取最优配对点的坐标,生成透视变换矩阵
- 4. 对测试图像经过透视变换,生成配准图像
以下是Opencv代码实现:
#include "highgui/highgui.hpp"
#include "opencv2/nonfree/nonfree.hpp"
#include "opencv2/legacy/legacy.hpp"
#include <iostream>
using namespace cv;
using namespace std;
int main(int argc,char *argv[])
{
Mat image01=imread(argv[1]);
Mat image02=imread(argv[2]);
imshow("原始测试图像",image01);
imshow("基准图像",image02);
//灰度图转换
Mat image1,image2;
cvtColor(image01,image1,CV_RGB2GRAY);
cvtColor(image02,image2,CV_RGB2GRAY);
//提取特征点
SurfFeatureDetector surfDetector(800); // 海塞矩阵阈值
vector<KeyPoint> keyPoint1,keyPoint2;
surfDetector.detect(image1,keyPoint1);
surfDetector.detect(image2,keyPoint2);
//特征点描述,为下边的特征点匹配做准备
SurfDescriptorExtractor SurfDescriptor;
Mat imageDesc1,imageDesc2;
SurfDescriptor.compute(image1,keyPoint1,imageDesc1);
SurfDescriptor.compute(image2,keyPoint2,imageDesc2);
//获得匹配特征点,并提取最优配对
FlannBasedMatcher matcher;
vector<DMatch> matchePoints;
matcher.match(imageDesc1,imageDesc2,matchePoints,Mat());
sort(matchePoints.begin(),matchePoints.end()); //特征点排序
//获取排在前N个的最优匹配特征点
vector<Point2f> imagePoints1,imagePoints2;
for(int i=0;i<10;i++)
{
imagePoints1.push_back(keyPoint1[matchePoints[i].queryIdx].pt);
imagePoints2.push_back(keyPoint2[matchePoints[i].trainIdx].pt);
}
//获取图像1到图像2的投影映射矩阵 尺寸为3*3
Mat homo=findHomography(imagePoints1,imagePoints2,CV_RANSAC);
////也可以使用getPerspectiveTransform方法获得透视变换矩阵,不过要求只能有4个点,效果稍差
//Mat homo=getPerspectiveTransform(imagePoints1,imagePoints2);
cout<<"变换矩阵为:\n"<<homo<<endl<<endl; //输出映射矩阵
//图像配准
Mat imageTransform1,imageTransform2;
warpPerspective(image01,imageTransform1,homo,Size(image02.cols,image02.rows));
imshow("经过透视矩阵变换后",imageTransform1);
waitKey();
return 0;
}测试图像:

配准基准(目标)图像:

配准效果:
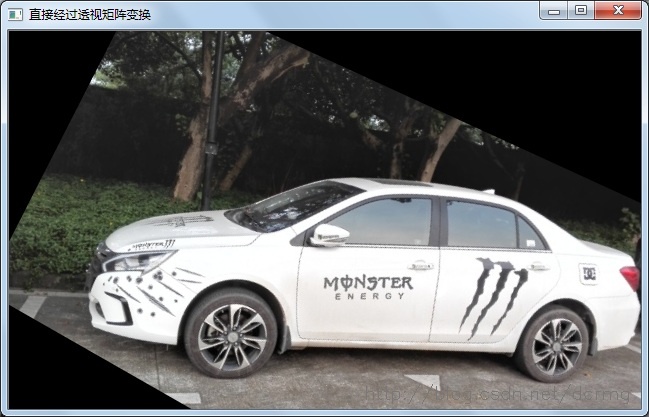
可以看到,使用Surf特征自动配准的效果还算可以,也不需要手动选取特征点,但是有点小遗憾是配准后原图的部分图像缺失了,如原始图像的左上角和左下角区域。
怎么解释这个现象呢?其实是因为原图像缺失部分经过透视矩阵变换后在新图像中位置坐标变成负的了,导致这部分直接被截取掉了。
拿原始图像中的坐标为左上角的点(x0,y0)=(1,1)为例,本例中生成的透视变换矩阵H为:

经过矩阵H变换后目标图像的对应坐标为X(x,y):
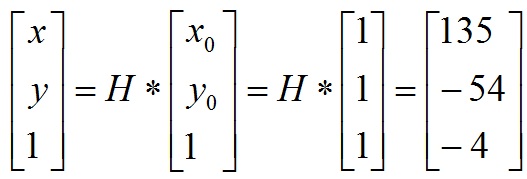
所以变换后的目标点X(x,y)=(135/-4,-54/-4)= (-34,13) ,即x的坐标等于-34,小于零,所以直接被截取干掉了。
解决办法之一可以通过修正变换矩阵,对其加一个水平或垂直方向上的平移分量,保证变换后的目标坐标有一个偏移,偏移后的坐标大于0即可。其中H矩阵的第一行数据影响水平(x)方向的偏移,第二行数据影响垂直(y)方向的偏移。所以水平偏移需要修正H矩阵的第一行数据,垂直偏移需要修正H矩阵的第二行数据。
H矩阵数值的调整可以通过用一个3*3的矩阵相乘实现,水平方向的修正矩阵:
Mat adjustMat=(Mat_<double>(3,3)<<1.0,0,adjustValue,0,1.0,0,0,0,1.0);
垂直方向上的修正矩阵:
Mat adjustMat=(Mat_<double>(3,3)<<1.0,0,0,0,1.0,adjustValue,0,0,1.0);
水平和垂直两个方向上的修正矩阵:
Mat adjustMat=(Mat_<double>(3,3)<<1.0,0,adjustValue1,0,1.0,adjustValue2,0,0,1.0);
上边的修正(平移)系数adjustValue数值越大,在目标图像上坐标的偏移也就越大,大于零的adjustValue对应正方向上的平移,小于零的adjustValue对应负方向的平移。
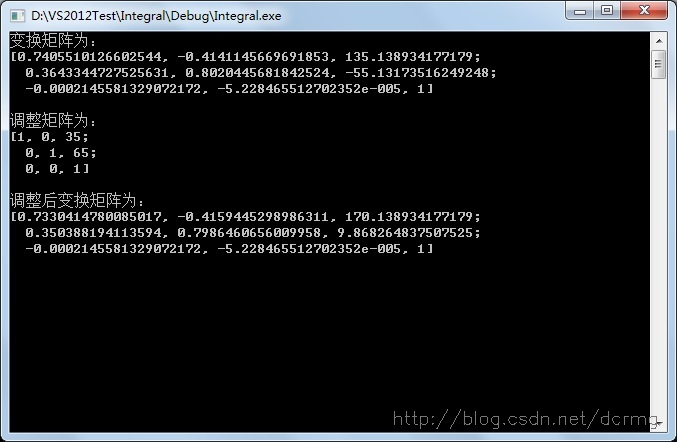
以下是经过adjustMat矩阵修正过的H矩阵数据变化对比:
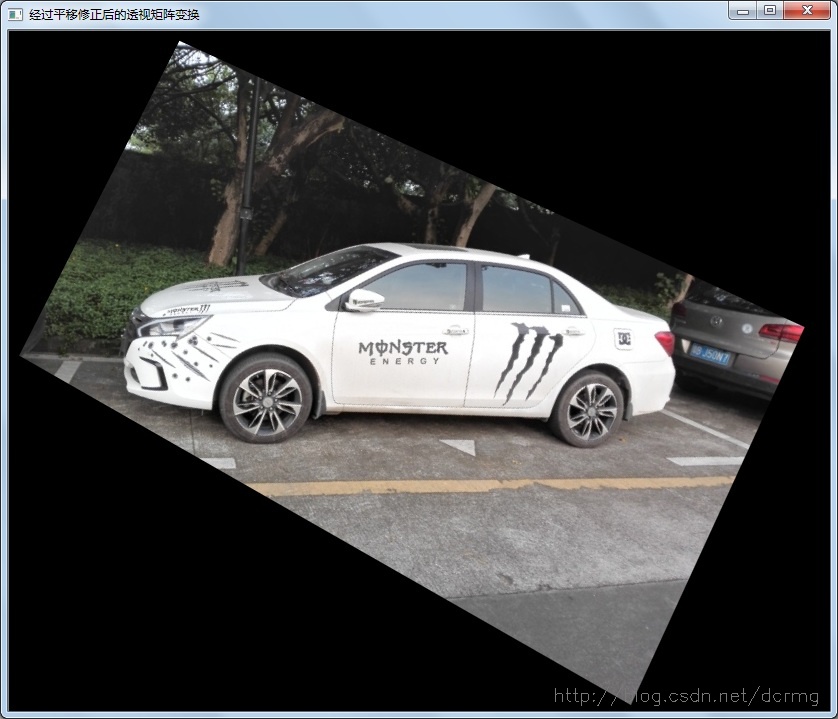
经过水平和垂直方向的平移修正之后的透视效果,两个角落区域的内容都可以显示出来了:
以下是对透视变换矩阵平移修正的完整代码,有兴趣可以参考试一试。
#include "highgui/highgui.hpp"
#include "opencv2/nonfree/nonfree.hpp"
#include "opencv2/legacy/legacy.hpp"
#include <iostream>
using namespace cv;
using namespace std;
int main(int argc,char *argv[])
{
Mat image01=imread(argv[1]);
Mat image02=imread(argv[2]);
imshow("原始测试图像",image01);
imshow("基准图像",image02);
//灰度图转换
Mat image1,image2;
cvtColor(image01,image1,CV_RGB2GRAY);
cvtColor(image02,image2,CV_RGB2GRAY);
//提取特征点
SurfFeatureDetector surfDetector(800); // 海塞矩阵阈值
vector<KeyPoint> keyPoint1,keyPoint2;
surfDetector.detect(image1,keyPoint1);
surfDetector.detect(image2,keyPoint2);
//特征点描述,为下边的特征点匹配做准备
SurfDescriptorExtractor SurfDescriptor;
Mat imageDesc1,imageDesc2;
SurfDescriptor.compute(image1,keyPoint1,imageDesc1);
SurfDescriptor.compute(image2,keyPoint2,imageDesc2);
//获得匹配特征点,并提取最优配对
FlannBasedMatcher matcher;
vector<DMatch> matchePoints;
matcher.match(imageDesc1,imageDesc2,matchePoints,Mat());
sort(matchePoints.begin(),matchePoints.end()); //特征点排序
//获取排在前N个的最优匹配特征点
vector<Point2f> imagePoints1,imagePoints2;
for(int i=0;i<10;i++)
{
imagePoints1.push_back(keyPoint1[matchePoints[i].queryIdx].pt);
imagePoints2.push_back(keyPoint2[matchePoints[i].trainIdx].pt);
}
//获取图像1到图像2的投影映射矩阵 尺寸为3*3
Mat homo=findHomography(imagePoints1,imagePoints2,CV_RANSAC);
////也可以使用getPerspectiveTransform方法获得透视变换矩阵,不过要求只能有4个点,效果稍差
//Mat homo=getPerspectiveTransform(imagePoints1,imagePoints2);
cout<<"变换矩阵为:\n"<<homo<<endl<<endl; //输出映射矩阵
double adjustValue=image1.cols;
Mat adjustMat=(Mat_<double>(3,3)<<1.0,0,35,0,1.0,65,0,0,1.0);
cout<<"调整矩阵为:\n"<<adjustMat<<endl<<endl;
cout<<"调整后变换矩阵为:\n"<<adjustMat*homo<<endl;
//图像配准
Mat imageTransform1,imageTransform2;
warpPerspective(image01,imageTransform1,homo,Size(image02.cols,image02.rows));
warpPerspective(image01,imageTransform2,adjustMat*homo,Size(image02.cols*1.3,image02.rows*1.8));
imshow("直接经过透视矩阵变换",imageTransform1);
imshow("经过平移修正后的透视矩阵变换",imageTransform2);
waitKey();
return 0;
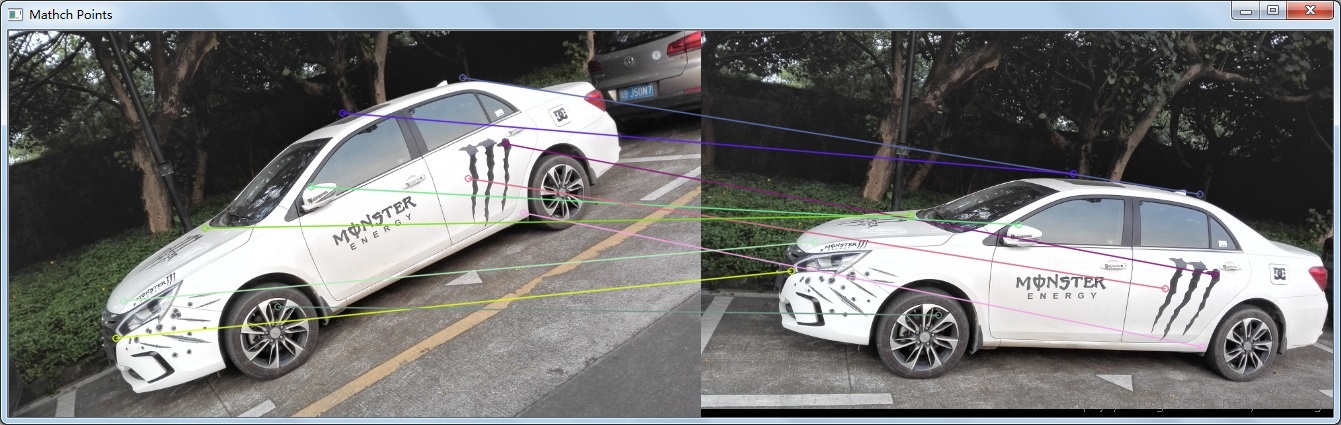
}顺便贴一下特征点的匹配效果:
Opencv中使用Surf特征实现图像配准及对透视变换矩阵H的平移修正的更多相关文章
- Opencv Sift和Surf特征实现图像无缝拼接生成全景图像
Sift和Surf算法实现两幅图像拼接的过程是一样的,主要分为4大部分: 1. 特征点提取和描述 2. 特征点配对,找到两幅图像中匹配点的位置 3. 通过配对点,生成变换矩阵,并对图像1应用变换矩阵生 ...
- 基于SURF特征的图像与视频拼接技术的研究和实现(一)
基于SURF特征的图像与视频拼接技术的研究和实现(一) 一直有计划研究实时图像拼接,但是直到最近拜读西电2013年张亚娟的<基于SURF特征的图像与视频拼接技术的研究和实现>,条 ...
- OpenCV中IplImage图像格式与BYTE图像数据的转换
最近在将Karlsruhe Institute of Technology的Andreas Geiger发表在ACCV2010上的Efficent Large-Scale Stereo Matchin ...
- OpenCV中的SURF算法介绍
SURF:speed up robust feature,翻译为快速鲁棒特征.首先就其中涉及到的特征点和描述符做一些简单的介绍: 特征点和描述符 特征点分为两类:狭义特征点和广义特征点.狭义特征点的位 ...
- 【OpenCV新手教程之十八】OpenCV仿射变换 & SURF特征点描写叙述合辑
本系列文章由@浅墨_毛星云 出品,转载请注明出处. 文章链接:http://blog.csdn.net/poem_qianmo/article/details/33320997 作者:毛星云(浅墨) ...
- OpenCV中基于Haar特征和级联分类器的人脸检测
使用机器学习的方法进行人脸检测的第一步需要训练人脸分类器,这是一个耗时耗力的过程,需要收集大量的正负样本,并且样本质量的好坏对结果影响巨大,如果样本没有处理好,再优秀的机器学习分类算法都是零. 今年3 ...
- OpenCV中基于HOG特征的行人检测
目前基于机器学习方法的行人检测的主流特征描述子之一是HOG(Histogram of Oriented Gradient, 方向梯度直方图).HOG特征是用于目标检测的特征描述子,它通过计算和统计图像 ...
- [OpenCV-Python] OpenCV 中图像特征提取与描述 部分 V (一)
部分 V图像特征提取与描述 OpenCV-Python 中文教程(搬运)目录 29 理解图像特征 目标本节我会试着帮你理解什么是图像特征,为什么图像特征很重要,为什么角点很重要等.29.1 解释 我相 ...
- OpenCV教程(47) sift特征和surf特征
在前面三篇教程中的几种角检测方法,比如harris角检测,都是旋转无关的,即使我们转动图像,依然能检测出角的位置,但是图像缩放后,harris角检测可能会失效,比如下面的图像,图像放大之前可 ...
随机推荐
- 1.2 Use Cases中 Website Activity Tracking官网剖析(博主推荐)
不多说,直接上干货! 一切来源于官网 http://kafka.apache.org/documentation/ Website Activity Tracking 网站活动追踪 The origi ...
- 深拷贝&浅拷贝
1.区别 浅拷贝:只拷贝了基本数据类型,引用数据类型只复制了引用,没有复制实体. 深拷贝:拷贝所有的层级属性 2.浅拷贝 (1) 直接赋值 拷贝之后,所有层级属性仍然公用了地址,会被影响 var a ...
- 本文介绍C# BitmapData
本文介绍C# BitmapData,对于C# BitmapData,虽然BitmapData.Width还是等于Bitmap.Width,但大概是出于显示性能的考虑. 最近要转开发平台,正研究C# ...
- 51Nod——N1082 与7无关的数
https://www.51nod.com/onlineJudge/questionCode.html#!problemId=1082 题目来源: 有道难题 基准时间限制:1 秒 空间限制:13107 ...
- 洛谷——U10206 Cx的治疗
https://www.luogu.org/problem/show?pid=U10206 题目背景 「Cx的故事」众所周知,Cx是一个宇宙大犇.由于Cx在空中花园失足摔下,导致他那蕴含着无穷智慧的大 ...
- POJ 1862 Stripies 贪心+优先队列
http://poj.org/problem?id=1862 题目大意: 有一种生物能两两合并,合并之前的重量分别为m1和m2,合并之后变为2*sqrt(m1*m2),现在给定n个这样的生物,求合并成 ...
- 微服务实战(六):选择微服务部署策略 - DockOne.io
原文:微服务实战(六):选择微服务部署策略 - DockOne.io [编者的话]这篇博客是用微服务建应用的第六篇,第一篇介绍了微服务架构模板,并且讨论了使用微服务的优缺点.随后的文章讨论了微服务不同 ...
- 全面解析Activity的生命周期
欢迎Follow我的GitHub, 关注我的CSDN. 在Android应用中, Activity是最重要的组件, 其生命周期(Lifecycle)被大家所熟知. 可是, 大家须要注意一些细节, 才干 ...
- swift开发多线程篇 - NSThread 线程相关简单说明(一些使用和注意点)
一 说明 本文涉及代码可以从https://github.com/HanGangAndHanMeimei/Code地址获得. 二 NSThread的基本使用和创建 1)基本用法(主线程|当前线程) 1 ...
- amazeui学习笔记--js插件(UI增强3)--折叠面板Collapse
amazeui学习笔记--js插件(UI增强3)--折叠面板Collapse 一.总结 注意点: 1.data-am-collapse:这个东西就是展开折叠事件 2.am-collapse(包括其下属 ...