[CC]Plugin-提取ISS3D关键点
基于CloudCompare开发的提取ISS3D关键点。
void qLxPluginPCL::doISS3D()
{
assert(m_app);
if (!m_app)
return; const ccHObject::Container& selectedEntities = m_app->getSelectedEntities();
size_t selNum = selectedEntities.size();
if (selNum!=)
{
m_app->dispToConsole("Select only one cloud!",ccMainAppInterface::ERR_CONSOLE_MESSAGE);
return;
} ccHObject* ent = selectedEntities[];
assert(ent);
if (!ent || !ent->isA(CC_TYPES::POINT_CLOUD))
{
m_app->dispToConsole("Select a real point cloud!",ccMainAppInterface::ERR_CONSOLE_MESSAGE);
return;
} ccPointCloud* m_cc_cloud = static_cast<ccPointCloud*>(ent); //input cloud
unsigned count = m_cc_cloud->size();
bool hasNorms = m_cc_cloud->hasNormals();
CCVector3 bbMin, bbMax;
m_cc_cloud->getBoundingBox(bbMin,bbMax);
const CCVector3d& globalShift = m_cc_cloud->getGlobalShift();
double globalScale = m_cc_cloud->getGlobalScale(); ccIss3Ddlg dlg;
if (!dlg.exec())
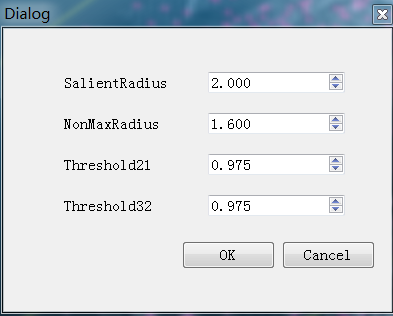
return; double s_SalientRadius=dlg.sbSalientRadius->value();
double s_NonMaxRadius =dlg.spNonMaxRadius->value();
double s_Threshold21 = dlg.spThreshold21->value();
double s_Threshold32 = dlg.spThreshold32->value(); pcl::PointCloud<PointXYZ>::Ptr pcl_cloud (new pcl::PointCloud<PointXYZ>);
try
{
unsigned pointCount = m_cc_cloud->size();
pcl_cloud->resize(pointCount); for (unsigned i = ; i < pointCount; ++i)
{
const CCVector3* P = m_cc_cloud->getPoint(i);
pcl_cloud->at(i).x = static_cast<float>(P->x);
pcl_cloud->at(i).y = static_cast<float>(P->y);
pcl_cloud->at(i).z = static_cast<float>(P->z);
}
}
catch(...)
{
//any error (memory, etc.)
pcl_cloud.reset();
} printf("读取了data点云数据:%d\n",pcl_cloud->size()); pcl::search::KdTree<pcl::PointXYZ>::Ptr tree (new pcl::search::KdTree<pcl::PointXYZ> ()); pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_out (new pcl::PointCloud<pcl::PointXYZ>); pcl::ISSKeypoint3D<pcl::PointXYZ,pcl::PointXYZ> iss_detector;
iss_detector.setSearchMethod (tree);
iss_detector.setSalientRadius(s_SalientRadius);
iss_detector.setNonMaxRadius(s_NonMaxRadius);
/*iss_detector.setSalientRadius(2.0f);
iss_detector.setNonMaxRadius(1.6f);*/
iss_detector.setInputCloud(pcl_cloud);
/*iss_detector.setThreshold21 (0.975);
iss_detector.setThreshold32 (0.975);*/
iss_detector.setThreshold21 (s_Threshold21);
iss_detector.setThreshold32 (s_Threshold32);
iss_detector.setMinNeighbors ();
iss_detector.setNumberOfThreads ();
cout<<"parameter set successful"<<endl;
iss_detector.compute(*cloud_out); int pointCount = cloud_out->size(); //static_cast<size_t>(sm_cloud ? sm_cloud->width * sm_cloud->height : 0); ccPointCloud* ccCloud =new ccPointCloud();
if (!ccCloud->reserve(static_cast<unsigned>(pointCount)))
return ;
for (size_t i = ; i < pointCount; ++i)
{
CCVector3 P(cloud_out->at(i).x,cloud_out->at(i).y,cloud_out->at(i).z);
ccCloud->addPoint(P);
}
ccCloud->setName(QString("ISS3D"));
ccColor::Rgb col = ccColor::Generator::Random();
ccCloud->setRGBColor(col);
ccCloud->showColors(true);
ccCloud->setPointSize();
ccHObject* group = ;
if (!group)
group = new ccHObject(QString("ISS3D").arg(ent->getName()));
group->addChild(ccCloud);
group->setVisible(true);
m_app->addToDB(group);
}
界面:
[CC]Plugin-提取ISS3D关键点的更多相关文章
- 从cocos2d-html5中提取出来的,用做前端开发的框架——cc.js
从cocos2d-html5中提取出来的,用做前端开发的框架——cc.js /************************************************************* ...
- (二)ORB描述子提取源码思路与实现
ORBSLAM2中ORB特征提取的特点 ORBSLAM2中通过对OpenCV中的ORB特征点提取类进行修改,对图像进行分块提取,而后划分节点,使得每个节点中保存的特征点性能是该节点所有特征点中最好的. ...
- (一)ORB描述子提取
ORBSLAM2中使用ORB描述子的方法 经典的视觉SLAM系统大体分为两种:其一是基于特征点法的,其二是基于直接法的.那么本文主要就讲特征点法的SLAM. 基于特征点法的视觉SLAM系统典型的有PT ...
- PCL关键点(1)
关键点也称为兴趣点,它是2D图像或是3D点云或者曲面模型上,可以通过定义检测标准来获取的具有稳定性,区别性的点集,从技术上来说,关键点的数量相比于原始点云或图像的数据量减小很多,与局部特征描述子结合在 ...
- 人脸识别之Python DLib库进行人脸关键点识别
一.首先安装DLib模块 这里只介绍linux安装的过程,windows安装过程请自行百度 1.首先,安装dlib.skimage前:先安装libboost sudo apt-get install ...
- ORB-SLAM 代码笔记(四)tracking代码结构
首先要清楚ORB-SLAM视觉跟踪的原理,然后对tracking.cc中的函数逐个讲解 代码的前面部分是从配置文件中读取校准好的相机参数(内参和畸变参数,以及双目的深度测量设定),并且加载ORB特征点 ...
- ORB-SLAM3 细读单目初始化过程(上)
作者:乔不思 来源:微信公众号|3D视觉工坊(系投稿) 3D视觉精品文章汇总:https://github.com/qxiaofan/awesome-3D-Vision-Papers/ 点击上方&qu ...
- 一个简单的inno setup模板
一.模板代码 基本功能包括多路径安装.多语言.自定义图标. [Setup] ShowLanguageDialog=yes AppCopyright=Copyright Reserved(C) , 36 ...
- (转) SLAM系统的研究点介绍 与 Kinect视觉SLAM技术介绍
首页 视界智尚 算法技术 每日技术 来打我呀 注册 SLAM系统的研究点介绍 本文主要谈谈SLAM中的各个研究点,为研究生们(应该是博客的多数读者吧)作一个提纲挈领的摘要.然后,我 ...
随机推荐
- HDU 2842 (递推+矩阵快速幂)
题目链接:http://acm.hdu.edu.cn/showproblem.php?pid=2842 题目大意:棒子上套环.第i个环能拿下的条件是:第i-1个环在棒子上,前i-2个环不在棒子上.每个 ...
- 使用 Sublime Text 做 Javascript 编辑器 - 集成 SublimeCodeIntel 实现代码智能提示及自动完成
Sublime Text 是一个强大并具有很强扩展性的 IDE,可通过为其安装 SublimeCodeIntel 插件实现代码智能提示和自动完成功能. 目前该插件支持以下语言: JavaScript, ...
- HDU - 人见人爱A^B
Description 求A^B的最后三位数表示的整数. 说明:A^B的含义是“A的B次方” Input 输入数据包含多个测试实例,每个实例占一行,由两个正整数A和B组成(1<=A,B< ...
- 【BZOJ】3093: [Fdu校赛2012] A Famous Game
http://www.lydsy.com/JudgeOnline/problem.php?id=3093 题意:n个球(红和蓝两种),等概率有1~n个红球.首先取出p个球且这p个球里边有q个红球,问从 ...
- JS:操作样式表3:内联和外链样式
var box = document.getElementById("box"); box.style.属性;只能读取修改行内样式. //访问元素样式2,对外链样式表进行操作 do ...
- nfs的使用
1.安装命令:sudo apt-get install nfs-kernel-server ; sudo apt-get install nfs-common; 2.执行命令:mkdir /(目录 ...
- FPGA的典型应用领域
本文关键字:fpga应用,fpga应用领域, fpga培训,FPGA应用开发入门与典型实例 一.数据采集和接口逻辑领域 1.FPGA在数据采集领域的应用 由于自然界的信号大部分是模拟信号,因此一般的信 ...
- GO语言练习:channel 缓冲机制
1.代码 2.运行 3.解析 1.代码 buffer.go package main import ( "fmt" "time" ) func readThre ...
- mysql5.7密码问题
安装: yum search mysql """mysql-server mysql mysql-devel mysql-community-server"&q ...
- ArcGIS AddIN开发异常之--“ValidateAddInXMLTask”任务意外失败
ArcGIS AddIN开发时,产生如下异常错误 2 “ValidateAddInXMLTask”任务意外失败.System.NullReferenceException: 未将对象引用设置到对象的 ...