imu标定 imu_tk
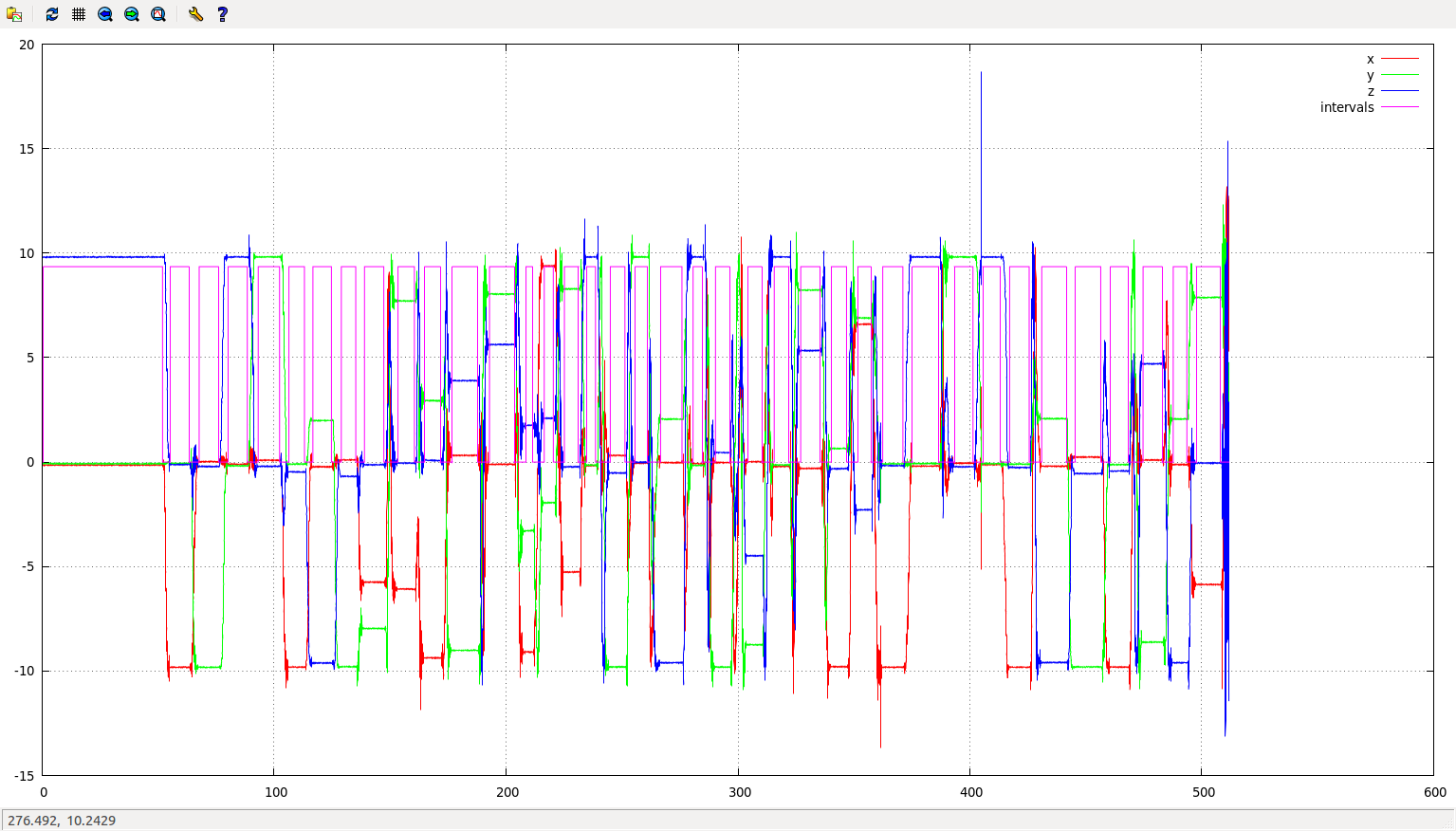
1. 首先标定加速度计,这是imu加速度计xyz三个轴在标定过程中的读数:
标定结果:

2. 利用加速度计的标定结果,标定陀螺仪,结果:

也可以使用港科大开源的一个工具:
https://github.com/gaowenliang/imu_utils
imu标定 imu_tk的更多相关文章
- IMU 标定 | 工业界和学术界有什么不同?
点击"计算机视觉life"关注,置顶更快接收消息! 由于格式问题最好在公众号上观看<IMU 标定-工业界和学术界有什么不同?> 本文主要介绍了IMU基本结构原理和误差的 ...
- Kalibr installation tutorial
How to install Kalibr I was confused about installing Kalibr, but there is no even one hint in READM ...
- 相机标定:kalibr标定工具箱使用总结
1 多相机标定 1.1采集图像和IMU 1.2制作Bag包 1)组织文件结构 ~/kalibr_workspace/test/stereo_calib bagsrc cam0 (1+time(0))* ...
- 【项目实战】自备相机+IMU跑通Vins-Mono记录
前言 初次接触SLAM,公司要求用自己的设备来跑通vinsmono这个程序,虽然已经跑通了别人的数据包,但是真正自己上手来运行这个程序,发现真的是困难重重,特意在此记载下来整个过程,以供大家参考. 我 ...
- SLAM细碎内容积累_来自各种技术交流群_持续更新
imu标定 工具包:imu_utils, imu_tk, kalibr 用kalibr做标定,相机和imu的采样频率要求:相机20,imu100.kalibr也可以做鱼眼相机+imu的联合标定 ...
- 如何从零开始系统化学习视觉SLAM?
由于显示格式问题,建议阅读原文:如何从零开始系统化学习视觉SLAM? 什么是SLAM? SLAM是 Simultaneous Localization And Mapping的 英文首字母组合,一般翻 ...
- kalibr论文阅读笔记
单目相机IMU标定 该论文将相机IMU标定分为两个大方面: 一. 使用基函数来估计时间偏差 二. 相机和IMU的空间位置转换 校准变量:重力.外参旋转和平移.时钟偏移.IMU位姿.加速度计偏置.陀螺仪 ...
- Imu_tk算法流程及数据采集要求和标定程序参数设置
Imu_tk算法流程 由于VIO中,普遍使用的是精度较低的imu,所以其需要一个较为准确的内参数和noise的估计.Noise大家通常使用Allan方差进行估计可以得到较为可信的结果,这里不赘述了.内 ...
- VINS(四)初始化与相机IMU外参标定
和单目纯视觉的初始化只需要获取R,t和feature的深度不同,VIO的初始化话通常需要标定出所有的关键参数,包括速度,重力方向,feature深度,以及相机IMU外参$R_{c}^{b}$和$p_{ ...
随机推荐
- Sql Server数据库备份脚本以及如何在阿里云云数据库RDS还原数据库(代码源自阿里云)
今天研究阿里云服务数据库的迁移,备份和还原的时候,在阿里云web后台发现了一个很好用的sql脚本,就默默地偷了过来,它可以支持全量备份,差异备份和日志备份,代码解释也都很清楚,我也尝试着跑了一下,性能 ...
- 使用Instruments中的CoreAnimation分析动画
使用Instruments中的CoreAnimation分析动画 1. 打开Instruments中的CoreAnimation 2. 运行前的准备工作 要注意勾选以下选项,便于调试 3. 运行与调试 ...
- 用标签页TitleSwitch切换不通的控制器
用标签页TitleSwitch切换不通的控制器 教程效果: 项目开发中效果: 各种源码: TitleSwitch.h 与 TitleSwitch.m (这个是修改过的升级版本) // // Title ...
- [翻译] DBCamera 轻量级定制摄像头
DBCamera 轻量级定制摄像头 https://github.com/danielebogo/DBCamera DBCamera is a simple custom camera with AV ...
- JavaWeb定时器-Spring3.x及更高版本Task使用
大背景 现代的 Web 应用程序框架在范围和复杂性方面都有所发展,应用程序的每个底层组件也必须相应地发展.作业调度是现代系统中对 Java 应用程序的一般要求,而且也是对 Java 开发人员一贯的要求 ...
- UI(二)之正式过程
2018-12-04 09:48:25 1.SetWindowsHookEx ·钩子实际上是一个处理消息的程序段,通过系统调用,把它挂入系统.每当特定的消息发出,在没有到达目的窗口前,钩子程序就先捕获 ...
- css画图那些事
上一篇css3写了一些基本的图形,想到是不是能用css3画个动物,便在网上找图片.于是选中一只大鹏鸟 也不难,一步步的写出身体部位,再定位上去就好了.来一张效果图,后面给两个加了动画,稍微难看一点,后 ...
- 解密虚拟 DOM——snabbdom 核心源码解读
本文源码地址:https://github.com/zhongdeming428/snabbdom 对很多人而言,虚拟 DOM 都是一个很高大上而且远不可及的专有名词,以前我也这么认为,后来在学习 V ...
- ubuntu 14.4 apache2 django
记录下自己的配置过程以及遇见的问题. 系统: Ubuntu 14.04 64 系统内置Python版本:2.7.6 先声明,我一下操作都以root身份. 若登录是非root身份,请在命令前加sudo. ...
- Rabbitmq.md
RabbitMQ介绍 什么是RabbitMQ RabbitMQ是实现AMQP(高级消息队列协议)的消息中间件的一种,最初起源于金融系统,用于在分布式系统中存储转发消息,在易用性.扩展性.高可用性等方面 ...