运行msckf_vio
MSCKF_vio是一种基于多状态约束卡尔曼滤波器的双目视觉里程计。其中多状态约束是指将多帧图像的相机位姿加入卡尔曼状态向量中,在进行卡尔曼增益之前通过多帧图像之间的约束进行最小二乘优化来估计特征点的空间位置,然后根据优化后的特征点空间位置来约束状态向量。其中,多帧图像保存在一个按时间排序的滑动窗口序列中,跟踪多个特征点在多帧图像中的坐标,从而建立各帧图像位姿之间的约束。另一个约束是:同一时刻的相机位姿与IMU位姿之间是一个已知的约束,这个约束用在状态增广中。在这两种约束下,卡尔曼滤波能够获得一个较好的估计。该方法的优点在于鲁棒性高,计算复杂度低,而缺点是由于其后端是卡尔曼滤波,无法用到全局的信息进行全局的优化,没有回环检测。
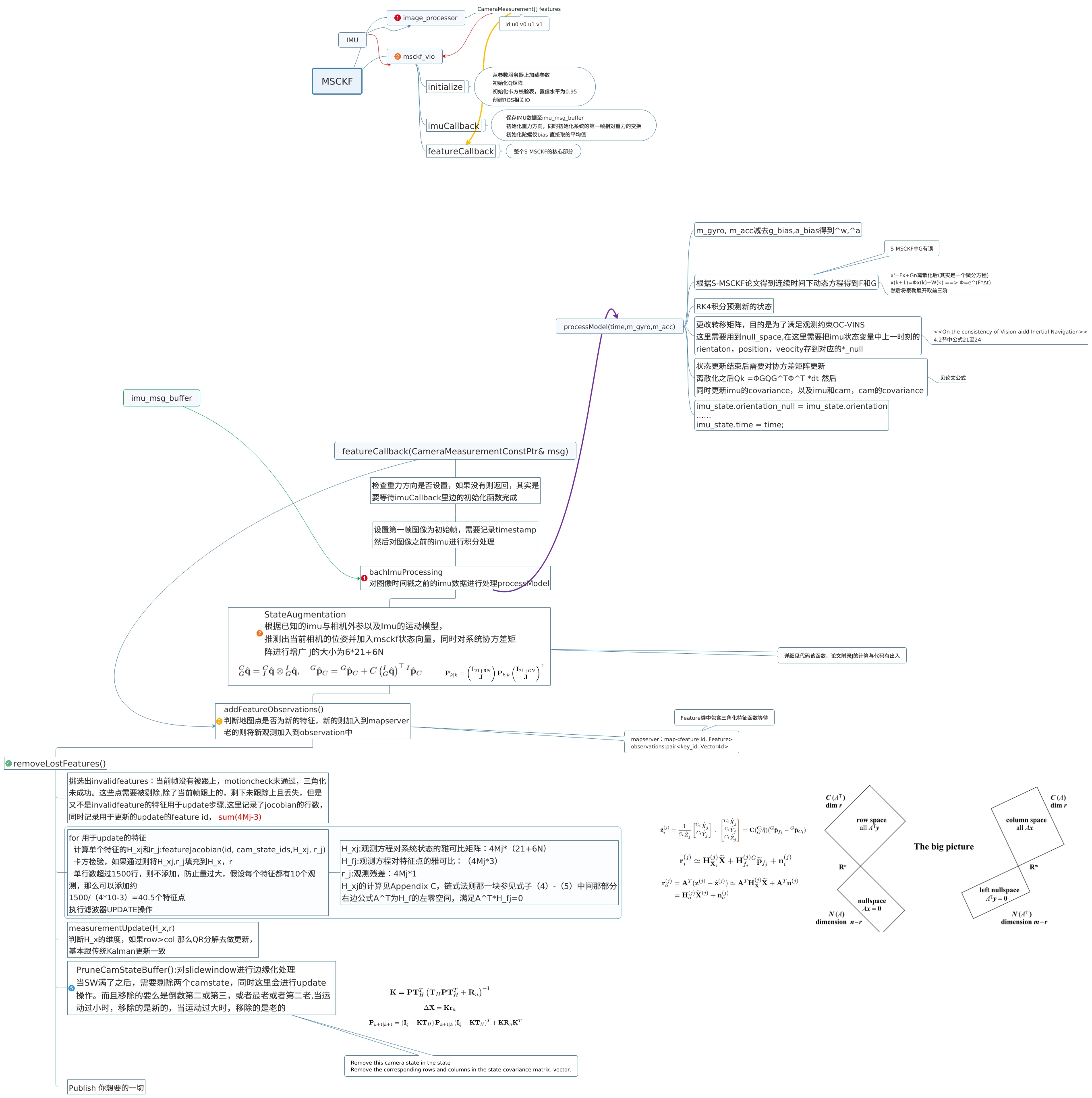
代码中主要有三个文件比较重要:src/msckf_vio.cpp, src/image_processor.cpp ,include/msckf_vio/feature.hpp。其中src/msckf_vio.cpp是系统的主体,滤波器的所有步骤都在此文件中进行,包括状态预测,状态增广,测量更新等,是后端优化部分。src/image_processor.cpp是视觉前端,主要作用是跟踪特征点,去除outliers,其中用了三种方法去跟踪特征点:LK光流跟踪,双目匹配,two-point RANSAC。include/msckf_vio/feature.hpp主要是通过多帧图像之间的约束进行最小二乘优化计算各个特征点的空间位置,这个空间位置在msckf测量更新的时候要用到(计算测量雅可比矩阵H,计算残差)。
---------------------
作者:被酱油打
来源:CSDN
原文:https://blog.csdn.net/u014491623/article/details/84712862
版权声明:本文为博主原创文章,转载请附上博文链接!
https://github.com/KumarRobotics/msckf_vio
阅读README.md,按照过程安装。
在此过程中出现了cv_bridge的错误,修改。
## Compling编译
cd /home/wj/Downloads/msckf_vio_workspace/(your_work_space)
catkin_make --pkg msckf_vio --cmake-args -DCMAKE_BUILD_TYPE=Release

## Calibration校准
准确的校准对于成功地运行软件是至关重要的。为了获得最佳的软件性能,立体相机和IMU应该是硬件同步的。注意立体标定,包括摄像机内置函数,失真,和两个摄像机之间的非本征,
你必须使用校准软件,手动设置这些参数将不够准确。
[Kalibr](https://github.com/ethz-asl/kalibr)可用于立体标定,也可用于立体相机与IMU之间的转换,所产生的kalibr YAML文件可以直接使用该软件。详情请参见“config”
文件夹中的校准文件。在“config”文件夹下的两个校准文件应与the EuRoC and [fast flight](https://github.com/KumarRobotics/msckf_vio/wiki)dataset直接工作。
校准文件的约定如下:
`camx/T_cam_imu`: takes a vector from the IMU frame to the camx frame.
`cam1/T_cn_cnm1`: takes a vector from the cam0 frame to the cam1 frame.
## Example Usage
分别为EuRoC and fast flight dataset准备了启动文件。启动 `msckf_vio_*.launch`,有两个ros node被创建:
* `image_processor` takes the stereo images to detect and track features.
* `vio` takes the feature measurements and tightly fuses them with the IMU messages to estimate pose.
用ros跑下载好的EuRoC数据
- 下载bag包:EuRoC
- 在一个终端,首先运行: roscore
再打开一个终端 :
$ cd /home/wj/Downloads/msckf_vio_workspace/ --- <path_to_catkin_ws>
$ source devel/setup.bash
$ roslaunch msckf_vio msckf_vio_euroc.launch- 再打开一个终端,打开rviz: rosrun rviz rviz -d /home/wj/Downloads/msckf_vio_workspace/src/msckf_vio/rviz/rviz_euroc_config.rviz //rviz显示模型
- 再打开一个终端,载入数据: rosbag play /home/wj/Downloads/dataset/EuRoC/ROS_bag/MH_05_difficult.bag
运行msckf_vio的更多相关文章
- ASP.NET Aries 入门开发教程1:框架下载与运行
背景: 鉴于框架的使用者越来越多,文档太少,不少用户反映框架的入门门槛太高. 好吧,再辛苦下,抽时间写教程吧! 步骤1:下载框架源码 开源地址:https://github.com/cyq1162/A ...
- 在传统.NET Framework 上运行ASP.NET Core项目
新的项目我们想用ASP.NET Core来开发,但是苦于我们历史的遗产很多,比如<使用 JavaScriptService 在.NET Core 里实现DES加密算法>,我们要估计等到.N ...
- Sublime Text3配置在可交互环境下运行python快捷键
安装插件 在Sublime Text3下面写代码感觉很不错,但是写Python的时候遇到了一些问题. 用Sublime Text3打开python文件,或者在Sublime Text3下写好pytho ...
- hadoop 2.7.3本地环境运行官方wordcount-基于HDFS
接上篇<hadoop 2.7.3本地环境运行官方wordcount>.继续在本地模式下测试,本次使用hdfs. 2 本地模式使用fs计数wodcount 上面是直接使用的是linux的文件 ...
- hadoop 2.7.3本地环境运行官方wordcount
hadoop 2.7.3本地环境运行官方wordcount 基本环境: 系统:win7 虚机环境:virtualBox 虚机:centos 7 hadoop版本:2.7.3 本次先以独立模式(本地模式 ...
- Docker笔记一:基于Docker容器构建并运行 nginx + php + mysql ( mariadb ) 服务环境
首先为什么要自己编写Dockerfile来构建 nginx.php.mariadb这三个镜像呢?一是希望更深入了解Dockerfile的使用,也就能初步了解docker镜像是如何被构建的:二是希望将来 ...
- Linux scp 设置nohup后台运行
Linux scp 设置nohup后台运行 1.正常执行scp命令 2.输入ctrl + z 暂停任务 3.bg将其放入后台 4.disown -h 将这个作业忽略HUP信号 5.测试会话中断,任务继 ...
- 在docker中运行ASP.NET Core Web API应用程序(附AWS Windows Server 2016 widt Container实战案例)
环境准备 1.亚马逊EC2 Windows Server 2016 with Container 2.Visual Studio 2015 Enterprise(Profresianal要装Updat ...
- Android数据存储之Android 6.0运行时权限下文件存储的思考
前言: 在我们做App开发的过程中基本上都会用到文件存储,所以文件存储对于我们来说是相当熟悉了,不过自从Android 6.0发布之后,基于运行时权限机制访问外置sdcard是需要动态申请权限,所以以 ...
随机推荐
- Linux下tomcat运行命令
tomcat启动 [root@master webapps]# /usr/local/tomcat7.0/bin/catalina.sh start startup.sh的源代码,其实就是执行 c ...
- unity 4.6.1脚本解析出错,没有激活的勾,方法顺序出错
检查方法声明上的注释:如/**xx*/或/*xx*/改为//形式 没有激活的勾: 1.如/**xx*/或/*xx*/改为//形式 2.必须保留Start函数
- Stephen Hawking Taught Us a Lot About How to Live
勇气.好奇心.幽默感,那些霍金教给我们的事Stephen Hawking Taught Us a Lot About How to LiveStephen Hawking, the English c ...
- English Conversation – Checking in at an airport
English Conversation – Checking in at an airport Share Tweet Share Tagged With: Ben Franklin Exercis ...
- 转: HTML5之placeholder属性以及如何更改placeholder属性中文字颜色
今天在群里看到群友问了一个这样的问题,就是如何更改placeholder属性中文字的颜色,以前用过这属性,却是没更改过颜色,于是便试了试,中途遇到些问题,查找资料后特来总结一下. 熟悉HTML5的人应 ...
- t959 unknown device 解决办法
换机器没用 换数据线没用 最后装了Kies3,好了! -------- 更新 跟数据线也有关系 换一条三星自带的试试
- angularjs 请求数据转换为Form Data传参
在angularjs中配置好服务,有时传参会导致后台借不到值或者后台直接报错: 这就与后台框架有关,如果后台是以public ModelAndView接收接口传过来的参数,这种情况,前台传参的形式比较 ...
- ArcGIS案例学习笔记_3_2_CAD数据导入建库
ArcGIS案例学习笔记_3_2_CAD数据导入建库 计划时间:第3天下午 内容:CAD数据导入,建库和管理 目的:生成地块多边形,连接属性,管理 问题:CAD存在拓扑错误,标注位置偏移 教程:pdf ...
- C++ CTreeview的checkbox使用方法
1. 消息事件 (1)鼠标点击当前ITEM的CHECKBOX:引发NM_CLICK事件并传递TVHT_ONITEMSTATEICON. (2)鼠标点击当前ITEM的TEXT:引发NM_CLIC ...
- Java学习07 (第一遍) - Spring MVC
跳过Struts2,直接学习Spring MVC MVC,自己画的 属性(Property/Attribute),事件(Event),方法(method/procedure),函数(Function) ...